Vous aimerez peut-être aussi
- Mine Black Book ProjectDocument47 pagesMine Black Book ProjectHemal VyasPas encore d'évaluation
- Training Report Indian Meteorological DepartmentDocument21 pagesTraining Report Indian Meteorological DepartmentPrashant SinghPas encore d'évaluation
- Project Report (FMCD Final)Document31 pagesProject Report (FMCD Final)PRATICK RANJAN GAYEN100% (1)
- Recruitment and Selection at Reliance LICDocument66 pagesRecruitment and Selection at Reliance LICRohit KashyapPas encore d'évaluation
- Cost of Capital NumericalsDocument9 pagesCost of Capital Numericalsckcnathan001Pas encore d'évaluation
- How Did Andhra Bank Scale-Up Its Microfinance Programme?Document2 pagesHow Did Andhra Bank Scale-Up Its Microfinance Programme?Suchetana AdhikaryPas encore d'évaluation
- Ramu Final ProjectDocument75 pagesRamu Final ProjectJayanth.75% (4)
- Final Project Management ReportDocument99 pagesFinal Project Management Reportapi-413317854Pas encore d'évaluation
- A Summer Internship Report On Study of CDocument3 pagesA Summer Internship Report On Study of CVarshik FlashPas encore d'évaluation
- Public Access - The GauntletDocument1 pagePublic Access - The GauntletTesting0% (2)
- Ubi Caritas Guitar Solo Arrangement by Patrick Glenn BalanzaDocument8 pagesUbi Caritas Guitar Solo Arrangement by Patrick Glenn BalanzaPatrick Glenn BalanzaPas encore d'évaluation
- Homomorphic FilteringDocument16 pagesHomomorphic FilteringK.R.Raguram100% (3)
- Comparative Study of The Public Sector Amp Private Sector BankDocument73 pagesComparative Study of The Public Sector Amp Private Sector BanksumanPas encore d'évaluation
- Priyanshu Project ReportDocument69 pagesPriyanshu Project ReportRaghvendra Pratap SinghPas encore d'évaluation
- Presentation On Salient Features of The Electricity Act 2003 1231332387635957 1Document14 pagesPresentation On Salient Features of The Electricity Act 2003 1231332387635957 1Anonymous m8oCtJBPas encore d'évaluation
- E-Banking Advantages & DisadvantagesDocument35 pagesE-Banking Advantages & DisadvantagesVivek GamdhaPas encore d'évaluation
- Invertis B Com Project 2016Document54 pagesInvertis B Com Project 2016shobhitPas encore d'évaluation
- Mobile Service Operator QuestionnaireDocument3 pagesMobile Service Operator QuestionnaireAmit100% (5)
- Mahindra Bolero - RM FinalDocument38 pagesMahindra Bolero - RM FinalanuragkamPas encore d'évaluation
- Consumer Behaviour Towards Four Wheeler: With Special Reference To Hyundai CarsDocument21 pagesConsumer Behaviour Towards Four Wheeler: With Special Reference To Hyundai CarskumardattPas encore d'évaluation
- Indian Financial SystemDocument23 pagesIndian Financial SystemSujeet KhadePas encore d'évaluation
- Airtel Vs BSNL - MarketingDocument98 pagesAirtel Vs BSNL - MarketingSami ZamaPas encore d'évaluation
- MarketingDocument15 pagesMarketingjitendra.jgec8525Pas encore d'évaluation
- Camel Analysis India RankingDocument15 pagesCamel Analysis India RankingAmnaPas encore d'évaluation
- A Study On Material Control TechniqusDocument55 pagesA Study On Material Control Techniquskathirvelmba100% (1)
- Certificate ICICIDocument1 pageCertificate ICICISaurabh Kumar100% (1)
- Consumer Satisfaction of Pathao: A Study Through University Level Students of BangladeshDocument40 pagesConsumer Satisfaction of Pathao: A Study Through University Level Students of BangladeshNatasha JarinPas encore d'évaluation
- MJ Customer Satisfaction of BSNL ProductsDocument97 pagesMJ Customer Satisfaction of BSNL ProductsMOHIT KASHYAP100% (1)
- BankingDocument101 pagesBankingvipul5290Pas encore d'évaluation
- Computer Graphics - Visible Surface DetectionDocument15 pagesComputer Graphics - Visible Surface DetectionSyedkareem_hkgPas encore d'évaluation
