Vous aimerez peut-être aussi
- Modelo Certificado de Medicion Pozo A TierraDocument3 pagesModelo Certificado de Medicion Pozo A TierraEfrain Chura82% (33)
- Electrotecnia. MáquinasDocument30 pagesElectrotecnia. MáquinasAUSAM123100% (1)
- Simbología de Transformadores EléctricosDocument3 pagesSimbología de Transformadores EléctricosMarie Vega50% (2)
- Sesion 7.1 Espira Giratoria 2017 IIDocument7 pagesSesion 7.1 Espira Giratoria 2017 IIJavierJimenezPas encore d'évaluation
- IntroducciónDocument5 pagesIntroduccióndiego prado100% (5)
- Transformadores ToroidalesDocument19 pagesTransformadores ToroidalesCarlos ToMenPas encore d'évaluation
- Calculo de TransformadorDocument7 pagesCalculo de TransformadormaesemarcoPas encore d'évaluation
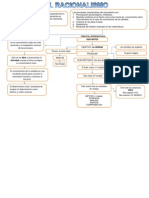
- Mapa Conceptual RacionalismoDocument7 pagesMapa Conceptual RacionalismoMimis Taz50% (4)
- Transformadores EléctricosDocument21 pagesTransformadores EléctricosMarco Vinicio De Leon EscobarPas encore d'évaluation
- 2.icsa Protección Transformadores Contra Se ReducidoDocument101 pages2.icsa Protección Transformadores Contra Se ReducidoFer LopezPas encore d'évaluation
- El Transformador Electrónica CompletaDocument10 pagesEl Transformador Electrónica Completa4685752Pas encore d'évaluation
- Pruebas Maquinas Electric As TiberioDocument127 pagesPruebas Maquinas Electric As TiberioLiliana LeiroPas encore d'évaluation
- Diseño de un transformador de 115V/250WDocument4 pagesDiseño de un transformador de 115V/250WJesús TorresPas encore d'évaluation
- Radioelectricidad Numero 5Document106 pagesRadioelectricidad Numero 5Paco Alemany100% (1)
- Carga ArtificialDocument6 pagesCarga ArtificialLuchiioPas encore d'évaluation
- Electronica Industrial 05Document79 pagesElectronica Industrial 05José Luis Montes de OcaPas encore d'évaluation
- Laboratorio 1 de Maquinas Eléctricas - UNLPDocument10 pagesLaboratorio 1 de Maquinas Eléctricas - UNLPPope_014Pas encore d'évaluation
- El Horno de MicroondasDocument128 pagesEl Horno de MicroondasJose JujuyPas encore d'évaluation
- Tarea 4 Modelado de Sistemas Electricos de PotenciaDocument4 pagesTarea 4 Modelado de Sistemas Electricos de PotenciaAldo David Silva MartinezPas encore d'évaluation
- Ensayo Técnico Sobre Antena Dipolo para FMDocument8 pagesEnsayo Técnico Sobre Antena Dipolo para FMOscar Ramos SotoPas encore d'évaluation
- Apuntes Tema 06 - Antenas Terrestres de TV e RadioDocument12 pagesApuntes Tema 06 - Antenas Terrestres de TV e RadioJorge González GarcíaPas encore d'évaluation
- Apuntes Transformadores Monofasicos UTN FRTDocument30 pagesApuntes Transformadores Monofasicos UTN FRTRuben Marcelo Prado100% (3)
- Antena Acortada 160 M PDFDocument1 pageAntena Acortada 160 M PDFAlejandro SundePas encore d'évaluation
- 9c. BobinasDocument29 pages9c. BobinasKarol Saenz SethPas encore d'évaluation
- Carta de Smith Problema 3Document1 pageCarta de Smith Problema 3José G. MalagueraPas encore d'évaluation
- Transformador idealDocument91 pagesTransformador idealEuclides León OchoaPas encore d'évaluation
- Manual SWR BridgeDocument5 pagesManual SWR BridgeTractorDiéselPas encore d'évaluation
- Bujes BYC - Catalogo ElectrodomesticoDocument8 pagesBujes BYC - Catalogo ElectrodomesticocristianalonsoPas encore d'évaluation
- Corriente flujo toroide aceroDocument5 pagesCorriente flujo toroide aceroAldo David Silva MartinezPas encore d'évaluation
- Grupo 5Document41 pagesGrupo 5Ana FigueroaPas encore d'évaluation
- Ure Mayo 2017Document84 pagesUre Mayo 2017enriqueunoPas encore d'évaluation
