Vous aimerez peut-être aussi
- Sistemas de puesta a tierra: Diseñado con IEEE-80 y evaluado con MEFD'EverandSistemas de puesta a tierra: Diseñado con IEEE-80 y evaluado con MEFÉvaluation : 4.5 sur 5 étoiles4.5/5 (7)
- Análisis Elástico de CapasDocument2 pagesAnálisis Elástico de CapasGyver Pacherres SilvaPas encore d'évaluation
- Flujo de AguaDocument10 pagesFlujo de Aguapipe.aguirre1Pas encore d'évaluation
- Ensayos Dinamicos Del SueloDocument9 pagesEnsayos Dinamicos Del SuelodfpambiPas encore d'évaluation
- Verificacion Mecanistica VFDocument57 pagesVerificacion Mecanistica VFCesar CosingaPas encore d'évaluation
- Azizi Cap 3Document58 pagesAzizi Cap 3Shantall D. PinoPas encore d'évaluation
- Pavimentos Clase 20 Esfuerzos Rigidos AlabeoDocument46 pagesPavimentos Clase 20 Esfuerzos Rigidos AlabeoGiancarloReyPas encore d'évaluation
- Modelos de Suelo Constitutivo y Parámetros Del Suelo Articulo PDFDocument61 pagesModelos de Suelo Constitutivo y Parámetros Del Suelo Articulo PDFBellitayPas encore d'évaluation
- Fundación ElasticaDocument4 pagesFundación ElasticaivanPas encore d'évaluation
- Articulaciones PlasticasDocument17 pagesArticulaciones PlasticasElder CubasPas encore d'évaluation
- Capa LimiteDocument42 pagesCapa LimiteKevin CabreraPas encore d'évaluation
- Seguridad A La RoturaDocument10 pagesSeguridad A La RoturaJesus A. HernandezPas encore d'évaluation
- 4) Miembros A FlexiónDocument28 pages4) Miembros A FlexiónMiguel Angel Vielma CamachoPas encore d'évaluation
- Articulo de Cimentaciones SuperficialesDocument17 pagesArticulo de Cimentaciones SuperficialesUALU333Pas encore d'évaluation
- GRUPO N 02 - 2021-2 - Segundo Control de LecturaDocument85 pagesGRUPO N 02 - 2021-2 - Segundo Control de LecturaChristian RojasPas encore d'évaluation
- La Rigidez de Las Cimentaciones SuperficialesDocument17 pagesLa Rigidez de Las Cimentaciones SuperficialesJeffrey AlvarezPas encore d'évaluation
- Apoyos ElasticosDocument32 pagesApoyos ElasticosCarlos Echegaray80% (5)
- Modulo de ReaccionDocument19 pagesModulo de Reaccionjoelmt30100% (1)
- Amortiguamiento Estructural. Dr. Dionisio BernalDocument40 pagesAmortiguamiento Estructural. Dr. Dionisio BernalJaime CoronellPas encore d'évaluation
- Cap 03 - Placas 03Document15 pagesCap 03 - Placas 03Dwight AndersonPas encore d'évaluation
- 33 - Refuerzo de Suelos para El Diseño Sísmico de Estructuras Geotécnicas - ScienceDirectDocument12 pages33 - Refuerzo de Suelos para El Diseño Sísmico de Estructuras Geotécnicas - ScienceDirectLuis MamaniPas encore d'évaluation
- Investigacion Sobre Metodos de Diseños de Losas de CimentacionDocument18 pagesInvestigacion Sobre Metodos de Diseños de Losas de CimentacionDarwin VelizPas encore d'évaluation
- Foro 2 Eac PDFDocument19 pagesForo 2 Eac PDFEdgar AguilarPas encore d'évaluation
- JDocument4 pagesJINCCA COLOMBIAPas encore d'évaluation
- Teoria Elastica de SuelosDocument21 pagesTeoria Elastica de SuelosMaria CarbalPas encore d'évaluation
- Aplicaciones en La Ingenieria EdoDocument8 pagesAplicaciones en La Ingenieria EdoDAMIAN BRAVO ENCALADAPas encore d'évaluation
- Metodo Del Balastro de Winkler Viga Sobre Apoyos ElasticosDocument12 pagesMetodo Del Balastro de Winkler Viga Sobre Apoyos ElasticosNico PardoPas encore d'évaluation
