Vous aimerez peut-être aussi
- Serie Analítica Web Artículo 2 de 5 Gemma MuñozDocument6 pagesSerie Analítica Web Artículo 2 de 5 Gemma MuñozAaron RodriguezPas encore d'évaluation
- Presentación Cifras I-2022Document36 pagesPresentación Cifras I-2022Aaron RodriguezPas encore d'évaluation
- Analitica Web Las Personas Mienten Las Pruebas No Gemma MuñozDocument32 pagesAnalitica Web Las Personas Mienten Las Pruebas No Gemma MuñozAaron RodriguezPas encore d'évaluation
- Analitica y Metrica de La Web Gemma MuñozDocument119 pagesAnalitica y Metrica de La Web Gemma MuñozAaron RodriguezPas encore d'évaluation
- Serie Analítica Web Artículo 3 de 5 Gemma MuñozDocument8 pagesSerie Analítica Web Artículo 3 de 5 Gemma MuñozAaron RodriguezPas encore d'évaluation
- Desde Que Se Cronometran Las Carreras, Se Corre Mas Rapido Gemma MuñozDocument25 pagesDesde Que Se Cronometran Las Carreras, Se Corre Mas Rapido Gemma MuñozAaron RodriguezPas encore d'évaluation
- Manual ShotcutDocument17 pagesManual ShotcutmediolimonPas encore d'évaluation
- Instrucciones ZoomltDocument4 pagesInstrucciones ZoomltAaron RodriguezPas encore d'évaluation
- Serie Analítica Web Artículo 1 de 5 Gemma MuñozDocument6 pagesSerie Analítica Web Artículo 1 de 5 Gemma MuñozAaron RodriguezPas encore d'évaluation
- Guía de Formularios de Google - Todo Lo Que Necesita para Crear Formularios Geniales de Forma Gratuita - La Guía Definitiva para Las Hojas de Cálculo de Google - Zapier PDFDocument36 pagesGuía de Formularios de Google - Todo Lo Que Necesita para Crear Formularios Geniales de Forma Gratuita - La Guía Definitiva para Las Hojas de Cálculo de Google - Zapier PDFAaron RodriguezPas encore d'évaluation
- Manual ShotcutDocument17 pagesManual ShotcutmediolimonPas encore d'évaluation
- CarpinteriaDocument55 pagesCarpinteriaAaron RodriguezPas encore d'évaluation
- Prueba de Traduccion Google PDFDocument22 pagesPrueba de Traduccion Google PDFAaron RodriguezPas encore d'évaluation
- Manual ShotcutDocument17 pagesManual ShotcutmediolimonPas encore d'évaluation
- ManualGIMP Cap1Document25 pagesManualGIMP Cap1carmenPas encore d'évaluation
- Plantilla para Editar Ebooks Con Sigil (Celia Añó)Document3 pagesPlantilla para Editar Ebooks Con Sigil (Celia Añó)Aaron RodriguezPas encore d'évaluation
- Como Crear Un Epub Con Sigil AlumnosDocument36 pagesComo Crear Un Epub Con Sigil AlumnosJavier Estrela MonrealPas encore d'évaluation
- Taller AerografíaDocument3 pagesTaller AerografíaAaron RodriguezPas encore d'évaluation
- Maquetar Un Ebook Con Sigil (Celia Añó)Document15 pagesMaquetar Un Ebook Con Sigil (Celia Añó)Aaron RodriguezPas encore d'évaluation
- Estilos CSS para Sigil (Celia Añó)Document8 pagesEstilos CSS para Sigil (Celia Añó)Aaron RodriguezPas encore d'évaluation
- Calendario 2018Document13 pagesCalendario 2018Aaron RodriguezPas encore d'évaluation
- Mc831 Critica A HarveyDocument25 pagesMc831 Critica A HarveyAaron RodriguezPas encore d'évaluation
- INF 2014 44 Anime BrilloDocument171 pagesINF 2014 44 Anime BrilloAaron RodriguezPas encore d'évaluation
- HTML y Css Basico para Hacer Epub2 Con SigilDocument56 pagesHTML y Css Basico para Hacer Epub2 Con SigilAaron Rodriguez100% (1)
- 01ManualGIMP Cap1Document25 pages01ManualGIMP Cap1Aaron RodriguezPas encore d'évaluation
- Calendario 2-2012Document1 pageCalendario 2-2012Aaron RodriguezPas encore d'évaluation
- Manual Lavatorre Use and Care Guide COL Torres de Lavado V2 1Document32 pagesManual Lavatorre Use and Care Guide COL Torres de Lavado V2 1Ana Virginia FernándezPas encore d'évaluation