- La Carta de SmithDocument15 pagesLa Carta de SmithJuan Carlos Cuevas DomingoPas encore d'évaluation
- Guía para La Solución de Problemas en Hornos de MicroondasDocument50 pagesGuía para La Solución de Problemas en Hornos de MicroondasrrquinteroPas encore d'évaluation
- Tablas, Fórmulas y Gráficas para El Cálculo de Máquinas AsíncronasDocument12 pagesTablas, Fórmulas y Gráficas para El Cálculo de Máquinas AsíncronasGualaPas encore d'évaluation
- 6.protec LMT Aer y Subt ReducidoDocument66 pages6.protec LMT Aer y Subt ReducidoFer LopezPas encore d'évaluation
- Acoplador Antena Hilo ParaleloDocument2 pagesAcoplador Antena Hilo ParaleloLorenzo Delgado100% (1)
- Fuente de Poder de Una PCDocument31 pagesFuente de Poder de Una PCSoledad Paricollo GutierrezPas encore d'évaluation
- TRANFORMADORESDocument23 pagesTRANFORMADORESJonathan Lugo0% (1)
- 77 290 Ducatocamper 603.99.481 Es 01 06.14 L LGDocument367 pages77 290 Ducatocamper 603.99.481 Es 01 06.14 L LGpabloPas encore d'évaluation
- Gilberto Harper - OdtDocument2 pagesGilberto Harper - Odtjose2020Pas encore d'évaluation
- Etn-62!07!97 - Reactor NeutroDocument9 pagesEtn-62!07!97 - Reactor NeutroMaman86Pas encore d'évaluation
- Reguladores de Voltaje LinealesDocument67 pagesReguladores de Voltaje LinealesJosé Luis GuzmánPas encore d'évaluation
- Bobinado de TransformadoresDocument8 pagesBobinado de TransformadoresCCATUNCARPas encore d'évaluation
- Carta de SmithDocument32 pagesCarta de SmithFRANKLINCURAYHERNAPas encore d'évaluation
- Ensayo Del Vacio de Un Transformador MonofasicoDocument4 pagesEnsayo Del Vacio de Un Transformador MonofasicoDarwin MaguanaPas encore d'évaluation
- Devanados MaqDocument8 pagesDevanados Maqapi-3807426100% (1)
- 0501 Ringo UHF 5DB Ilovepdf CompressedDocument1 page0501 Ringo UHF 5DB Ilovepdf CompressedDaniel HasinkPas encore d'évaluation
- RFSim99 y CoaxthapDocument13 pagesRFSim99 y CoaxthapRebeca Salazar0% (1)
- El Horno de Microondas - Funcionamiento, Prueba y Reparación (Parte 2)Document50 pagesEl Horno de Microondas - Funcionamiento, Prueba y Reparación (Parte 2)MULTISETRONPas encore d'évaluation
- Carta de Smith-1Document15 pagesCarta de Smith-1chica2011Pas encore d'évaluation
- Laboratorio 2 Máquinas Eléctricas - UNLPDocument6 pagesLaboratorio 2 Máquinas Eléctricas - UNLPPope_014Pas encore d'évaluation
- Laboratorio 1 El Transformador MonofásicoDocument13 pagesLaboratorio 1 El Transformador MonofásicoEdwin Michael Jeri TorresPas encore d'évaluation
- Diseño de un transformador monofásicoDocument13 pagesDiseño de un transformador monofásicoGERARDO EMANUEL TRISTAN UTURUNCOPas encore d'évaluation
- Antenas y Líneas Transmision para RTVDocument34 pagesAntenas y Líneas Transmision para RTVJm JbPas encore d'évaluation
- Rectificadores de voltaje de CA: Media onda, onda completa y puenteDocument8 pagesRectificadores de voltaje de CA: Media onda, onda completa y puentemcluissPas encore d'évaluation
- TOROIDALDocument11 pagesTOROIDALbrayan casilla apulacaPas encore d'évaluation
- Partes de Un TransformadorDocument11 pagesPartes de Un TransformadorFelix ZantosPas encore d'évaluation
- Parametros transformador monofasicoDocument3 pagesParametros transformador monofasiconicolasre85Pas encore d'évaluation
- RectificadoresDocument25 pagesRectificadoresJosé Luis GuzmánPas encore d'évaluation
- Manual TransformadorDocument122 pagesManual TransformadorAlexandra Moreno FanelaPas encore d'évaluation
- Laboratorio 5 Maquinas Electricas IIDocument10 pagesLaboratorio 5 Maquinas Electricas IIAnthony ClevinPas encore d'évaluation
