Vous aimerez peut-être aussi
- PPQ CFSTDocument50 pagesPPQ CFSTRoberto Santos FilhoPas encore d'évaluation
- Jorge Linhares - Preparado para Ser GrandeDocument21 pagesJorge Linhares - Preparado para Ser Grandejean100% (1)
- CFP c208 - Texto Base Parte4Document134 pagesCFP c208 - Texto Base Parte4Elysson RamalhoPas encore d'évaluation
- ES826 - Engenharia Simultânea - ApresentaçãoDocument10 pagesES826 - Engenharia Simultânea - Apresentaçãolnery_1Pas encore d'évaluation
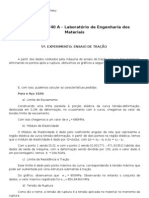
- Lab Materiais - Relatório Exp 4Document2 pagesLab Materiais - Relatório Exp 4lnery_1Pas encore d'évaluation
- Lab Materiais - Relatório Exp 1Document4 pagesLab Materiais - Relatório Exp 1lnery_1Pas encore d'évaluation
- Lab Materiais - Relatório Exp 3Document2 pagesLab Materiais - Relatório Exp 3lnery_1Pas encore d'évaluation
- Lab Materiais - Relatório Exp 2Document2 pagesLab Materiais - Relatório Exp 2lnery_1Pas encore d'évaluation
- Lab Materiais - Relatório Exp 5Document3 pagesLab Materiais - Relatório Exp 5lnery_1Pas encore d'évaluation
- ES826 - Engenharia Simultânea - TrabalhoDocument8 pagesES826 - Engenharia Simultânea - Trabalholnery_1Pas encore d'évaluation
- Apostila Controle - 25 - Realimentação de EstadoDocument29 pagesApostila Controle - 25 - Realimentação de Estadolnery_1Pas encore d'évaluation
- Apostila Controle - 22 - Projeto Avanço / Atraso AnalíticoDocument33 pagesApostila Controle - 22 - Projeto Avanço / Atraso Analíticolnery_1Pas encore d'évaluation
- Apostila Controle - 20 - Projeto PID AnalíticoDocument37 pagesApostila Controle - 20 - Projeto PID Analíticolnery_1Pas encore d'évaluation
- Apostila Controle - 24 - Modelos CanônicosDocument33 pagesApostila Controle - 24 - Modelos Canônicoslnery_1Pas encore d'évaluation
- Apostila Controle - 21 - Avanço e AtrasoDocument32 pagesApostila Controle - 21 - Avanço e Atrasolnery_1Pas encore d'évaluation
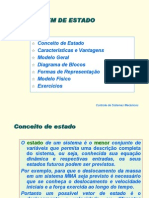
- Apostila Controle - 23 - Modelagem de EstadoDocument23 pagesApostila Controle - 23 - Modelagem de Estadolnery_1Pas encore d'évaluation
- Apostila Controle - 19a - Visualização Da Estabilidade RelativaDocument27 pagesApostila Controle - 19a - Visualização Da Estabilidade Relativalnery_1Pas encore d'évaluation
- Apostila Controle - 15 - Desempenho de Sistemas (Domínio Da Frequência) - Nyquist e NicholsDocument29 pagesApostila Controle - 15 - Desempenho de Sistemas (Domínio Da Frequência) - Nyquist e Nicholslnery_1Pas encore d'évaluation
- Apostila Controle - 19b - Projeto PID Por Zigler NicholsDocument21 pagesApostila Controle - 19b - Projeto PID Por Zigler Nicholslnery_1Pas encore d'évaluation
- Apostila Controle - 17 - Análise de Estabilidade (Critério de Nyquist)Document21 pagesApostila Controle - 17 - Análise de Estabilidade (Critério de Nyquist)lnery_1Pas encore d'évaluation
- Apostila Controle - 16 - Análise de EstabilidadeDocument31 pagesApostila Controle - 16 - Análise de Estabilidadelnery_1Pas encore d'évaluation
- Apostila Controle - 12 - Modelagem de DistúrbioDocument32 pagesApostila Controle - 12 - Modelagem de Distúrbiolnery_1Pas encore d'évaluation
- Apostila Controle - 18 - Estabilidade Relativa (MG, MF)Document26 pagesApostila Controle - 18 - Estabilidade Relativa (MG, MF)lnery_1Pas encore d'évaluation
- Apostila Controle - 15c - Rlocus (Lugar Das Raízes)Document11 pagesApostila Controle - 15c - Rlocus (Lugar Das Raízes)lnery_1Pas encore d'évaluation
- Apostila Controle - 14 - Desempenho de Sistemas (Domínio Da Frequência) - BodeDocument36 pagesApostila Controle - 14 - Desempenho de Sistemas (Domínio Da Frequência) - Bodelnery_1Pas encore d'évaluation
- Apostila Controle - 15b - Projeto Usando Rlocus (Lugar Das Raízes)Document9 pagesApostila Controle - 15b - Projeto Usando Rlocus (Lugar Das Raízes)lnery_1Pas encore d'évaluation
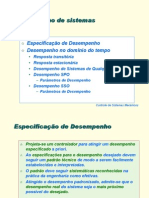
- Apostila Controle - 13 - Desempenho de Sistemas (Domínio Do Tempo)Document27 pagesApostila Controle - 13 - Desempenho de Sistemas (Domínio Do Tempo)lnery_1Pas encore d'évaluation
- Apostila Controle - 09 - Erro EstacionárioDocument33 pagesApostila Controle - 09 - Erro Estacionáriolnery_1Pas encore d'évaluation
- Apostila Controle - 07 - Integral de Convolução, Função de Transferência e Função Resposta em FrequênciaDocument35 pagesApostila Controle - 07 - Integral de Convolução, Função de Transferência e Função Resposta em Frequêncialnery_1Pas encore d'évaluation
