Vous aimerez peut-être aussi
- Propellers PDFDocument61 pagesPropellers PDFfaridPas encore d'évaluation
- Natural Stability and the Parachute Principle in AeroplanesD'EverandNatural Stability and the Parachute Principle in AeroplanesPas encore d'évaluation
- Powering and Propulsion: Lectures ONDocument61 pagesPowering and Propulsion: Lectures ONbovingPas encore d'évaluation
- Propeller ElectricityDocument23 pagesPropeller ElectricitysoneraktasPas encore d'évaluation
- Illustrated Sail & Rig Tuning: Genoa & mainsail trim, spinnaker & gennaker, rig tuningD'EverandIllustrated Sail & Rig Tuning: Genoa & mainsail trim, spinnaker & gennaker, rig tuningÉvaluation : 3.5 sur 5 étoiles3.5/5 (2)
- Journee SteeringDocument21 pagesJournee SteeringsorenvinPas encore d'évaluation
- Azimuthal PropellersDocument7 pagesAzimuthal PropellersElena Turcu0% (1)
- Ship Stability at The Management LevelDocument4 pagesShip Stability at The Management LevelShree Kanha100% (1)
- Model aeroplanes: The building of model monoplanes, biplanes, etc., together with a chapter on building a model airshipD'EverandModel aeroplanes: The building of model monoplanes, biplanes, etc., together with a chapter on building a model airshipPas encore d'évaluation
- Transients Analysis of A Tidal Currents Self-Balancing Kinetic Turbine With On Shore BasementDocument8 pagesTransients Analysis of A Tidal Currents Self-Balancing Kinetic Turbine With On Shore BasementDimas Hanif NugrahaPas encore d'évaluation
- Planning+and+Design+of+Water+Area UnlockedDocument37 pagesPlanning+and+Design+of+Water+Area Unlocked蓉蓉100% (1)
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsD'EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsPas encore d'évaluation
- Day 4Document7 pagesDay 4MALIK TALHA ALI SAJIDPas encore d'évaluation
- Bow Thruster, Ship Stabilizer MGPSDocument13 pagesBow Thruster, Ship Stabilizer MGPSSayem kaifPas encore d'évaluation
- Modeling Extreme Ship Rolling in WavesDocument27 pagesModeling Extreme Ship Rolling in WavesOscar Sacases PlanasPas encore d'évaluation
- RER Unit 2 Concise Notes Sidarth SirDocument21 pagesRER Unit 2 Concise Notes Sidarth Sirgociy20905Pas encore d'évaluation
- Unit 1 Part-A: Coventional HullDocument5 pagesUnit 1 Part-A: Coventional HullPrabakaran MgkPas encore d'évaluation
- Goodyear Marine FendersDocument10 pagesGoodyear Marine FendersIbato RutaPas encore d'évaluation
- Flow Analysis of Vortex Generators On Wing Sections by Stereoscopic Particle Image Velocimetry MeasurementsDocument12 pagesFlow Analysis of Vortex Generators On Wing Sections by Stereoscopic Particle Image Velocimetry MeasurementsNITESH JHAPas encore d'évaluation
- Waterjet Propulsion of Small-Draught Inland Waterways ShipsDocument6 pagesWaterjet Propulsion of Small-Draught Inland Waterways ShipsshahjadaPas encore d'évaluation
- Forefoot Design For Planing HullsDocument17 pagesForefoot Design For Planing Hullsadslfasdf100% (1)
- Towing Solutions IncDocument6 pagesTowing Solutions Incboca1966100% (1)
- Reduce Drag of Marine VehiclesDocument13 pagesReduce Drag of Marine VehiclesAmeer Bakry ZulkiffliPas encore d'évaluation
- High Speed MArine VehiclesDocument11 pagesHigh Speed MArine VehiclesAnonymous e3ceN15Pas encore d'évaluation
- Mera Project HaiDocument10 pagesMera Project Hairidamsingh97Pas encore d'évaluation
- Ship Dynamics - Lecture 2Document16 pagesShip Dynamics - Lecture 2shayan.rabizadePas encore d'évaluation
- Ship stability basicsDocument5 pagesShip stability basicsRachmat Hidayat SapwariPas encore d'évaluation
- Escorting Ships with Tractor Tugs Transverse Arrest ManeuverDocument5 pagesEscorting Ships with Tractor Tugs Transverse Arrest ManeuverDiego Ramón Gonzalez-LlanosPas encore d'évaluation
- Fuzzy Control of A SailboatDocument17 pagesFuzzy Control of A SailboatOscarFerrerRibasPas encore d'évaluation