- Awareness of E-Banking Services Among Rural CustomersDocument10 pagesAwareness of E-Banking Services Among Rural CustomersInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Comparative Analysis of State Bank of India With Other Credit SchemesDocument97 pagesComparative Analysis of State Bank of India With Other Credit SchemesVKM2013Pas encore d'évaluation
- Mini Project (Synopsis)Document23 pagesMini Project (Synopsis)Akshar MishraPas encore d'évaluation
- Research ProposalDocument3 pagesResearch ProposalAniket GangurdePas encore d'évaluation
- Camel ResearchDocument62 pagesCamel ResearchPuja AwasthiPas encore d'évaluation
- Introduction of E BankingDocument31 pagesIntroduction of E BankingMehul ChauhanPas encore d'évaluation
- Iapm Assignment 38Document8 pagesIapm Assignment 38Selvin DisouzaPas encore d'évaluation
- A Comparative Study of Telecommunication Service Providers BSNL and Airtel Operating in Gwalior Division IndiaDocument8 pagesA Comparative Study of Telecommunication Service Providers BSNL and Airtel Operating in Gwalior Division IndiaTJPRC Publications50% (2)
- MK Retail Full Research Project Till 6th ChapDocument90 pagesMK Retail Full Research Project Till 6th ChapAbhinand V100% (1)
- Smart Highway Navigation System Using Light Fidelity TechnologyDocument16 pagesSmart Highway Navigation System Using Light Fidelity Technologyutkarsh dwivedi100% (1)
- Banking ProjectDocument44 pagesBanking ProjectDeepak Dutt0% (1)
- Introduction of E CommerceDocument2 pagesIntroduction of E CommerceAkanksha KadamPas encore d'évaluation
- 80 Pages ProjectDocument80 pages80 Pages ProjectR AdenwalaPas encore d'évaluation
- Investment Behaviour of College TeachersDocument62 pagesInvestment Behaviour of College TeachersAlok MonayPas encore d'évaluation
- Industry Analysis: Desk Research Banking IndustryDocument66 pagesIndustry Analysis: Desk Research Banking IndustryAniket MankarPas encore d'évaluation
- Impact of Reliance Jio On Indian Telecom IndustryDocument21 pagesImpact of Reliance Jio On Indian Telecom IndustryLoveleen GargPas encore d'évaluation
- Internship Report On Customer Relationship Management of VMCDocument69 pagesInternship Report On Customer Relationship Management of VMCJason Jason100% (1)
- Summer Training Report Trends and Practices of HDFC Bank:-Retail Abnking Conducted at HDFC BANK, Ambala CityDocument104 pagesSummer Training Report Trends and Practices of HDFC Bank:-Retail Abnking Conducted at HDFC BANK, Ambala Cityjs60564Pas encore d'évaluation
- Chapter IIDocument13 pagesChapter IIeshu100% (1)
- E Banking Consumer BehaviourDocument116 pagesE Banking Consumer Behaviourrevahykrish93Pas encore d'évaluation
- E-Banking Challenges and OpportunitiesDocument17 pagesE-Banking Challenges and Opportunitiesmohan_killer100% (1)
- Data and Message SecurityDocument13 pagesData and Message SecurityAkshay Mishra100% (1)
- Ad Mad Show CompetitionDocument17 pagesAd Mad Show CompetitionSaurabh JainPas encore d'évaluation
- Customer Satisifaction Towards Mobileservice ProvidersDocument63 pagesCustomer Satisifaction Towards Mobileservice Providerskarthik chilamantula100% (2)
- A Study On Customer Satisfaction Towards BSNL ServicesDocument66 pagesA Study On Customer Satisfaction Towards BSNL ServicesSami ZamaPas encore d'évaluation
- Raw Material Assistance To The Small Scale Industries Finance NSIC NEWDocument89 pagesRaw Material Assistance To The Small Scale Industries Finance NSIC NEWChandramohan Jaiswal0% (2)
- C SectionDocument16 pagesC SectionPayalPas encore d'évaluation
- Unit-2 Image ProcessingDocument9 pagesUnit-2 Image ProcessingAkash YadavPas encore d'évaluation
- Question Bank For B.tech CS 7 Digital Image ProcessingDocument52 pagesQuestion Bank For B.tech CS 7 Digital Image ProcessingDesi babaPas encore d'évaluation
