Vous aimerez peut-être aussi
- A-Z Survival Items Post SHTFDocument28 pagesA-Z Survival Items Post SHTFekott100% (1)
- Glory in The Cross - Holy Thursday - Schutte PDFDocument1 pageGlory in The Cross - Holy Thursday - Schutte PDFsharon0murphyPas encore d'évaluation
- Ryff's Six-Factor Model of Psychological Well-BeingDocument7 pagesRyff's Six-Factor Model of Psychological Well-BeingYogi Sastrawan100% (1)
- MJDF Mcqs - Mixed - PDFDocument19 pagesMJDF Mcqs - Mixed - PDFAyesha Awan0% (3)
- ICON Finals Casebook 2021-22Document149 pagesICON Finals Casebook 2021-22Ishan ShuklaPas encore d'évaluation
- Trading Rules To Successful ProfitsDocument89 pagesTrading Rules To Successful ProfitsOuattaraPas encore d'évaluation
- Al-Farabi Fusul Al MadaniDocument107 pagesAl-Farabi Fusul Al MadaniDaniel G.G.100% (1)
- How Should We Allocate Scarce Resources Over Our Business Portfolio?Document20 pagesHow Should We Allocate Scarce Resources Over Our Business Portfolio?Vivek AryaPas encore d'évaluation
- First Field Assessment of Bacillus Thuringiensis Subsp. Kurstaki Aerial Application On The Colony Performance of Apis Mellifera L. (Hymenoptera: Apidae)Document4 pagesFirst Field Assessment of Bacillus Thuringiensis Subsp. Kurstaki Aerial Application On The Colony Performance of Apis Mellifera L. (Hymenoptera: Apidae)Alexandra CoponyPas encore d'évaluation
- Tell Aec He 2008Document12 pagesTell Aec He 2008Lok DhaPas encore d'évaluation
- Peña Et Al. - 2018 - Estimating Tree Height and Biomass of A Poplar Plantation With Image-Based UAV TechnologyDocument14 pagesPeña Et Al. - 2018 - Estimating Tree Height and Biomass of A Poplar Plantation With Image-Based UAV TechnologyPablo Giliard ZanellaPas encore d'évaluation
- Machine Vision - Idenfication of PlantsDocument21 pagesMachine Vision - Idenfication of PlantsrphmiPas encore d'évaluation
- Classification of Cynodon Spp. Grass Cultivars by UAVDocument5 pagesClassification of Cynodon Spp. Grass Cultivars by UAVIJAERS JOURNALPas encore d'évaluation
- FieldPlant A Dataset of Field Plant Images For PlaDocument12 pagesFieldPlant A Dataset of Field Plant Images For PlaTendai MatomaPas encore d'évaluation
- 02 Perambatan Kalor 2010Document8 pages02 Perambatan Kalor 2010Erpi SiregarPas encore d'évaluation
- 1 s2.0 S0168169921000715 MainDocument13 pages1 s2.0 S0168169921000715 Maingopal91carpenter_515Pas encore d'évaluation
- Weed Detection in Agricultural Fields Using Deep Learning ProcessDocument7 pagesWeed Detection in Agricultural Fields Using Deep Learning ProcessIJRASETPublicationsPas encore d'évaluation
- Weed Detection in Agricultural FieldsDocument7 pagesWeed Detection in Agricultural FieldsIJRASETPublicationsPas encore d'évaluation
- Defoliacion - Vision ArtificialDocument9 pagesDefoliacion - Vision ArtificialllarcherPas encore d'évaluation
- MoC1 3Document7 pagesMoC1 3Arthur AguilarPas encore d'évaluation
- Advances in Image Processing For Detection of Plant Disease PDFDocument7 pagesAdvances in Image Processing For Detection of Plant Disease PDFnishu goelPas encore d'évaluation
- Impact of Ultraviolet C Radiation and Ozone Application On The Physiological Quality of Organic Maize SeedsDocument6 pagesImpact of Ultraviolet C Radiation and Ozone Application On The Physiological Quality of Organic Maize SeedsIJAERS JOURNALPas encore d'évaluation
- Jaemyung Shin Et Al - 2021 - A Deep Learning Approach For RGB Image-Based Powdery Mildew Disease DetectionDocument8 pagesJaemyung Shin Et Al - 2021 - A Deep Learning Approach For RGB Image-Based Powdery Mildew Disease Detectionbigliang98Pas encore d'évaluation
