Vous aimerez peut-être aussi
- Aprese8 Conversor DADocument29 pagesAprese8 Conversor DAalan_smoPas encore d'évaluation
- Fluxo LogísticoDocument1 pageFluxo Logísticoalan_smoPas encore d'évaluation
- PLL - Phase Locked Loops - Malha fechada por faseDocument8 pagesPLL - Phase Locked Loops - Malha fechada por fasealan_smoPas encore d'évaluation
- Aprese81 Conversor ADDocument26 pagesAprese81 Conversor ADalan_smoPas encore d'évaluation
- Roteiro MCC v2Document1 pageRoteiro MCC v2alan_smoPas encore d'évaluation
- Artigo Ace (Rev00)Document3 pagesArtigo Ace (Rev00)alan_smoPas encore d'évaluation
- Aprese4 MultivibradoresDocument23 pagesAprese4 Multivibradoresalan_smoPas encore d'évaluation
- Aprese8 Conversor DADocument29 pagesAprese8 Conversor DAalan_smoPas encore d'évaluation
- Apresentação 5 - Geradores de SinaisDocument75 pagesApresentação 5 - Geradores de SinaisRenatoAlmeidaPas encore d'évaluation
- Gabarito PSC 2015 2Document2 pagesGabarito PSC 2015 2alan_smoPas encore d'évaluation
- Aprese2 MultiplicadoresDocument12 pagesAprese2 Multiplicadoresalan_smoPas encore d'évaluation
- Fluxo de EnergiaDocument1 pageFluxo de Energiaalan_smoPas encore d'évaluation
- Aprese3 MoDemDocument26 pagesAprese3 MoDemalan_smoPas encore d'évaluation
- Aplicacoes Especiais de Amplificadores Operacionais Vincence UdescDocument0 pageAplicacoes Especiais de Amplificadores Operacionais Vincence UdescleandroparkerPas encore d'évaluation
- Parametros DH PDFDocument3 pagesParametros DH PDFalan_smoPas encore d'évaluation
- Algoritmo de Denavit-Hartenberg para modelagem cinemática de robôsDocument1 pageAlgoritmo de Denavit-Hartenberg para modelagem cinemática de robôsalan_smoPas encore d'évaluation
- Gabarito Da 2 Prova 1Document2 pagesGabarito Da 2 Prova 1alan_smoPas encore d'évaluation
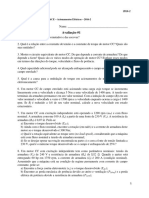
- Motor CC avaliação 1Document3 pagesMotor CC avaliação 1alan_smoPas encore d'évaluation
- Bônus - Avaliação 2Document3 pagesBônus - Avaliação 2alan_smoPas encore d'évaluation
- Gabarito Da 2 Prova 1Document2 pagesGabarito Da 2 Prova 1alan_smoPas encore d'évaluation
- Tabela de Comandos MATLABDocument4 pagesTabela de Comandos MATLABalan_smoPas encore d'évaluation
- Question Rio para ProvaDocument8 pagesQuestion Rio para Provaalan_smoPas encore d'évaluation
- Ter Ce Ira ProvaDocument2 pagesTer Ce Ira Provaalan_smoPas encore d'évaluation
- Plano de Ensino AS2ROB1 2015 2Document3 pagesPlano de Ensino AS2ROB1 2015 2alan_smoPas encore d'évaluation
- MarketingVerde PDFDocument18 pagesMarketingVerde PDFalan_smoPas encore d'évaluation
- Algoritmo de Denavit-Hartenberg para modelagem cinemática de robôsDocument1 pageAlgoritmo de Denavit-Hartenberg para modelagem cinemática de robôsalan_smoPas encore d'évaluation
- Parametros DHDocument3 pagesParametros DHalan_smoPas encore d'évaluation
- 20 Localizacao Espacial PDFDocument50 pages20 Localizacao Espacial PDFalan_smoPas encore d'évaluation
- Ter Ce Ira ProvaDocument2 pagesTer Ce Ira Provaalan_smoPas encore d'évaluation
- Implementação de um compilador PascalDocument123 pagesImplementação de um compilador PascalLaurindo PanzoPas encore d'évaluation
- DDL DML banco dados definir manipularDocument21 pagesDDL DML banco dados definir manipularValtinhoPas encore d'évaluation