- Mercator Wind Kort EndeligDocument12 pagesMercator Wind Kort EndeligĐỗ Nam PhúPas encore d'évaluation
- Standardized Tractor Tug Commands For Ship-Assist WorkDocument5 pagesStandardized Tractor Tug Commands For Ship-Assist WorkPoyraz Rüzgar100% (1)
- Pivot PointDocument22 pagesPivot Pointjanderclanderpeich100% (1)
- The Circular Sea Clam Wave Energy ConverterDocument9 pagesThe Circular Sea Clam Wave Energy ConverterJuancito A Portugal BPas encore d'évaluation
- Yutesma 0704, IJEASTDocument5 pagesYutesma 0704, IJEASTFatehsingh parabPas encore d'évaluation
- Wind Turbine Propulsion of ShipsDocument10 pagesWind Turbine Propulsion of ShipsBoris SitorusPas encore d'évaluation
- Gorlov Helical TurbineDocument26 pagesGorlov Helical TurbineSamuel BasseyPas encore d'évaluation
- Study On Maneuvering of A Large Tanker in Still Water and Adverse Weather ConditionsDocument143 pagesStudy On Maneuvering of A Large Tanker in Still Water and Adverse Weather ConditionsMohamed MohamedPas encore d'évaluation
- Renewable Energy: Katsutoshi Shirasawa, Kohei Tokunaga, Hidetsugu Iwashita, Tsumoru ShintakeDocument7 pagesRenewable Energy: Katsutoshi Shirasawa, Kohei Tokunaga, Hidetsugu Iwashita, Tsumoru ShintakeBulelat Orozco SagunPas encore d'évaluation
- Ship Handling OverviewDocument29 pagesShip Handling Overviewjjespiritu21100% (1)
- DW Offshore Deck Mating Onto A Pre-Installed Semi-Submersible by Means of A Self-Propelled Heavy Transport VesselDocument42 pagesDW Offshore Deck Mating Onto A Pre-Installed Semi-Submersible by Means of A Self-Propelled Heavy Transport VesselSHARATHPas encore d'évaluation
- On Floating and Flying WindmillDocument33 pagesOn Floating and Flying WindmillTANISHK JHARWAL100% (1)
- 2 193 Suryo Adji ch07Document47 pages2 193 Suryo Adji ch07Jón Ingvar PálssonPas encore d'évaluation
- Amecrc PDFDocument17 pagesAmecrc PDFshimul2008Pas encore d'évaluation
- Unit 2 EE8703 Wind EnergyDocument23 pagesUnit 2 EE8703 Wind Energymokkai of the day videosPas encore d'évaluation
- Propulsion GeneralitesDocument2 pagesPropulsion GeneralitesChemss EddinnePas encore d'évaluation
- An Analysis of The NREL 5 MW Semisubmersible Wind Turbine Using Data From Morro BayDocument22 pagesAn Analysis of The NREL 5 MW Semisubmersible Wind Turbine Using Data From Morro BayDantheManPas encore d'évaluation
- Anir PPTDocument10 pagesAnir PPTVivek SambangiPas encore d'évaluation
- International WaterjetDocument5 pagesInternational Waterjetdeepak16051988Pas encore d'évaluation
- Wind & CurrentDocument9 pagesWind & CurrentAurelio DutariPas encore d'évaluation
- Day 3Document16 pagesDay 3MALIK TALHA ALI SAJIDPas encore d'évaluation
- Stabilising SystemsDocument4 pagesStabilising Systemsshafwan1980Pas encore d'évaluation
- Hydrodynamics For Ocean Engineers: Marine PropellersDocument20 pagesHydrodynamics For Ocean Engineers: Marine PropellersSp1K7Pas encore d'évaluation
- Fabrication of Multi Blade Wind Mill For Higher EfficiencyDocument49 pagesFabrication of Multi Blade Wind Mill For Higher EfficiencyANAND KRISHNANPas encore d'évaluation
- How Wind, Current and Anchors Affect Ship HandlingDocument19 pagesHow Wind, Current and Anchors Affect Ship Handlingpolaris25100% (8)
- Word Ship HandlingDocument9 pagesWord Ship Handlingrigel100% (1)
- One Example Is Taken For Calculation Purpose. in This A 70,000 Tons Deadweight OilDocument4 pagesOne Example Is Taken For Calculation Purpose. in This A 70,000 Tons Deadweight OilFairuzPas encore d'évaluation
- MGMT 2 Week 9&10Document2 pagesMGMT 2 Week 9&10DarkxeiDPas encore d'évaluation
- Resumen Temario 2010Document53 pagesResumen Temario 2010Marino MercantePas encore d'évaluation
- Maritime Nav RC 2Document20 pagesMaritime Nav RC 2dutvaPas encore d'évaluation
- KSE-141-2 Daily Working Result Report-1Document4 pagesKSE-141-2 Daily Working Result Report-1Ghazali DeanPas encore d'évaluation