- Aplicaciones Sincronas-8Document9 pagesAplicaciones Sincronas-8VICTOR HUAMANPas encore d'évaluation
- Informe 6 MOTOR UNIVERSALDocument11 pagesInforme 6 MOTOR UNIVERSALdiego baron huelvasPas encore d'évaluation
- Informe Motor MonofasicooDocument9 pagesInforme Motor Monofasicooandres atencioPas encore d'évaluation
- PrincipiosDocument10 pagesPrincipiosFundación CiaraPas encore d'évaluation
- Lab 02 Medicion Puesta A TierraDocument4 pagesLab 02 Medicion Puesta A TierraJoel Ramiro Escalante OchoaPas encore d'évaluation
- Taller de Caracteristicas de Las LamparasDocument4 pagesTaller de Caracteristicas de Las LamparasJoel Ramiro Escalante OchoaPas encore d'évaluation
- Lab 04 Resistencia de AislamientoDocument3 pagesLab 04 Resistencia de AislamientoJoel Ramiro Escalante OchoaPas encore d'évaluation
- Lab 03 Luminotecnia y FotometriaDocument5 pagesLab 03 Luminotecnia y FotometriaJoel Ramiro Escalante OchoaPas encore d'évaluation
- Aplicación de Las Ecuaciones Diferenciales A La EconomiaDocument14 pagesAplicación de Las Ecuaciones Diferenciales A La EconomiaLarissa Pacheco Bado57% (7)
- Lab 01 Medicion Resistividad2docxDocument6 pagesLab 01 Medicion Resistividad2docxJoel Ramiro Escalante OchoaPas encore d'évaluation
- Preguntas - Frecuentes IV CicloDocument7 pagesPreguntas - Frecuentes IV CicloJoel Ramiro Escalante OchoaPas encore d'évaluation
- JUSJOGADocument2 pagesJUSJOGAJoel Ramiro Escalante OchoaPas encore d'évaluation
- Lab 03 Luminotecnia y FotometriaDocument5 pagesLab 03 Luminotecnia y FotometriaJoel Ramiro Escalante OchoaPas encore d'évaluation
- Ejercicios CircuitosDocument6 pagesEjercicios CircuitosJoel Ramiro Escalante OchoaPas encore d'évaluation
- COMUNICACIÓN EFICAZ - Alta TensiondocxDocument7 pagesCOMUNICACIÓN EFICAZ - Alta TensiondocxJoel Ramiro Escalante OchoaPas encore d'évaluation
- Ejercicio - Maquinas SincronasDocument6 pagesEjercicio - Maquinas SincronasJoel Ramiro Escalante OchoaPas encore d'évaluation
- Memoriria Descrptiva Tienda - DepartamentoDocument12 pagesMemoriria Descrptiva Tienda - DepartamentoJoel Ramiro Escalante OchoaPas encore d'évaluation
- 01520Document20 pages01520ruth feliPas encore d'évaluation
- 01 Maquinas Asincronas Jaula de Ardilla HMDocument10 pages01 Maquinas Asincronas Jaula de Ardilla HMmarcelobacatubacaPas encore d'évaluation
- Límites de Funciones TrigonométricasDocument21 pagesLímites de Funciones TrigonométricasFernando Contreras GodinezPas encore d'évaluation
- Lab 09.docx Maquinas 1Document10 pagesLab 09.docx Maquinas 1Joel Ramiro Escalante OchoaPas encore d'évaluation
- Ejercicios CircuitosDocument6 pagesEjercicios CircuitosJoel Ramiro Escalante OchoaPas encore d'évaluation
- Conclusion EsDocument1 pageConclusion EsJoel Ramiro Escalante OchoaPas encore d'évaluation
- Acti 2Document2 pagesActi 2Joel Ramiro Escalante OchoaPas encore d'évaluation
- Maq. Elect. II Lab 9 Pruebas de VacioDocument23 pagesMaq. Elect. II Lab 9 Pruebas de VacioJoel Ramiro Escalante OchoaPas encore d'évaluation
- Laboratorio 02: Flujo de Potencia Y Pérdidas en Generadores de Corriente Continua Con Excitación en ShuntDocument8 pagesLaboratorio 02: Flujo de Potencia Y Pérdidas en Generadores de Corriente Continua Con Excitación en ShuntJoel Ramiro Escalante OchoaPas encore d'évaluation
- Instructivo de Medición de Caudal Anexo Inf - Corregido Gul IanaDocument4 pagesInstructivo de Medición de Caudal Anexo Inf - Corregido Gul IanaJoel Ramiro Escalante OchoaPas encore d'évaluation
- Instructivo de Medición de Caudal Anexo Inf - Corregido Gul IanaDocument4 pagesInstructivo de Medición de Caudal Anexo Inf - Corregido Gul IanaJoel Ramiro Escalante OchoaPas encore d'évaluation