- Amortiguamiento EstructuralDocument9 pagesAmortiguamiento EstructuralWalterAmericoSichaPas encore d'évaluation
- Modulo ResilienteDocument12 pagesModulo ResilienteDario AislantPas encore d'évaluation
- Ancho EfectivoDocument3 pagesAncho EfectivoKARLAPas encore d'évaluation
- LosaDocument22 pagesLosaMARIANAISABEL CONTRERAS ALMONTESPas encore d'évaluation
- Fundamentos de ReologiaDocument45 pagesFundamentos de ReologiaGabriela Vargas González100% (4)
- DINAMICA InformeDocument20 pagesDINAMICA InformeROBERT MERINOPas encore d'évaluation
- Tensor de Deformacion para DeformacionesDocument5 pagesTensor de Deformacion para DeformacionesBetza Neymar JR Vargas100% (4)
- Resumen de Canales No RevestidosDocument6 pagesResumen de Canales No RevestidosHUGO ALBERTO PUENTES GALLARDOPas encore d'évaluation
- Bendezu-Analisis EstructuralDocument14 pagesBendezu-Analisis EstructuralyersinPas encore d'évaluation
- Trabajo de Suelos 2Document13 pagesTrabajo de Suelos 2eduper3Pas encore d'évaluation
- Cuestionario RaeDocument5 pagesCuestionario RaeKleber ParedesPas encore d'évaluation
- Practica Califica N°02 - Ingenieria SismicaDocument14 pagesPractica Califica N°02 - Ingenieria Sismicaroder torrePas encore d'évaluation
- Ejemplo de Losa AlivianadaDocument14 pagesEjemplo de Losa AlivianadaAdrián DemonariPas encore d'évaluation
- Analisis de Asiento ZapatasDocument9 pagesAnalisis de Asiento ZapatasMiguelPas encore d'évaluation
- Tarea - 1 - Orjuela Cruz Maria Alejandra - Luis Felipe Rodriguez DuranDocument15 pagesTarea - 1 - Orjuela Cruz Maria Alejandra - Luis Felipe Rodriguez DuranLuis Felipe Rodriguez DuranPas encore d'évaluation
- 09 Dimensionamiento A Flexion SimpleDocument10 pages09 Dimensionamiento A Flexion SimplesantinobocaPas encore d'évaluation
- Amortiguamiento en EstructurasDocument12 pagesAmortiguamiento en EstructurasFrancis LozadaPas encore d'évaluation
- Tuberias Perfiladas EnterradasDocument42 pagesTuberias Perfiladas EnterradasGustavo DelgadoPas encore d'évaluation
- Periodo de Vida de Losn Pavimentos Rígidos (Garcia, 2005)Document14 pagesPeriodo de Vida de Losn Pavimentos Rígidos (Garcia, 2005)JOSE ISRAEL TORRICO NUÑEZPas encore d'évaluation
- Tarea de Puntales y TensoresDocument26 pagesTarea de Puntales y TensoresFelix Santiago0% (1)
- Modelo ViscoplasticoDocument13 pagesModelo ViscoplasticoJuan AcostaPas encore d'évaluation
- Esfuerzo y Deformacion en Pav FlexiblesDocument28 pagesEsfuerzo y Deformacion en Pav Flexiblesayin otañe bendezuPas encore d'évaluation
- Capitulo3 Cam ClayDocument26 pagesCapitulo3 Cam ClayRonald LopezPas encore d'évaluation
- Viga CanalDocument63 pagesViga CanalJuan Francisco Mux100% (1)
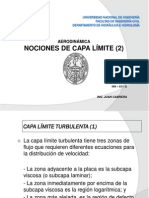
- 05 Capa Turbulenta PDFDocument44 pages05 Capa Turbulenta PDFeybárcenaPas encore d'évaluation
- DocumentoDocument4 pagesDocumentoCarlos HuancaPas encore d'évaluation
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoD'EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoÉvaluation : 4.5 sur 5 étoiles4.5/5 (12)
- Undrained seismic response of underground structuresD'EverandUndrained seismic response of underground structuresPas encore d'évaluation
