Vous aimerez peut-être aussi
- Homework 6 - SolutionsDocument9 pagesHomework 6 - SolutionsAztvPas encore d'évaluation
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesD'EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesÉvaluation : 1.5 sur 5 étoiles1.5/5 (2)
- Commissioning Generator AVR, PSS and Model Validation: Wenyan Gu, Member, IEEEDocument5 pagesCommissioning Generator AVR, PSS and Model Validation: Wenyan Gu, Member, IEEEAlexander Osorio100% (1)
- Designing Compensator ProblemsDocument7 pagesDesigning Compensator ProblemsJustin Jose PPas encore d'évaluation
- HW9 SolutionsDocument5 pagesHW9 SolutionsAndreas mPas encore d'évaluation
- Trial ProblemsDocument7 pagesTrial ProblemsAdu GilbertPas encore d'évaluation
- EE342 Spring 2007 Midterm ExamDocument4 pagesEE342 Spring 2007 Midterm Examtt esPas encore d'évaluation
- Solution Set 8Document7 pagesSolution Set 8Abdul AlsomaliPas encore d'évaluation
- Week 4 SolutionDocument6 pagesWeek 4 SolutionRaja KumarPas encore d'évaluation
- CS Full TestDocument18 pagesCS Full TestAnbu selviPas encore d'évaluation
- Solutions To Practice For Final Exam Math 3400 - Intro To Differential EquationsDocument8 pagesSolutions To Practice For Final Exam Math 3400 - Intro To Differential EquationsRenjelle Mae AutrizPas encore d'évaluation
- Homework 1Document2 pagesHomework 1Vu LePas encore d'évaluation
- Suggested Solution To Past Papers PDFDocument20 pagesSuggested Solution To Past Papers PDFMgla AngelPas encore d'évaluation
- 990uf Eeec-ControlDocument25 pages990uf Eeec-ControlMarshaPas encore d'évaluation
- Control EnggDocument5 pagesControl EnggRaja KumarPas encore d'évaluation
- EEET2197 Tute8 SolnDocument14 pagesEEET2197 Tute8 SolnCollin lcwPas encore d'évaluation
- Week 8 Assignment and SolutionsDocument7 pagesWeek 8 Assignment and SolutionsG. Dancer GhPas encore d'évaluation
- Solution To HW3Document9 pagesSolution To HW3AthonioMourinhoPas encore d'évaluation
- Additional ExercisesDocument11 pagesAdditional ExercisesGianluca CastrinesiPas encore d'évaluation
- Solutions To Practice For Final Exam Math 3400 - Intro To Differential EquationsDocument8 pagesSolutions To Practice For Final Exam Math 3400 - Intro To Differential EquationsMuhammad Shoaib RabbaniPas encore d'évaluation
- Chapter 5 HW Solution: Review QuestionsDocument6 pagesChapter 5 HW Solution: Review QuestionslgPas encore d'évaluation
- State EstimatorDocument32 pagesState EstimatordannyabevoyagerPas encore d'évaluation
- 4AMmB M12 Matrics and Determinants III WorksheetDocument5 pages4AMmB M12 Matrics and Determinants III WorksheetPremesh the greatPas encore d'évaluation
- AE11 SolDocument62 pagesAE11 SolManmohan SinghPas encore d'évaluation
- EE 371 Control Systems Exam II, Spring 1997 Solution: Ee Dept. Univ. of Nevada, RenoDocument3 pagesEE 371 Control Systems Exam II, Spring 1997 Solution: Ee Dept. Univ. of Nevada, RenoAmal AhmedPas encore d'évaluation
- 2018 SolutionDocument9 pages2018 SolutionMohammad Almoghabat AlmPas encore d'évaluation
- Homework 2 SolDocument3 pagesHomework 2 SolMatondo ReubenPas encore d'évaluation
- Solution Assignment 7Document5 pagesSolution Assignment 7sushant sharmaPas encore d'évaluation
- Solution To HW9Document11 pagesSolution To HW9Andreina BallunoPas encore d'évaluation
- Sample Problems of Control System 2018Document18 pagesSample Problems of Control System 2018anon_463330020Pas encore d'évaluation
- Lecture22 CCFDocument26 pagesLecture22 CCFTime PassPas encore d'évaluation
- Homework 7 - SolutionsDocument13 pagesHomework 7 - SolutionsMuhamad ArifPas encore d'évaluation
