Vous aimerez peut-être aussi
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Safety Data Sheet: Section 1. IdentificationDocument12 pagesSafety Data Sheet: Section 1. IdentificationNeelakanta KallaPas encore d'évaluation
- Dream The Convergence Future With Drone and Iot Technology: Ground Control SystemDocument2 pagesDream The Convergence Future With Drone and Iot Technology: Ground Control SystemNeelakanta Kalla100% (1)
- ATmega4208 09 DS80000867CDocument17 pagesATmega4208 09 DS80000867CNeelakanta KallaPas encore d'évaluation
- Opencpu: GCC Installation GuideDocument17 pagesOpencpu: GCC Installation GuideNeelakanta KallaPas encore d'évaluation
- Mastering Arduinojson 6: Efficient Json Serialization For Embedded C++Document39 pagesMastering Arduinojson 6: Efficient Json Serialization For Embedded C++Neelakanta KallaPas encore d'évaluation
- Elsie ManualDocument132 pagesElsie ManualNeelakanta KallaPas encore d'évaluation
- Quotation For Home Automation FormatDocument2 pagesQuotation For Home Automation FormatNeelakanta KallaPas encore d'évaluation
- Disclosure To Promote The Right To InformationDocument19 pagesDisclosure To Promote The Right To InformationNeelakanta KallaPas encore d'évaluation
- 5 Wire Curtain MotorDocument1 page5 Wire Curtain MotorNeelakanta KallaPas encore d'évaluation
- 13 2laserradars3d PDFDocument20 pages13 2laserradars3d PDFNeelakanta KallaPas encore d'évaluation
- Design and Simulation of Two Phase Interleaved Buck ConverterDocument8 pagesDesign and Simulation of Two Phase Interleaved Buck ConverterNeelakanta KallaPas encore d'évaluation
- A Pilot Study On The Human by Low Frequency Noise: Body Vibration InducedDocument8 pagesA Pilot Study On The Human by Low Frequency Noise: Body Vibration InducedNeelakanta KallaPas encore d'évaluation
- Tak Tsy Stech BriefDocument2 pagesTak Tsy Stech BriefNeelakanta KallaPas encore d'évaluation
- Si-RS485 MODBUSDocument4 pagesSi-RS485 MODBUSNeelakanta KallaPas encore d'évaluation
- NityaSSIPL Ind Acad Bridge ProgDocument2 pagesNityaSSIPL Ind Acad Bridge ProgNeelakanta KallaPas encore d'évaluation
- CB Insights - Amazon Strategy Teardown PDFDocument23 pagesCB Insights - Amazon Strategy Teardown PDFNeelakanta KallaPas encore d'évaluation
- CAN FD For Different StakeholdersDocument7 pagesCAN FD For Different StakeholdersNeelakanta KallaPas encore d'évaluation
- IEC Standards For EV ChargingDocument15 pagesIEC Standards For EV ChargingNeelakanta Kalla100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Properties of Building Materials and Their Importance in ConstructionDocument5 pagesProperties of Building Materials and Their Importance in ConstructionDaisy Jane LulabPas encore d'évaluation
- Carte Tehnicădetector Metale GarretDocument53 pagesCarte Tehnicădetector Metale Garretely_ely3395Pas encore d'évaluation
- Problem 1-4Document6 pagesProblem 1-4Anonymous xIzzEifjPPas encore d'évaluation
- Phys114 Ps 1Document11 pagesPhys114 Ps 1Reine Amabel JarudaPas encore d'évaluation
- DFM54 EngDocument2 pagesDFM54 EngAnonymous KWO434Pas encore d'évaluation
- Simple and Compound Gear TrainDocument2 pagesSimple and Compound Gear TrainHendri Yoga SaputraPas encore d'évaluation
- Introduction Compression TestDocument7 pagesIntroduction Compression TestEr Dinesh TambePas encore d'évaluation
- Surveying Civil Engineering Pictorial Booklet 15 English MediumDocument125 pagesSurveying Civil Engineering Pictorial Booklet 15 English MediumtnstcnpalanisamyPas encore d'évaluation
- Acids and Bases Part 3 (Weak Acids) EdexcelDocument2 pagesAcids and Bases Part 3 (Weak Acids) EdexcelKevin The Chemistry TutorPas encore d'évaluation
- Velocloud OverviewDocument29 pagesVelocloud OverviewFebri RawlinsPas encore d'évaluation
- Form WorkDocument12 pagesForm Workdharul khairPas encore d'évaluation
- Hyundai Robex 220LC-9A SpecificationsDocument14 pagesHyundai Robex 220LC-9A SpecificationsKundan DhurvePas encore d'évaluation
- Brochure sp761lfDocument10 pagesBrochure sp761lfkathy fernandezPas encore d'évaluation
- LN3 Geng2340Document61 pagesLN3 Geng2340Seth VineetPas encore d'évaluation
- OTM Reports FTI Training ManualDocument78 pagesOTM Reports FTI Training ManualAquib Khan100% (2)
- Content Beyond SyllabusDocument3 pagesContent Beyond SyllabusRahul PolPas encore d'évaluation
- Conjoint SpssDocument28 pagesConjoint SpssstatsoumyaPas encore d'évaluation
- RSA Code in JavaDocument3 pagesRSA Code in Javadeepak00707Pas encore d'évaluation
- DO 178 B Brief NotesDocument18 pagesDO 178 B Brief NotesMani Shankar PrasadPas encore d'évaluation
- As4e-Ide-2 7 0 851-ReadmeDocument10 pagesAs4e-Ide-2 7 0 851-ReadmeManoj SharmaPas encore d'évaluation
- Lab Manual 11 Infrared SpectrosDocument5 pagesLab Manual 11 Infrared SpectrosLuca Selva CampobassoPas encore d'évaluation
- Elvax 460Document3 pagesElvax 460ingindjorimaPas encore d'évaluation
- Connection DiagramsDocument3 pagesConnection Diagramsfahad pirzadaPas encore d'évaluation
- TIL 1881 Network Security TIL For Mark VI Controller Platform PDFDocument11 pagesTIL 1881 Network Security TIL For Mark VI Controller Platform PDFManuel L LombarderoPas encore d'évaluation
- JAVA Stack Installation in ERPDocument2 pagesJAVA Stack Installation in ERPsai_balaji_8Pas encore d'évaluation
- Experiment SCDocument5 pagesExperiment SCnitinmgPas encore d'évaluation
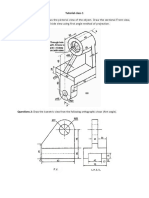
- Tutorial Class 1 Questions 1Document2 pagesTutorial Class 1 Questions 1Bố Quỳnh ChiPas encore d'évaluation
- Economics BasisDocument14 pagesEconomics BasiskumarPas encore d'évaluation
- Sd-1-Parts-Book Manual Propietario SpreaderDocument30 pagesSd-1-Parts-Book Manual Propietario Spreadergabriel sanchezPas encore d'évaluation
- 2nd Term Physics ReviewerDocument5 pages2nd Term Physics ReviewerAlfredo L. CariasoPas encore d'évaluation