- Guía para el análisis y solución de problemas de resistencia de materialesD'EverandGuía para el análisis y solución de problemas de resistencia de materialesPas encore d'évaluation
- Hormigón armado. Tomo II - 2.a edición: Introducción a nueva norma CIRSOC 201/05 A.C.I. 318D'EverandHormigón armado. Tomo II - 2.a edición: Introducción a nueva norma CIRSOC 201/05 A.C.I. 318Évaluation : 4.5 sur 5 étoiles4.5/5 (2)
- Analisis y Diseño de Elementos Sometidos A Flexión SimpleDocument7 pagesAnalisis y Diseño de Elementos Sometidos A Flexión SimpleAlis La CruzPas encore d'évaluation
- Ram Connections. Familias de Juntas y Cargas Requeridas para Su Diseño.Document1 pageRam Connections. Familias de Juntas y Cargas Requeridas para Su Diseño.Alis La CruzPas encore d'évaluation
- PORTADADocument1 pagePORTADAAlis La CruzPas encore d'évaluation
- Soluciones BentlyDocument14 pagesSoluciones BentlyGilberto Avila JiménezPas encore d'évaluation
- Modelos Matematicos para La Estimacion de Tormentas de Diseño en El Estado CojedesDocument14 pagesModelos Matematicos para La Estimacion de Tormentas de Diseño en El Estado CojedesAlis La CruzPas encore d'évaluation
- Tablas de Consumo para SoldaduraDocument9 pagesTablas de Consumo para SoldaduraAlis La CruzPas encore d'évaluation
- Manual para Ductos de Basura 2013Document8 pagesManual para Ductos de Basura 2013Alis La CruzPas encore d'évaluation
- Gastos Picos en Cuencas Sin RegistrosDocument26 pagesGastos Picos en Cuencas Sin RegistrosAlis La CruzPas encore d'évaluation
- Proceso Constructivo de Losa de Concreto ArmadoDocument13 pagesProceso Constructivo de Losa de Concreto Armadojulioparraga_27554100% (2)
- Precipitacion. Ospino EstacionDocument4 pagesPrecipitacion. Ospino EstacionAlis La CruzPas encore d'évaluation
- Análisis de Tormentas ExtremasDocument11 pagesAnálisis de Tormentas ExtremasAlis La CruzPas encore d'évaluation
- Practicas de Aforo de Un RioDocument2 pagesPracticas de Aforo de Un RioAlis La CruzPas encore d'évaluation
- Inten. Hda. CamburitoDocument17 pagesInten. Hda. CamburitoAlis La CruzPas encore d'évaluation
- Practicas de Afoto de Un RioDocument6 pagesPracticas de Afoto de Un RioAlis La CruzPas encore d'évaluation
- Método RacionalDocument6 pagesMétodo RacionalAlis La CruzPas encore d'évaluation
- Compendio de Curvas Idf de VenezuelaDocument12 pagesCompendio de Curvas Idf de VenezuelaAlis La CruzPas encore d'évaluation
- Control de ObrasDocument15 pagesControl de ObrasAlis La CruzPas encore d'évaluation
- Tiempo de ConcentracionDocument1 pageTiempo de ConcentracionJohan Paez RinconPas encore d'évaluation
- ArcoDocument18 pagesArcoMica QuirogaPas encore d'évaluation
- Autocad 2DDocument13 pagesAutocad 2DAlis La CruzPas encore d'évaluation
- Tabla de Coeficientes de EscorrentíaDocument1 pageTabla de Coeficientes de EscorrentíaAlis La CruzPas encore d'évaluation
- Calculo de Unidades de DescargaDocument2 pagesCalculo de Unidades de DescargaAlis La CruzPas encore d'évaluation
- Formato IndhurDocument6 pagesFormato IndhurAlis La CruzPas encore d'évaluation
- Combinaciones de Cargas (Ula)Document109 pagesCombinaciones de Cargas (Ula)Irwin BorreroPas encore d'évaluation
- Control de Trafico UrbanoDocument9 pagesControl de Trafico UrbanoAlis La CruzPas encore d'évaluation
- Arcos Circulares BiarticuladosDocument29 pagesArcos Circulares BiarticuladosAlis La CruzPas encore d'évaluation