- Chap10 - 2 - Stability of Closed-Loop Control SystemsDocument27 pagesChap10 - 2 - Stability of Closed-Loop Control SystemsSaidPas encore d'évaluation
- Solutions: Signals & SystemsDocument21 pagesSolutions: Signals & Systemskamalya ismayilovaPas encore d'évaluation
- Class Xii Maths Pre Board 2023-24 (Navodaya Vidhyalaya Samiti) SolutionsDocument15 pagesClass Xii Maths Pre Board 2023-24 (Navodaya Vidhyalaya Samiti) Solutionsrsarthak227Pas encore d'évaluation
- Me - 2007 1 PDFDocument53 pagesMe - 2007 1 PDFhetPas encore d'évaluation
- EE250 PS04 SolutionDocument13 pagesEE250 PS04 SolutionUJJAWAL GAMERPas encore d'évaluation
- AST Exam Sample Solution WiSe 2020 21Document25 pagesAST Exam Sample Solution WiSe 2020 21Rehman SaleemPas encore d'évaluation
- Statefb AbiramDocument29 pagesStatefb Abiramumairnaeem_90Pas encore d'évaluation
- MATHEMATICS Previous GateDocument25 pagesMATHEMATICS Previous GateSAGI RATHNA PRASAD me14d210Pas encore d'évaluation
- EE 4CL4 - Control System Design Homework Assignment #9: K U K U K y K y K yDocument1 pageEE 4CL4 - Control System Design Homework Assignment #9: K U K U K y K y K yArmando MalonePas encore d'évaluation
- Control Systems: Module No.: 1Document7 pagesControl Systems: Module No.: 1Benj MendozaPas encore d'évaluation
- Control Systems-1 PDFDocument8 pagesControl Systems-1 PDFmaheshbabu527Pas encore d'évaluation
- HwsDocument9 pagesHwshudha69Pas encore d'évaluation
- K. Write Expression For The Motor Torque On The Load.: V S) V S)Document3 pagesK. Write Expression For The Motor Torque On The Load.: V S) V S)Ganesha KumarPas encore d'évaluation
- EE301-Control Systems: Assignment-Compensators 27 July 2020Document2 pagesEE301-Control Systems: Assignment-Compensators 27 July 2020Rohit BhamuPas encore d'évaluation
- E209A: Analysis and Control of Nonlinear Systems Problem Set 3 SolutionsDocument13 pagesE209A: Analysis and Control of Nonlinear Systems Problem Set 3 SolutionstetrixPas encore d'évaluation
- State Space Analysis: Common Data For Questions 3 & 4Document6 pagesState Space Analysis: Common Data For Questions 3 & 4Amey TaruPas encore d'évaluation
- HW 5 SolDocument10 pagesHW 5 SolPedroPas encore d'évaluation
- Sol 221 First Summer2016Document4 pagesSol 221 First Summer2016Delos Santos, Jayson C.Pas encore d'évaluation
- Assignment NewDocument10 pagesAssignment NewChitra M. chitra.ecePas encore d'évaluation
- Determinants+ (Properties+,+Mulitplication+of+Determinants+) JEE+2021Document44 pagesDeterminants+ (Properties+,+Mulitplication+of+Determinants+) JEE+2021BrucleePas encore d'évaluation
- Algebra Advanced (Coret)Document23 pagesAlgebra Advanced (Coret)Reinaldo SalimPas encore d'évaluation
- Discrete Fourier Transform Questions and Answers - SanfoundryDocument12 pagesDiscrete Fourier Transform Questions and Answers - SanfoundrykshambelmekuyePas encore d'évaluation
- Mid Sem SolDocument6 pagesMid Sem SolNeils BohrPas encore d'évaluation
- CBSE Sample Papers For Class 12 Maths Set 11 With Solutions - Merit BatchDocument1 pageCBSE Sample Papers For Class 12 Maths Set 11 With Solutions - Merit Batchxpert shikshaPas encore d'évaluation
- Ss 2 TFDocument12 pagesSs 2 TFkhin muyar ayePas encore d'évaluation
- Assignment 5 (Sol.) : Introduction To Machine Learning Prof. B. RavindranDocument5 pagesAssignment 5 (Sol.) : Introduction To Machine Learning Prof. B. Ravindrannoor aliPas encore d'évaluation
- Project 1Document9 pagesProject 1likpataPas encore d'évaluation
- ME 411 Fall 2012 Lab 7Document5 pagesME 411 Fall 2012 Lab 7Peter FinzellPas encore d'évaluation