- Hair Fescue and Sheep Sorrel Identification Using Deep Learning in Wild Blueberry ProductionRemote SensingDocument18 pagesHair Fescue and Sheep Sorrel Identification Using Deep Learning in Wild Blueberry ProductionRemote Sensinggeiner reap castañedaPas encore d'évaluation
- Detection and Classification of Plant Leaf Diseases by Using Deep Learning Algorithm IJERTCONV6IS07082Document5 pagesDetection and Classification of Plant Leaf Diseases by Using Deep Learning Algorithm IJERTCONV6IS07082saikumarPas encore d'évaluation
- 9535-9541 (7175)Document9 pages9535-9541 (7175)Mehr RaoPas encore d'évaluation
- Detection of White Root Rot in Avocado Trees by Remote SensingDocument7 pagesDetection of White Root Rot in Avocado Trees by Remote SensingJulian OtalvaroPas encore d'évaluation
- Applications of Video Image Analysis in AgricultureDocument13 pagesApplications of Video Image Analysis in AgricultureMohana KurubaPas encore d'évaluation
- Effect of Shading and Insect Proof Nets On Screenhouse Light EnvironmentDocument8 pagesEffect of Shading and Insect Proof Nets On Screenhouse Light EnvironmentMoh EfendiPas encore d'évaluation
- A Tomato Leaf Diseases Classification Method Based On Deep LearningDocument5 pagesA Tomato Leaf Diseases Classification Method Based On Deep LearningRiya RanaPas encore d'évaluation
- UntitledDocument10 pagesUntitledYassine HamdanePas encore d'évaluation
- Agriculture Plant Disease Investigation and Image Classification With Artificial Neural Network Using MLDocument4 pagesAgriculture Plant Disease Investigation and Image Classification With Artificial Neural Network Using MLVVCET - CSE DEPARTMENTPas encore d'évaluation
- Weed DetectionDocument6 pagesWeed DetectionIJRASETPublicationsPas encore d'évaluation
- Preprints202307 0800 v1Document19 pagesPreprints202307 0800 v1tuanminh140309Pas encore d'évaluation
- Real-Time Human Tracking Using Multi-Features Visual With CNN-LSTM and Q-LearningDocument15 pagesReal-Time Human Tracking Using Multi-Features Visual With CNN-LSTM and Q-LearningEDARA KEERTHI LAHARIPas encore d'évaluation
- Ext 86507Document7 pagesExt 86507joel mshanaPas encore d'évaluation
- Application of Image Processing in Agriculture: A Survey: International Journal of Computer Applications August 2012Document8 pagesApplication of Image Processing in Agriculture: A Survey: International Journal of Computer Applications August 2012AbhishekPas encore d'évaluation
- Performance Analysis of Transfer Learning Model and Prediction of Corn Leaf DiseasesDocument12 pagesPerformance Analysis of Transfer Learning Model and Prediction of Corn Leaf DiseasesIJRASETPublicationsPas encore d'évaluation
- 14) A - Novel - Approach - For - Invasive - Weeds - and - Vegetation - Surveys - Using - UAS - and - Artificial - Intelligence-1Document6 pages14) A - Novel - Approach - For - Invasive - Weeds - and - Vegetation - Surveys - Using - UAS - and - Artificial - Intelligence-1Céline BirolleauPas encore d'évaluation
- 1 s2.0 S2214785320385382 MainDocument10 pages1 s2.0 S2214785320385382 Mainrose risePas encore d'évaluation
- Sustainability 14 01458Document14 pagesSustainability 14 01458sekharraoPas encore d'évaluation
- 7aca PDFDocument7 pages7aca PDFMurali KrishnaPas encore d'évaluation
- Olive TreesDocument4 pagesOlive TreesIrèn RéniPas encore d'évaluation
- 9 VII July 2021Document10 pages9 VII July 2021Bharath ChicchiPas encore d'évaluation
- Pub Version Ieeesmc2019Document7 pagesPub Version Ieeesmc2019Bruno SantosPas encore d'évaluation
- Field Pest Monitoring & Pest SurveillanceDocument17 pagesField Pest Monitoring & Pest SurveillanceradhePas encore d'évaluation
- Plant Disease Detection and Solution SystemDocument6 pagesPlant Disease Detection and Solution SystemIJRASETPublicationsPas encore d'évaluation