- Lab 09.docx Maquinas 1Document10 pagesLab 09.docx Maquinas 1Joel Ramiro Escalante OchoaPas encore d'évaluation
- Lab 02.docx Maquinas 1Document6 pagesLab 02.docx Maquinas 1Joel Ramiro Escalante OchoaPas encore d'évaluation
- Amplificador de Simetria ComplementariaDocument4 pagesAmplificador de Simetria ComplementariaJoel Ramiro Escalante OchoaPas encore d'évaluation
- Mantenimiento de motores eléctricos: Diagnóstico y puesta en operación de un motor de corriente continuaDocument30 pagesMantenimiento de motores eléctricos: Diagnóstico y puesta en operación de un motor de corriente continuaRubi CoparaPas encore d'évaluation
- Preparatorio 4Document6 pagesPreparatorio 4IsmaelPas encore d'évaluation
- Ingeniería de detalle ampliación transformación CDC y CDODocument16 pagesIngeniería de detalle ampliación transformación CDC y CDOhseq sarturPas encore d'évaluation
- Dialjial - 3 - Trasformadores - AvanzadoDocument2 pagesDialjial - 3 - Trasformadores - AvanzadoPerdro JJPas encore d'évaluation
- TAREA 3 - Instalaciones EléctricasDocument43 pagesTAREA 3 - Instalaciones EléctricasKef StarPas encore d'évaluation
- Eaf 017-2021Document97 pagesEaf 017-2021DiegoPas encore d'évaluation
- Sillabus Mantto Reles Rev2Document3 pagesSillabus Mantto Reles Rev2Oscar GarciaPas encore d'évaluation
- Vibraciones Magnetomecánicas de Transformador Trifásico de Tres PatasDocument5 pagesVibraciones Magnetomecánicas de Transformador Trifásico de Tres PatasGiovanny PovedaPas encore d'évaluation
- Ejemplo FusiblesDocument4 pagesEjemplo FusiblesRenzoZaldivarCastañedaPas encore d'évaluation
- Carrera de Ingeniería Electrónica y Control Carrera de Ingeniería EléctricaDocument3 pagesCarrera de Ingeniería Electrónica y Control Carrera de Ingeniería EléctricaJesica QuingaPas encore d'évaluation
- Inductores Paralelos y MixtosDocument8 pagesInductores Paralelos y MixtosItzayana Reyes Martin0% (1)
- Generadores Con y Sin EscobillasDocument2 pagesGeneradores Con y Sin EscobillasEfrain Martínez MontielPas encore d'évaluation
- Circuitos Acoplados MagneticamenteDocument13 pagesCircuitos Acoplados MagneticamenteRubinno TtitoPas encore d'évaluation
- Clase 09 - ML 244 - 22 de Abril de 2021-OkDocument44 pagesClase 09 - ML 244 - 22 de Abril de 2021-OkTomas gomezPas encore d'évaluation
- Reporte 6 - Lab Maquinas ElectricasDocument14 pagesReporte 6 - Lab Maquinas ElectricasCarlos MirandaPas encore d'évaluation
- Cee-4 JoDocument77 pagesCee-4 JoDiego ValdiviezoPas encore d'évaluation
- Partes principales motor trifásico ACDocument33 pagesPartes principales motor trifásico ACRoberto CanquePas encore d'évaluation
- Alion 2013 Pag 1 - 5Document5 pagesAlion 2013 Pag 1 - 5djquanthyumPas encore d'évaluation
- Circuitos IntegradosDocument1 pageCircuitos IntegradosMILLA MILLAPas encore d'évaluation
- Máquinas EléctricasDocument20 pagesMáquinas Eléctricasjoseonofre26Pas encore d'évaluation
- M015B01 01Document114 pagesM015B01 01VíctorPas encore d'évaluation
- Problemas de Maquinas Electricas UNIDocument3 pagesProblemas de Maquinas Electricas UNICarlos Rudas RamirezPas encore d'évaluation
- Máquinas DC 2014 - 02Document82 pagesMáquinas DC 2014 - 02Nitabo EstradaPas encore d'évaluation
- Motor de inducción trifásicoDocument12 pagesMotor de inducción trifásicoikkii hiyori100% (1)
- Proyecto en Limpio-1Document47 pagesProyecto en Limpio-1Ronald Conde JaldinPas encore d'évaluation
- Informe de Un Motor EléctricoDocument14 pagesInforme de Un Motor EléctricoDeyvid Apaza QuispePas encore d'évaluation