- 1 Seam 2 LM MidtermDocument114 pages1 Seam 2 LM MidtermTrestan TenegraPas encore d'évaluation
- Passage Plan Card - "G" - M/S " ARIELLA ": From: To: DateDocument3 pagesPassage Plan Card - "G" - M/S " ARIELLA ": From: To: DateAlexandru VisanPas encore d'évaluation
- HADUCO company profile and M/V SEABULK RAVEN specificationsDocument1 pageHADUCO company profile and M/V SEABULK RAVEN specificationsNMHaPas encore d'évaluation
- Academia Navala"Mircea Cel Batran": Dinamica Sistemelor de PropulsieDocument11 pagesAcademia Navala"Mircea Cel Batran": Dinamica Sistemelor de PropulsieFlorin MaceseanuPas encore d'évaluation
- Republic of The Marshall IslandsDocument1 pageRepublic of The Marshall IslandsAndreas IoannouPas encore d'évaluation
- Warship Pictoral 27 - Kriegsmarine Type VII U-BoatsDocument74 pagesWarship Pictoral 27 - Kriegsmarine Type VII U-BoatsStiven McTowelie100% (9)
- Declaration of Security Between Ship & Port FacilityDocument1 pageDeclaration of Security Between Ship & Port FacilityPavel ViktorPas encore d'évaluation
- 001-MV. Ella 1.21.00001Document1 page001-MV. Ella 1.21.00001Slamet HandokoPas encore d'évaluation
- Carnival Panorama Cruise Itineraries 2019 PDFDocument2 pagesCarnival Panorama Cruise Itineraries 2019 PDFJuan Esteban Ordoñez LopezPas encore d'évaluation
- The MSB JournalDocument34 pagesThe MSB Journalanon_835518017Pas encore d'évaluation
- Pilot TugmasterDocument11 pagesPilot TugmasterenglisgoPas encore d'évaluation
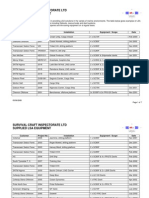
- Projects - Experience - List Jta Survival Craft BoatDocument7 pagesProjects - Experience - List Jta Survival Craft BoatAnkur PiparsaniaPas encore d'évaluation
- Q88 - Wind of GraceDocument7 pagesQ88 - Wind of GraceFemi BalogunPas encore d'évaluation
- The Cruise IndustryDocument51 pagesThe Cruise IndustryBrian Castañeda100% (1)
- Sailing Hydrofoils - A.Y.R.S. Publication No.74, 1970Document292 pagesSailing Hydrofoils - A.Y.R.S. Publication No.74, 1970VitBarPas encore d'évaluation
- INTERNATIONAL SAFETY MANAGEMENT CODE GUIDEDocument38 pagesINTERNATIONAL SAFETY MANAGEMENT CODE GUIDEsuroyo100% (1)
- IACS Unified Interpretation (UI)Document74 pagesIACS Unified Interpretation (UI)Gelu TuraiPas encore d'évaluation
- 2020-10-01 CL Ic BoatDocument84 pages2020-10-01 CL Ic BoatAnantoly KoretskyPas encore d'évaluation
- Chesapeake Light Craft - PocketShip Long Distance Sailboat Boat Yacht Plan Plans (2009, Wooden Boat Magazine)Document6 pagesChesapeake Light Craft - PocketShip Long Distance Sailboat Boat Yacht Plan Plans (2009, Wooden Boat Magazine)kkd108100% (1)
- Charter Party Documents ExplainedDocument27 pagesCharter Party Documents ExplainedDinu Robert IonutPas encore d'évaluation
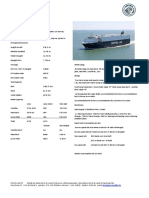
- MF MykinesDocument2 pagesMF Mykinesgiovanni julioPas encore d'évaluation
- Trosvikgubben As: Taklift - 400 Tonn Floating CraneDocument4 pagesTrosvikgubben As: Taklift - 400 Tonn Floating CraneDiana AnghelachePas encore d'évaluation
- French SSBN Submarine RedoutableDocument29 pagesFrench SSBN Submarine Redoutableapi-284780685Pas encore d'évaluation
- BargeDocument5 pagesBargeNirmal WeiderPas encore d'évaluation
- The Legend of the Flying DutchmanDocument2 pagesThe Legend of the Flying Dutchmandar ajiPas encore d'évaluation
- Introduction to Power System ProtectionD'EverandIntroduction to Power System ProtectionÉvaluation : 5 sur 5 étoiles5/5 (1)
- Shorting the Grid: The Hidden Fragility of Our Electric GridD'EverandShorting the Grid: The Hidden Fragility of Our Electric GridÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)
- Implementing an Integrated Management System (IMS): The strategic approachD'EverandImplementing an Integrated Management System (IMS): The strategic approachÉvaluation : 5 sur 5 étoiles5/5 (2)