- Syaufina 2018 IOP Conf. Ser. Earth Environ. Sci. 203 012015Document9 pagesSyaufina 2018 IOP Conf. Ser. Earth Environ. Sci. 203 012015suci hajati husmaPas encore d'évaluation
- Deep Learning Model Based Early Plant Disease DetectionDocument7 pagesDeep Learning Model Based Early Plant Disease DetectionSAMREEN FIZAPas encore d'évaluation
- Fpls 13 1053329Document14 pagesFpls 13 1053329MADHAV PARIHARPas encore d'évaluation
- FL.12 PX Prabaningrum 2021Document13 pagesFL.12 PX Prabaningrum 2021Zirtup NafiiPas encore d'évaluation
- (IJCST-V11I3P2) :K.Vivek, P.Kashi Naga Jyothi, G.Venkatakiran, SK - ShaheedDocument4 pages(IJCST-V11I3P2) :K.Vivek, P.Kashi Naga Jyothi, G.Venkatakiran, SK - ShaheedEighthSenseGroupPas encore d'évaluation
- Computers and Electronics in Agriculture: Amreen Abbas, Sweta Jain, Mahesh Gour, Swetha VankudothuDocument9 pagesComputers and Electronics in Agriculture: Amreen Abbas, Sweta Jain, Mahesh Gour, Swetha Vankudothukevin gelaudePas encore d'évaluation
- Assessing Mango Anthracnose Using A New Three-DimeDocument9 pagesAssessing Mango Anthracnose Using A New Three-DimeKelly kim UyangurinPas encore d'évaluation
- 68-46-N734-Mihai Gabriel MATACHEDocument10 pages68-46-N734-Mihai Gabriel MATACHEMihai MatachePas encore d'évaluation
- 1 s2.0 S0924271622000739 MainDocument20 pages1 s2.0 S0924271622000739 MainMala NingsihPas encore d'évaluation
- 2.A Deep Learning Approach Incorporating YOLO v5 and Atten - 2022 - Computers andDocument11 pages2.A Deep Learning Approach Incorporating YOLO v5 and Atten - 2022 - Computers andBeatrice Geanina RusPas encore d'évaluation
- 109Document6 pages109Lukman Hakim Dwi SugitoPas encore d'évaluation
- Random ForestrDocument3 pagesRandom Forestrhashamallahdin1510Pas encore d'évaluation
- IJCRT2205118Document8 pagesIJCRT2205118joel mshanaPas encore d'évaluation
- 2013 IJCIGR Scopus 1682-1130 RGIF 0.42 DetectionofunhealthyregionofplantleavesandclassificationofplantleafdiseasesusingtexturefeaturesDocument8 pages2013 IJCIGR Scopus 1682-1130 RGIF 0.42 DetectionofunhealthyregionofplantleavesandclassificationofplantleafdiseasesusingtexturefeaturesCHANDANA M SPas encore d'évaluation
- Remotesensing 15 01633 v2Document26 pagesRemotesensing 15 01633 v2Alexandre AlbuquerquePas encore d'évaluation
- Automated Identification of Northern Leaf Blight-Infected Maize Plantsfrom Field Imagery Using Deep LearningDocument7 pagesAutomated Identification of Northern Leaf Blight-Infected Maize Plantsfrom Field Imagery Using Deep Learningzoric99Pas encore d'évaluation
- Análise de Nematóides em Lavouras de Café em Diferentes Altitudes Usando Imagens AéreasDocument5 pagesAnálise de Nematóides em Lavouras de Café em Diferentes Altitudes Usando Imagens AéreasMylena DornelesPas encore d'évaluation
- Literature SurveyDocument6 pagesLiterature SurveyNerella NikithaPas encore d'évaluation
- Plant Disease Detection Using Image ProcessingDocument5 pagesPlant Disease Detection Using Image ProcessingTest Email100% (1)
- Animals 12 01976 v2Document16 pagesAnimals 12 01976 v2JPPas encore d'évaluation
- Crop Height Estimation Based On UAV Images - Methods, Errors, and StrategiesDocument13 pagesCrop Height Estimation Based On UAV Images - Methods, Errors, and StrategiesRodrigo NogueiraPas encore d'évaluation
- Understanding Vine Hyperspectral Signature ThroughDocument32 pagesUnderstanding Vine Hyperspectral Signature ThroughRodrigo NogueiraPas encore d'évaluation
- Descrição Da Camera Do CelularDocument11 pagesDescrição Da Camera Do CelularRodrigo NogueiraPas encore d'évaluation
