Vous aimerez peut-être aussi
- Tertiary and Secondary Control Levels For Efficiency Optimization and System Damping in Droop Controlled DC-DC ConvertersDocument12 pagesTertiary and Secondary Control Levels For Efficiency Optimization and System Damping in Droop Controlled DC-DC ConvertersRiad TifaPas encore d'évaluation
- 10 1109@tie 2017 2698425 PDFDocument12 pages10 1109@tie 2017 2698425 PDFRiad TifaPas encore d'évaluation
- An Enhanced Droop Control Method For Accurate Load Sharing and Voltage Improvement of Isolated and Interconnected DC MicrogridsDocument11 pagesAn Enhanced Droop Control Method For Accurate Load Sharing and Voltage Improvement of Isolated and Interconnected DC MicrogridsRiad TifaPas encore d'évaluation
- Control Engineering Practice: Youssef Krim, Dhaker Abbes, Saber Krim, Mohamed Faouzi MimouniDocument16 pagesControl Engineering Practice: Youssef Krim, Dhaker Abbes, Saber Krim, Mohamed Faouzi MimouniRiad TifaPas encore d'évaluation
- Control Engineering Practice: Youssef Krim, Dhaker Abbes, Saber Krim, Mohamed Faouzi MimouniDocument16 pagesControl Engineering Practice: Youssef Krim, Dhaker Abbes, Saber Krim, Mohamed Faouzi MimouniRiad TifaPas encore d'évaluation
- 10 1109@tie 2017 2698425 PDFDocument12 pages10 1109@tie 2017 2698425 PDFRiad TifaPas encore d'évaluation
- 74 Adaptive Decentralized Droop ControllerDocument11 pages74 Adaptive Decentralized Droop ControllerRiad TifaPas encore d'évaluation
- 3 Maison PDFDocument6 pages3 Maison PDFRiad TifaPas encore d'évaluation
- 07418710Document4 pages07418710Riad TifaPas encore d'évaluation
- Design of Solar Water Pumping System With FCMA Soft StarterDocument4 pagesDesign of Solar Water Pumping System With FCMA Soft StarterRiad TifaPas encore d'évaluation
- Homer PaperDocument13 pagesHomer PaperRiad TifaPas encore d'évaluation
- Solar PV Array Fed Water Pumping Using BLDC Motor Drive With Boost-Buck ConverterDocument8 pagesSolar PV Array Fed Water Pumping Using BLDC Motor Drive With Boost-Buck ConverterRiad TifaPas encore d'évaluation
- WSN 672 2017 126 148 2Document24 pagesWSN 672 2017 126 148 2Amit DostPas encore d'évaluation
- ICREEC'2019: International Conference on Renewable Energy and Energy ConversionDocument2 pagesICREEC'2019: International Conference on Renewable Energy and Energy ConversionRiad TifaPas encore d'évaluation
- Economic Comparison of Solar PV and Diesel Water Pumping SystemDocument6 pagesEconomic Comparison of Solar PV and Diesel Water Pumping SystemRiad TifaPas encore d'évaluation
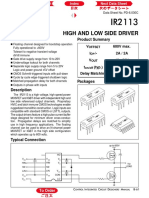
- High and Low Side Driver: Features Product SummaryDocument14 pagesHigh and Low Side Driver: Features Product SummaryMiguel GalvánPas encore d'évaluation
- Solar PV-Battery Based Hybrid Water Pumping System Using BLDC Motor DriveDocument6 pagesSolar PV-Battery Based Hybrid Water Pumping System Using BLDC Motor DriveRiad TifaPas encore d'évaluation
- 07038525Document6 pages07038525Riad TifaPas encore d'évaluation
- Air Source Heat Pump A Key Role in The Development of Smart Buildings in Future Energy SystemsDocument6 pagesAir Source Heat Pump A Key Role in The Development of Smart Buildings in Future Energy SystemsRiad TifaPas encore d'évaluation
- 07041977Document6 pages07041977Riad TifaPas encore d'évaluation
- Optoacoplador Integrado 4N25Document7 pagesOptoacoplador Integrado 4N25aureliocsPas encore d'évaluation
- Design and Simulation of A Photovoltaic Induction Motor Coupled Water Pumping SystemDocument8 pagesDesign and Simulation of A Photovoltaic Induction Motor Coupled Water Pumping SystemRiad TifaPas encore d'évaluation
- Modeling of A Number of Heat Pump Water Heaters As Control Equipment For Load Frequency Control in Power SystemsDocument7 pagesModeling of A Number of Heat Pump Water Heaters As Control Equipment For Load Frequency Control in Power SystemsRiad TifaPas encore d'évaluation
- High and Low Side Driver: Features Product SummaryDocument14 pagesHigh and Low Side Driver: Features Product SummaryMiguel GalvánPas encore d'évaluation
- IRFP460Document9 pagesIRFP460yusufwpPas encore d'évaluation
- Supplementary Load Frequency Control by Use of A Number of Both Electric Vehicles and Heat Pump Water HeatersDocument10 pagesSupplementary Load Frequency Control by Use of A Number of Both Electric Vehicles and Heat Pump Water HeatersRiad TifaPas encore d'évaluation
- Design and Simulation of A Photovoltaic Induction Motor Coupled Water Pumping SystemDocument8 pagesDesign and Simulation of A Photovoltaic Induction Motor Coupled Water Pumping SystemRiad TifaPas encore d'évaluation