- CapV TiposPilotesDocument63 pagesCapV TiposPilotesAntonio GlezPas encore d'évaluation
- Administracion ContratoDocument36 pagesAdministracion ContratoAlis La CruzPas encore d'évaluation
- Merca 040Document76 pagesMerca 040Ro JuanPas encore d'évaluation
- No Disponibilidad Sedal 16 de Abril 2016Document8 pagesNo Disponibilidad Sedal 16 de Abril 2016Victor PalacioPas encore d'évaluation
- 2 (Teoría Vocabulario Contextual)Document30 pages2 (Teoría Vocabulario Contextual)Yáñez Natalia100% (3)
- Curso Diseño Sísmico de Presas PDFDocument247 pagesCurso Diseño Sísmico de Presas PDFAna Crespo Sáez0% (1)
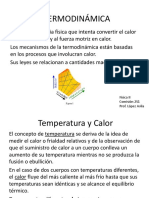
- Temp y Calor Marzo 2012Document101 pagesTemp y Calor Marzo 2012Guillermo Cesar GanemPas encore d'évaluation
- Métodos NuméricosDocument7 pagesMétodos NuméricosSilvana GetialPas encore d'évaluation
- Concepto de La IntegralDocument14 pagesConcepto de La IntegralHarol Alexander Rincòn MarinezPas encore d'évaluation
- 3er Fisica Magnitudes FisicasDocument2 pages3er Fisica Magnitudes FisicasAnonymous dfBip30% (1)
- Resumen Orden Interno, Estructura, SimetriaDocument17 pagesResumen Orden Interno, Estructura, SimetriaErik Robinson Trincado CabezasPas encore d'évaluation
- Reporte Practica Compuertas LogicasDocument12 pagesReporte Practica Compuertas Logicasilustresimio100% (1)
- Anexo 3 - ConexionesDocument69 pagesAnexo 3 - ConexionesBenito CamelasPas encore d'évaluation
- Sistema de Pronóstico de La Demanda de Productos PDFDocument142 pagesSistema de Pronóstico de La Demanda de Productos PDFlucasPas encore d'évaluation
- Planeaciones Pensamiento MatemáticoDocument3 pagesPlaneaciones Pensamiento MatemáticoEli AguilarPas encore d'évaluation
- Aryabhata EsDocument1 pageAryabhata EsNESTOR VASTAPas encore d'évaluation
- Caso BDocument2 pagesCaso BJoseDeLaRosaPerez20% (5)
- ListaDocument3 pagesListaEnrique RobledoPas encore d'évaluation
- Clase 9 y 10 Muestreo Cuantitativo y CualitativoDocument26 pagesClase 9 y 10 Muestreo Cuantitativo y Cualitativofran121604Pas encore d'évaluation
- Is-Clase 8Document43 pagesIs-Clase 8WilPas encore d'évaluation
- Guia 3-Movimiento en Una DirecciónDocument4 pagesGuia 3-Movimiento en Una DirecciónIvailo ApitzPas encore d'évaluation
- Fundamento Teórico Garfield - Ben-ZviDocument15 pagesFundamento Teórico Garfield - Ben-ZviWENDY BRITOPas encore d'évaluation
- HT 09 2022Document4 pagesHT 09 2022Marcos EspinozaPas encore d'évaluation
- 19201003Document143 pages19201003Tomás Jesus Quiroz GuevaraPas encore d'évaluation
- EjercicioEconometría - Modelo Log-LinealDocument3 pagesEjercicioEconometría - Modelo Log-LinealLauraPas encore d'évaluation
- Tromba PDFDocument679 pagesTromba PDFDaniel SuarezPas encore d'évaluation
- FLOTACIONDocument4 pagesFLOTACIONRosa María HerreraPas encore d'évaluation
- Aproximacion de VogelDocument5 pagesAproximacion de VogelBrandoll PamucenaPas encore d'évaluation
- Inventario ForestalDocument8 pagesInventario ForestalDickey DesignPas encore d'évaluation
- G2-Guia2-Estos Son Los Numeros Del 500 Al 999Document5 pagesG2-Guia2-Estos Son Los Numeros Del 500 Al 999May ValenciaPas encore d'évaluation
- DibujarDocument7 pagesDibujarFrancisca FariasPas encore d'évaluation