- Historical Evolution and Recent Advances in Precision FarmingDocument36 pagesHistorical Evolution and Recent Advances in Precision FarmingRodrigo NogueiraPas encore d'évaluation
- 2017 QueirozDocument10 pages2017 QueirozRodrigo NogueiraPas encore d'évaluation
- Agricultura de Precisão e Sistemas Sensores - O Estado Da ArteDocument72 pagesAgricultura de Precisão e Sistemas Sensores - O Estado Da ArteRodrigo NogueiraPas encore d'évaluation
- Sensoriamento Remoto para A Deteccao de Pragas em Cultivos ComerciaisDocument22 pagesSensoriamento Remoto para A Deteccao de Pragas em Cultivos ComerciaisRodrigo NogueiraPas encore d'évaluation
- Essay Fertilizers - Organic Vs ChemicalDocument3 pagesEssay Fertilizers - Organic Vs ChemicalRodrigo NogueiraPas encore d'évaluation
- Automating Map Creation A4Document31 pagesAutomating Map Creation A4Rodrigo Nogueira0% (1)
- AJ IntroductionDocument31 pagesAJ IntroductiontrollergamehuydkPas encore d'évaluation
- Ingres in ReproductionDocument20 pagesIngres in ReproductionKarlPas encore d'évaluation
- NHD Process PaperDocument2 pagesNHD Process Paperapi-122116050Pas encore d'évaluation
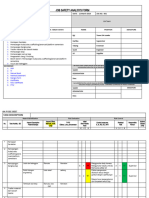
- JSA FormDocument4 pagesJSA Formfinjho839Pas encore d'évaluation
- IPMI Intelligent Chassis Management Bus Bridge Specification v1.0Document83 pagesIPMI Intelligent Chassis Management Bus Bridge Specification v1.0alexchuahPas encore d'évaluation
- Excel Lesson 5 QuizDocument5 pagesExcel Lesson 5 Quizdeep72Pas encore d'évaluation
- New Regular and Irregular Verb List and Adjectives 1-Ix-2021Document11 pagesNew Regular and Irregular Verb List and Adjectives 1-Ix-2021MEDALITH ANEL HUACRE SICHAPas encore d'évaluation
- 20150714rev1 ASPACC 2015Document22 pages20150714rev1 ASPACC 2015HERDI SUTANTOPas encore d'évaluation
- Catalog de Aparatura Si Instrumentar Veterinar Eikemeyer-GermaniaDocument336 pagesCatalog de Aparatura Si Instrumentar Veterinar Eikemeyer-GermaniaDr. Dragos CobzariuPas encore d'évaluation
- EffectivenessDocument13 pagesEffectivenessPhillip MendozaPas encore d'évaluation
- Brianna Pratt - l3stl1 - Dsu Lesson Plan TemplateDocument5 pagesBrianna Pratt - l3stl1 - Dsu Lesson Plan Templateapi-593886164Pas encore d'évaluation
- LNWH Alcohol GUIDELINE SUMMARY 2018Document1 pageLNWH Alcohol GUIDELINE SUMMARY 2018Ai Hwa LimPas encore d'évaluation
- Qualification of Class Y Flip Chip Cga Package Technology For SpaceDocument8 pagesQualification of Class Y Flip Chip Cga Package Technology For SpacePepe ChorizoPas encore d'évaluation
- Promotion of Coconut in The Production of YoghurtDocument4 pagesPromotion of Coconut in The Production of YoghurtԱբրենիկա ՖերլինPas encore d'évaluation
- High Intermediate 2 Workbook AnswerDocument23 pagesHigh Intermediate 2 Workbook AnswernikwPas encore d'évaluation
- EIL 6-51-0051-Rev 06 - 1.1kv-Xlpe - Dimension Cat - B Armour-BbpDocument2 pagesEIL 6-51-0051-Rev 06 - 1.1kv-Xlpe - Dimension Cat - B Armour-BbpShubham BaderiyaPas encore d'évaluation
- Curriculum Policy in IndonesiaDocument23 pagesCurriculum Policy in IndonesiaEma MardiahPas encore d'évaluation
- Narrative FixDocument6 pagesNarrative Fixfitry100% (1)
- Learning Spanish - 1dDocument23 pagesLearning Spanish - 1dChima C. Ugwuegbu100% (1)
- Standalone Financial Results, Limited Review Report For December 31, 2016 (Result)Document4 pagesStandalone Financial Results, Limited Review Report For December 31, 2016 (Result)Shyam SunderPas encore d'évaluation
- SeaTrust HullScan UserGuide Consolidated Rev01Document203 pagesSeaTrust HullScan UserGuide Consolidated Rev01bong2rmPas encore d'évaluation
- Annotated Bibliography 2Document3 pagesAnnotated Bibliography 2api-458997989Pas encore d'évaluation