- Evk 214 N2Document7 pagesEvk 214 N2Mauricioss2313 Soares100% (2)
- Curso Livre - AutoCAD 2018 - Professional - Senac São PauloDocument3 pagesCurso Livre - AutoCAD 2018 - Professional - Senac São PauloDenner Melo FreitasPas encore d'évaluation
- List A 2Document4 pagesList A 2José Luiz Rybarczyk FilhoPas encore d'évaluation
- Bola MurchaDocument9 pagesBola MurchaClaudeci AraújoPas encore d'évaluation
- Uma visão do DMBOKDocument46 pagesUma visão do DMBOKEveraldo ChavesPas encore d'évaluation
- Manual de Instruções TopAcesso - MP04801-01Document264 pagesManual de Instruções TopAcesso - MP04801-01paivapaivaPas encore d'évaluation
- Banco de Dados I - Transações e Controle de ConcorrênciaDocument39 pagesBanco de Dados I - Transações e Controle de Concorrênciamfomoura1Pas encore d'évaluation
- Algebra BooleanaDocument3 pagesAlgebra BooleanaSamuel RibeiroPas encore d'évaluation
- Informática Aplicada à ModaDocument47 pagesInformática Aplicada à ModaRejane WronowskiPas encore d'évaluation
- Slides01 DesenvolvimentoWebDocument43 pagesSlides01 DesenvolvimentoWebFelipe TardivoPas encore d'évaluation
- Resident Evil 1 Jill Valentine Parte 1Document15 pagesResident Evil 1 Jill Valentine Parte 1DavidPas encore d'évaluation
- Controlador de Válvula Digital FIELDVUE DVC6200 Da Fisher: ÍndiceDocument108 pagesControlador de Válvula Digital FIELDVUE DVC6200 Da Fisher: ÍndiceRicardo RodriguesPas encore d'évaluation
- SISTEMAS GERENCIAIS E PROCESSOSDocument5 pagesSISTEMAS GERENCIAIS E PROCESSOSSilvanoPas encore d'évaluation
- AR F.21 - Lista de Partidas em Aberto Do ClienteDocument4 pagesAR F.21 - Lista de Partidas em Aberto Do ClienteValdevy PiresPas encore d'évaluation
- Peças Sulcador Beija-FlorDocument7 pagesPeças Sulcador Beija-FlorVadinho BenezPas encore d'évaluation
- Grade Curricular Direito USP PDFDocument1 pageGrade Curricular Direito USP PDFpgn999Pas encore d'évaluation
- Histórico AvantsecDocument9 pagesHistórico AvantsecJSALES MDRPas encore d'évaluation
- Como Aplicar A LGPD em Sua Organização - Sandro OliveiraDocument250 pagesComo Aplicar A LGPD em Sua Organização - Sandro OliveiraThiago Mele Marketing DigitalPas encore d'évaluation
- Cronograma Da OBMEP - Documentos GoogleDocument56 pagesCronograma Da OBMEP - Documentos GoogleMarilia MottaPas encore d'évaluation
- Tutorial A Prova de Idiotas Pra Fazer Seu GH3Document3 pagesTutorial A Prova de Idiotas Pra Fazer Seu GH3Gray FullbusterPas encore d'évaluation
- Manual de Configuração REMUX IS720LADocument15 pagesManual de Configuração REMUX IS720LAEngenhariaPas encore d'évaluation
- Propagação via satélite em Banda KuDocument20 pagesPropagação via satélite em Banda KuIsrael FrankePas encore d'évaluation
- SKF SNL 3044 G + C 3044 SpecificationDocument5 pagesSKF SNL 3044 G + C 3044 SpecificationHenrique FrancoPas encore d'évaluation
- Transações BasisDocument24 pagesTransações Basis20jgas09Pas encore d'évaluation
- Switch 3comDocument13 pagesSwitch 3comThais RamosPas encore d'évaluation
- NBR Iso 12207 PDFDocument35 pagesNBR Iso 12207 PDFMauro Mendes100% (2)
- Web CamDocument9 pagesWeb CamMarcos Moura RamosPas encore d'évaluation
- Exercícios Resolvidos: Raiz ComplexaDocument4 pagesExercícios Resolvidos: Raiz ComplexaDiego OliveiraPas encore d'évaluation