- Apostila Controle - 10 - Motor Corrente ContínuaDocument15 pagesApostila Controle - 10 - Motor Corrente Contínualnery_1Pas encore d'évaluation
- Apostila Controle - 11 - Efeito Dos ControladoresDocument37 pagesApostila Controle - 11 - Efeito Dos Controladoreslnery_1Pas encore d'évaluation
- Apostila Controle - 08 - Sensores e AtuadoresDocument32 pagesApostila Controle - 08 - Sensores e Atuadoreslnery_1Pas encore d'évaluation
- Apostila Controle - 06 - Solução de Equações DiferenciaisDocument32 pagesApostila Controle - 06 - Solução de Equações Diferenciaislnery_1Pas encore d'évaluation
- Treinamentos AbecgDocument48 pagesTreinamentos AbecgPatricia MendonçaPas encore d'évaluation
- UFCD A362 - Construções Metalicas - Dar TEKLADocument1 pageUFCD A362 - Construções Metalicas - Dar TEKLAAntonio MarinhoPas encore d'évaluation
- Patrimônios Despercebidos No Centro Leste de Florianópolis:: Identificação Como Memória VisívelDocument74 pagesPatrimônios Despercebidos No Centro Leste de Florianópolis:: Identificação Como Memória VisívelAndressa SPas encore d'évaluation
- AO02 - Adm Serviços - Aparecida Alves Dos SantosDocument3 pagesAO02 - Adm Serviços - Aparecida Alves Dos SantosAparecida Alves Dos SantosPas encore d'évaluation
- Lei Complementar #97, de 3 de Setembro de 2.010Document32 pagesLei Complementar #97, de 3 de Setembro de 2.010Gabo747Pas encore d'évaluation
- Livro Desenho e AnimaçãoDocument236 pagesLivro Desenho e AnimaçãoGilmar SilvaPas encore d'évaluation
- Tradusaun Expropriasaun Biling Lei N 8 2017Document36 pagesTradusaun Expropriasaun Biling Lei N 8 2017zequiel fernandesPas encore d'évaluation
- Relé de Tempo E Estrela Triângulo: Esquema Elétrico LK-RT Lk-RyDocument4 pagesRelé de Tempo E Estrela Triângulo: Esquema Elétrico LK-RT Lk-RyPaulo FerreiraPas encore d'évaluation
- Nara SuicidaDocument4 pagesNara SuicidaPatrickRigotiPas encore d'évaluation
- 29 Eletrodinamica GeradoresDocument12 pages29 Eletrodinamica Geradoresapi-3713096100% (3)
- Sermões Vol. 5.2Document106 pagesSermões Vol. 5.2api-19731043Pas encore d'évaluation
- Transtorno Delirante - Distúrbios de Saúde Mental - Manual MSD Versão Saúde para A FamíliaDocument3 pagesTranstorno Delirante - Distúrbios de Saúde Mental - Manual MSD Versão Saúde para A FamíliaNunoPas encore d'évaluation
- Curriculum AdrianoDocument3 pagesCurriculum AdrianoMarcio Adriano Nepomuceno SilvaPas encore d'évaluation
- Univeridade Lusófona de Cabo Verde Licenciatura em Direito Disciplina: História Do Direito Direito - 2° Semestre Professora: Msc. Jocilene GomesDocument8 pagesUniveridade Lusófona de Cabo Verde Licenciatura em Direito Disciplina: História Do Direito Direito - 2° Semestre Professora: Msc. Jocilene GomesCésar Santos SilvaPas encore d'évaluation
- Projeto Bombeiro Civil MirimDocument15 pagesProjeto Bombeiro Civil MirimEufrásio Pereira100% (2)
- Masculinidade em Crise-WPS OfficeDocument3 pagesMasculinidade em Crise-WPS OfficePastorNocivaldo CostaPas encore d'évaluation
- FRM Eng 032 01 Manual Valvula Globo 3 Vias s980Document7 pagesFRM Eng 032 01 Manual Valvula Globo 3 Vias s980ENGEVI PROJETOSPas encore d'évaluation
- Gilberto Freyre - Prefácio de Casa Grande SenzalaDocument18 pagesGilberto Freyre - Prefácio de Casa Grande SenzalaIago LinsPas encore d'évaluation
- Comentários Sobre SquinnerDocument7 pagesComentários Sobre SquinnerANSELMOPas encore d'évaluation
- BIA Método BrasilianoDocument10 pagesBIA Método BrasilianomarcelorgsPas encore d'évaluation
- Administração Empreendedora 2010 Word-97-2003Document10 pagesAdministração Empreendedora 2010 Word-97-2003Francis SeixasPas encore d'évaluation
- Estudo DirigidoDocument3 pagesEstudo DirigidoJudilson LimaPas encore d'évaluation
- Trabalho Termodinamica PDFDocument5 pagesTrabalho Termodinamica PDFliviaaugustoPas encore d'évaluation
- Instalações Elétricas Industriais: AulaDocument16 pagesInstalações Elétricas Industriais: AulaBenites PatrickPas encore d'évaluation
- Simualdo Aprova Brasil Portugues 3 AnoDocument58 pagesSimualdo Aprova Brasil Portugues 3 AnoMauriane AlmeidaPas encore d'évaluation
- 7º Ano 04 A 08 Maio. PmuDocument15 pages7º Ano 04 A 08 Maio. PmuAndréa MartinsPas encore d'évaluation
- Apresentacao Jose Neves Michelin PDFDocument9 pagesApresentacao Jose Neves Michelin PDFMauricio Costa De MouraPas encore d'évaluation