- Idaho Falls: The Untold Story of America's First Nuclear AccidentD'EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentÉvaluation : 4.5 sur 5 étoiles4.5/5 (21)
- Build Your Own Electric Vehicle, Third EditionD'EverandBuild Your Own Electric Vehicle, Third EditionÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesD'EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesÉvaluation : 4.5 sur 5 étoiles4.5/5 (21)
- The Grid: The Fraying Wires Between Americans and Our Energy FutureD'EverandThe Grid: The Fraying Wires Between Americans and Our Energy FutureÉvaluation : 3.5 sur 5 étoiles3.5/5 (48)
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialD'EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialPas encore d'évaluation
- OFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyD'EverandOFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyPas encore d'évaluation
- Asset Integrity Management for Offshore and Onshore StructuresD'EverandAsset Integrity Management for Offshore and Onshore StructuresPas encore d'évaluation
- Renewable Energy: A Very Short IntroductionD'EverandRenewable Energy: A Very Short IntroductionÉvaluation : 4.5 sur 5 étoiles4.5/5 (12)
- The New 3D Layout for Oil & Gas Offshore Projects: How to ensure successD'EverandThe New 3D Layout for Oil & Gas Offshore Projects: How to ensure successÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- Handbook on Battery Energy Storage SystemD'EverandHandbook on Battery Energy Storage SystemÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)
- Nuclear Energy in the 21st Century: World Nuclear University PressD'EverandNuclear Energy in the 21st Century: World Nuclear University PressÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- Introduction to Power System ProtectionD'EverandIntroduction to Power System ProtectionPas encore d'évaluation
- Flow Analysis for Hydrocarbon Pipeline EngineeringD'EverandFlow Analysis for Hydrocarbon Pipeline EngineeringPas encore d'évaluation
- Produced Water Treatment Field ManualD'EverandProduced Water Treatment Field ManualÉvaluation : 4.5 sur 5 étoiles4.5/5 (5)
- Industrial Piping and Equipment Estimating ManualD'EverandIndustrial Piping and Equipment Estimating ManualÉvaluation : 5 sur 5 étoiles5/5 (7)
- The Rare Metals War: the dark side of clean energy and digital technologiesD'EverandThe Rare Metals War: the dark side of clean energy and digital technologiesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Oil and Gas Pipelines and Piping Systems: Design, Construction, Management, and InspectionD'EverandOil and Gas Pipelines and Piping Systems: Design, Construction, Management, and InspectionÉvaluation : 4.5 sur 5 étoiles4.5/5 (16)
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsD'EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsPas encore d'évaluation
- Energy, Light and Electricity - Introduction to Physics - Physics Book for 12 Year Old | Children's Physics BooksD'EverandEnergy, Light and Electricity - Introduction to Physics - Physics Book for 12 Year Old | Children's Physics BooksPas encore d'évaluation
- Transmission Pipeline Calculations and Simulations ManualD'EverandTransmission Pipeline Calculations and Simulations ManualÉvaluation : 4.5 sur 5 étoiles4.5/5 (10)
- Operational Amplifier Circuits: Analysis and DesignD'EverandOperational Amplifier Circuits: Analysis and DesignÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)
- ISO 50001: A strategic guide to establishing an energy management systemD'EverandISO 50001: A strategic guide to establishing an energy management systemPas encore d'évaluation
- Air-Cooled Condenser Fundamentals: Design, Operations, Troubleshooting, Maintenance, and Q&AD'EverandAir-Cooled Condenser Fundamentals: Design, Operations, Troubleshooting, Maintenance, and Q&AÉvaluation : 5 sur 5 étoiles5/5 (1)