- Combined Approach For Image SegmentationDocument4 pagesCombined Approach For Image SegmentationseventhsensegroupPas encore d'évaluation
- DIP NotesDocument22 pagesDIP NotesSuman RoyPas encore d'évaluation
- Image Enhancement: Computer Vision CITS4240Document12 pagesImage Enhancement: Computer Vision CITS4240Vrundan PatelPas encore d'évaluation
- Nutrition Great Foods For Getting Vitamins A To K in Your DietDocument1 pageNutrition Great Foods For Getting Vitamins A To K in Your DietDhruv DuaPas encore d'évaluation
- Toxemias of PregnancyDocument3 pagesToxemias of PregnancyJennelyn LumbrePas encore d'évaluation
- Ed Post Lab Heat of Formation of NaClDocument4 pagesEd Post Lab Heat of Formation of NaClEdimar ManlangitPas encore d'évaluation
- CSEC SocStud CoverSheetForESBA Fillable Dec2019Document1 pageCSEC SocStud CoverSheetForESBA Fillable Dec2019chrissainePas encore d'évaluation
- Presentation Municipal Appraisal CommitteeDocument3 pagesPresentation Municipal Appraisal CommitteeEdwin JavatePas encore d'évaluation
- Final Prmy Gr4 Math Ph1 HWSHDocument55 pagesFinal Prmy Gr4 Math Ph1 HWSHKarthik KumarPas encore d'évaluation
- Blake 2013Document337 pagesBlake 2013Tushar AmetaPas encore d'évaluation
- Tree PruningDocument15 pagesTree Pruningrita44Pas encore d'évaluation
- Health and Safety For The Meat Industry: Guidance NotesDocument198 pagesHealth and Safety For The Meat Industry: Guidance NotesPredrag AndjelkovicPas encore d'évaluation
- Properties of LiquidsDocument26 pagesProperties of LiquidsRhodora Carias LabaneroPas encore d'évaluation
- Morse Potential CurveDocument9 pagesMorse Potential Curvejagabandhu_patraPas encore d'évaluation
- #Angles Are in Degrees: EGR2313 HW SOLUTIONS (2021)Document4 pages#Angles Are in Degrees: EGR2313 HW SOLUTIONS (2021)SolomonPas encore d'évaluation
- LRAD Datasheet 2000XDocument2 pagesLRAD Datasheet 2000XOkkar MaungPas encore d'évaluation
- Applied Physics (PHY-102) Course OutlineDocument3 pagesApplied Physics (PHY-102) Course OutlineMuhammad RafayPas encore d'évaluation
- 3M 309 MSDSDocument6 pages3M 309 MSDSLe Tan HoaPas encore d'évaluation
- Mule 4 Error Handling DemystifiedDocument8 pagesMule 4 Error Handling DemystifiedNicolas boulangerPas encore d'évaluation
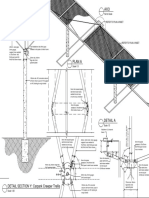
- ARC-232, Material Construction 2Document4 pagesARC-232, Material Construction 2danishali1090Pas encore d'évaluation
- ThaneDocument2 pagesThaneAkansha KhaitanPas encore d'évaluation
- Asus Test ReportDocument4 pagesAsus Test ReportFerry RiantoPas encore d'évaluation
- TrellisDocument1 pageTrellisCayenne LightenPas encore d'évaluation
- Bajaj CNSDocument3 pagesBajaj CNSAbhijit PaikarayPas encore d'évaluation
- Frequency Response For Control System Analysis - GATE Study Material in PDFDocument7 pagesFrequency Response For Control System Analysis - GATE Study Material in PDFNarendra AgrawalPas encore d'évaluation
- Use of Travelling Waves Principle in Protection Systems and Related AutomationsDocument52 pagesUse of Travelling Waves Principle in Protection Systems and Related AutomationsUtopia BogdanPas encore d'évaluation
- Specialty Coffee Association of Indonesia Cupping Form (ARABICA)Document1 pageSpecialty Coffee Association of Indonesia Cupping Form (ARABICA)Saiffullah RaisPas encore d'évaluation
- Bigbazaar PDFDocument14 pagesBigbazaar PDFazhagu sundaramPas encore d'évaluation
- Karthik ResumeDocument2 pagesKarthik ResumeArun Raj APas encore d'évaluation
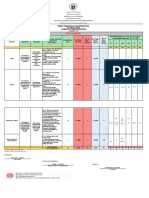
- Revised Final Quarter 1 Tos-Rbt-Sy-2022-2023 Tle-Cookery 10Document6 pagesRevised Final Quarter 1 Tos-Rbt-Sy-2022-2023 Tle-Cookery 10May Ann GuintoPas encore d'évaluation
- Neelima A Kulkarni ResumeDocument3 pagesNeelima A Kulkarni ResumeAcademics LecturenotesPas encore d'évaluation