- APLICACIONESDocument4 pagesAPLICACIONESJavier Enrique Hurtado DiazPas encore d'évaluation
- Transfer Word - Calc - HpUser EditDocument0 pageTransfer Word - Calc - HpUser EditKlinsman AráozPas encore d'évaluation
- Manual 1 - Manipulación de Archivos en Una HP50GDocument5 pagesManual 1 - Manipulación de Archivos en Una HP50GGuillermo Delgado Castillo67% (3)
- Mitología Griega 2Document17 pagesMitología Griega 2Carlos Armando CamposPas encore d'évaluation
- Tromp EtaDocument71 pagesTromp Etaalfonso1510Pas encore d'évaluation
- CapitelDocument4 pagesCapitelClaudia Janco FloresPas encore d'évaluation
- ALGEBRA VECTORIAL UNPRG Ciclo 2013-IDocument4 pagesALGEBRA VECTORIAL UNPRG Ciclo 2013-IJosé Eduardo MillonesPas encore d'évaluation
- Cuatro Preguntas BambucoDocument3 pagesCuatro Preguntas BambucoadalbassPas encore d'évaluation
- La Media Vuelta PDFDocument1 pageLa Media Vuelta PDFDanny AG0% (1)
- Examen Platón Selectividad, Victoria Gómez 2ºCDocument3 pagesExamen Platón Selectividad, Victoria Gómez 2ºCFilosofica100% (1)
- Como Afecta La Contaminación de Flora y FaunaDocument11 pagesComo Afecta La Contaminación de Flora y FaunaAlejandro PerezPas encore d'évaluation
- 2015 - CV Kovács Béla en EspañolDocument2 pages2015 - CV Kovács Béla en EspañolDiegoCayuelasPas encore d'évaluation
- SMANM2001LIB01Document4 pagesSMANM2001LIB01Ricardo GutierrezPas encore d'évaluation
- Consideraciones Antes de Crear Un Servidor o Elemental ArtificialDocument10 pagesConsideraciones Antes de Crear Un Servidor o Elemental Artificiald97100% (1)
- Antigua GreciaDocument9 pagesAntigua GreciaEduardo Ortiz TrujilloPas encore d'évaluation
- Hornpipe - HandelDocument1 pageHornpipe - HandelReynaldo Moyses Jr.Pas encore d'évaluation
- 3 AdivinanzasDocument6 pages3 AdivinanzasGabriel GarciaPas encore d'évaluation
- Catalogo Musica PDFDocument4 663 pagesCatalogo Musica PDFPablo MitilineosPas encore d'évaluation
- El Caballo de TroyaDocument3 pagesEl Caballo de TroyaMarc ReyesPas encore d'évaluation
- Cuadernillo Latin PDFDocument38 pagesCuadernillo Latin PDFguillermoisedetPas encore d'évaluation
- Teoría de La Música PDFDocument150 pagesTeoría de La Música PDFCaleb Perez OrtizPas encore d'évaluation
- Acta de Entrega de Instrumentos MusicalesDocument7 pagesActa de Entrega de Instrumentos MusicalesOvelio RodriguezPas encore d'évaluation
- CatsDocument16 pagesCatsceronenaPas encore d'évaluation
- Guion de HerculesDocument14 pagesGuion de HerculesPriscila Ochoa LeonPas encore d'évaluation
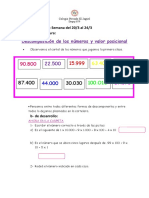
- Descomposición de Los Números y Valor Posicional: Actividades: Semana Del 20/3 Al 24/3 A-De AperturaDocument9 pagesDescomposición de Los Números y Valor Posicional: Actividades: Semana Del 20/3 Al 24/3 A-De AperturaValentina PeronacePas encore d'évaluation
- Ruben Darío Los CisnesDocument4 pagesRuben Darío Los CisnesombligodepescadoPas encore d'évaluation
- Orígenes de La GeometríaDocument3 pagesOrígenes de La GeometríaAnonymous MFi9MDPas encore d'évaluation
- Jerarquía EspacialDocument2 pagesJerarquía EspacialDavid ChacaliazaPas encore d'évaluation
- CantataDocument10 pagesCantataDavid Absurdum100% (1)
- Reporte de Lectura 1 Temas Del CantoDocument8 pagesReporte de Lectura 1 Temas Del CantoHno Misael Osb Hernández DurónPas encore d'évaluation
- 3° M. El Arbol Del JazzDocument4 pages3° M. El Arbol Del JazzChristianDiaz100% (2)
- Resumen Linaje de ZeusDocument5 pagesResumen Linaje de ZeusJulio César Mora DPas encore d'évaluation
- Comentario de Audición Puer NatusDocument7 pagesComentario de Audición Puer NatusEmili Gil TomasPas encore d'évaluation