- Section 3 Stability PDFDocument44 pagesSection 3 Stability PDFyaswanth179Pas encore d'évaluation
- Control Engg Module Wise Question and Model Question PaperDocument82 pagesControl Engg Module Wise Question and Model Question PaperRoshan BahadurPas encore d'évaluation
- ELE 4623: Control Systems: Faculty of Engineering TechnologyDocument14 pagesELE 4623: Control Systems: Faculty of Engineering TechnologyMaitha SaeedPas encore d'évaluation
- Laboratory Exercise #8Document26 pagesLaboratory Exercise #8Yasmin KayePas encore d'évaluation
- Documentation For The Bytronic Pendulum Control System: (Version 2.1)Document37 pagesDocumentation For The Bytronic Pendulum Control System: (Version 2.1)Pedro Eusebio AlvaradoPas encore d'évaluation
- Pre GATE 2018 2nd Test Question PaperDocument20 pagesPre GATE 2018 2nd Test Question PaperPANKAJ AGRAHARIPas encore d'évaluation
- Control Systems: Lect.7 Steady State ErrorDocument44 pagesControl Systems: Lect.7 Steady State Errorkhaled jPas encore d'évaluation
- Lab 1 To Study The Lead Compensator DesignDocument6 pagesLab 1 To Study The Lead Compensator DesignMuhammad AsaadPas encore d'évaluation
- Ansi/I - 75.25.01-2000: Test Procedure For Control Valve Response Measurement From Step InputsDocument32 pagesAnsi/I - 75.25.01-2000: Test Procedure For Control Valve Response Measurement From Step InputsAbdeldjalil AchourPas encore d'évaluation
- Design Via Root Locus NewDocument39 pagesDesign Via Root Locus NewLaluPas encore d'évaluation
- 2020 11 Chapter 9 - Controller Design Via Root Locus TechniquesDocument69 pages2020 11 Chapter 9 - Controller Design Via Root Locus TechniquesMartin LuhutPas encore d'évaluation
- Robust GsDocument264 pagesRobust GsLucas S. CarmoPas encore d'évaluation
- Industrial2 - PIDDocument66 pagesIndustrial2 - PIDCiubotaru Diana ClaudiaPas encore d'évaluation
- Icest 2011 977 930Document8 pagesIcest 2011 977 93001666754614Pas encore d'évaluation
- ELEC 264 - Assignment 1Document13 pagesELEC 264 - Assignment 1Guria HameedPas encore d'évaluation
- Question Paper For Introduction To Flight Vehicle ControlDocument2 pagesQuestion Paper For Introduction To Flight Vehicle ControlAnimesh PhatowaliPas encore d'évaluation
- Dynamic Modeling of Thyristor Controlled Series Capacitor in PSCAD and RTDS EnvironmentsDocument6 pagesDynamic Modeling of Thyristor Controlled Series Capacitor in PSCAD and RTDS EnvironmentsthavaselvanPas encore d'évaluation
- Ece131l Exp7Document4 pagesEce131l Exp7Carmela SapalaranPas encore d'évaluation
- Controller Design For Processes With Difficult DynamicsDocument24 pagesController Design For Processes With Difficult DynamicsMuhammed AfnazPas encore d'évaluation
- 1997 pachterQFTDocument18 pages1997 pachterQFTCumhur ÖzbaşPas encore d'évaluation
- L-Lab Manual Abp 1 To 5Document84 pagesL-Lab Manual Abp 1 To 5Yogesh KarlekarPas encore d'évaluation
- ME132S15 Class Notes PDFDocument227 pagesME132S15 Class Notes PDFAndy MeyersPas encore d'évaluation
- Time Response AnalysisDocument37 pagesTime Response Analysis7014KANISHKA JAISWALPas encore d'évaluation
- Lecture Note 02 PDFDocument104 pagesLecture Note 02 PDFHilario TomePas encore d'évaluation
- 03 BD Reduction + Time ResponseDocument30 pages03 BD Reduction + Time Responseomar hanyPas encore d'évaluation
- Fuzzy-Pid Based Performance Analysis of DC MotorDocument8 pagesFuzzy-Pid Based Performance Analysis of DC MotorAnonymous AFFiZnPas encore d'évaluation
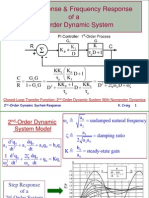
- Second-Order Dynamic Systems KCC 2011Document39 pagesSecond-Order Dynamic Systems KCC 2011Naguib NurPas encore d'évaluation