- Performance Analysis of A Directly Coupled Photovoltaic Water-Pumping SystemDocument6 pagesPerformance Analysis of A Directly Coupled Photovoltaic Water-Pumping SystemRiad TifaPas encore d'évaluation
- Supplementary Load Frequency Control by Use of A Number of Both Electric Vehicles and Heat Pump Water HeatersDocument10 pagesSupplementary Load Frequency Control by Use of A Number of Both Electric Vehicles and Heat Pump Water HeatersRiad TifaPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Isbn Icosi2019 Final PDFDocument511 pagesIsbn Icosi2019 Final PDFyulianingsari pramesthiriniPas encore d'évaluation
- Breschi, Malerba, Orsenigo (2000) - Technological Regimes and Schumpeterian Patterns of InnovationDocument23 pagesBreschi, Malerba, Orsenigo (2000) - Technological Regimes and Schumpeterian Patterns of Innovationverdi rossiPas encore d'évaluation
- Object Oriented AnalysisDocument43 pagesObject Oriented AnalysisAbdela Aman MtechPas encore d'évaluation
- ಕ ಫ ಾಂಶ ಜ ೕವ / ಬ ವ / ಾ -೨೦೨೧. Vtu Provisional Results Of Ug / Pg January/ February / March -2021 ExaminationDocument1 pageಕ ಫ ಾಂಶ ಜ ೕವ / ಬ ವ / ಾ -೨೦೨೧. Vtu Provisional Results Of Ug / Pg January/ February / March -2021 Examination1SG20EE038 Yashaswini.SPas encore d'évaluation
- Library Books ListDocument8 pagesLibrary Books ListAnonymous TAhvs08CPas encore d'évaluation
- Rfi Report - For IcDocument5 pagesRfi Report - For IcGera Amith KumarPas encore d'évaluation
- UPSC IES Weightage For ECEDocument4 pagesUPSC IES Weightage For ECEPriyaKumar0% (1)
- Soil & Site Improvement GuideDocument10 pagesSoil & Site Improvement GuideFauzankalibataPas encore d'évaluation
- 2-1 Result R16Document260 pages2-1 Result R16chaitanya baikarPas encore d'évaluation
- Nzee Storage TanksDocument13 pagesNzee Storage Tanksvttrlc100% (1)
- ICTAD Procurement of Work ICTAD SBD 01 2007 PDFDocument110 pagesICTAD Procurement of Work ICTAD SBD 01 2007 PDFruwan88% (8)
- Relationship Between Tensile Strength and Hardness of A MaterialDocument2 pagesRelationship Between Tensile Strength and Hardness of A MaterialJigar M. UpadhyayPas encore d'évaluation
- IEEE Recommended Practice For Routine Impulse Test For Distribution TransformersDocument56 pagesIEEE Recommended Practice For Routine Impulse Test For Distribution TransformersIngTec2016 IngTec2016Pas encore d'évaluation
- Buildsmart 17issue35Document11 pagesBuildsmart 17issue35Yadanar LinPas encore d'évaluation
- Mechanical Engineerig Recommended BooksDocument4 pagesMechanical Engineerig Recommended BooksSandeepPas encore d'évaluation
- Certificate Sil 3 Assessment Report Topworx en 82490Document24 pagesCertificate Sil 3 Assessment Report Topworx en 82490Bibhu Ranjan MohantyPas encore d'évaluation
- Electrical Engineering DesignDocument25 pagesElectrical Engineering Designvarun2184100% (1)
- 02 Technical Folder Stora Enso Building Solutions CLTDocument325 pages02 Technical Folder Stora Enso Building Solutions CLTAurelia AxentePas encore d'évaluation
- LRFD Steel Design PDFDocument648 pagesLRFD Steel Design PDFbong2rmPas encore d'évaluation
- Advanced Course For Sap 2000Document2 pagesAdvanced Course For Sap 2000sudipPas encore d'évaluation
- OHSAS Project Group Survey Results for OH&S Standards and CertificatesDocument79 pagesOHSAS Project Group Survey Results for OH&S Standards and CertificatesAntony LouisPas encore d'évaluation
- Ee 332Document2 pagesEe 332सुमित नेमाPas encore d'évaluation
- ThesisDocument101 pagesThesisZaki Siddiqui100% (3)
- 9686-6130-ITP - 000-1002 - Inspection and Test Plan For General Civil Works Rev A1Document34 pages9686-6130-ITP - 000-1002 - Inspection and Test Plan For General Civil Works Rev A1anil pk100% (8)
- Report Petronas TowerDocument32 pagesReport Petronas TowerSahil DhirPas encore d'évaluation
- CV Muhammad Bilal Material InspectorDocument3 pagesCV Muhammad Bilal Material InspectorbilalPas encore d'évaluation
- Underpinning Methods, Procedure and ApplicationsDocument10 pagesUnderpinning Methods, Procedure and ApplicationsShivaun Seecharan0% (1)
- JESAUN - Volume 42 - Issue No 5 - Pages 1179-1192Document14 pagesJESAUN - Volume 42 - Issue No 5 - Pages 1179-1192Mohamed HassanPas encore d'évaluation
- UESI Presentation Webinar March 29 2016 PDFDocument65 pagesUESI Presentation Webinar March 29 2016 PDFmunim87Pas encore d'évaluation
- Iti PDFDocument1 pageIti PDFNvpress KohimaPas encore d'évaluation