Vous aimerez peut-être aussi
- LsApi PDFDocument347 pagesLsApi PDFEduardo Martin Vega100% (2)
- Practice QuestionsDocument3 pagesPractice QuestionsBlair ZhangPas encore d'évaluation
- Tutorial 6Document3 pagesTutorial 6Gaurav APas encore d'évaluation
- Assignment 2 PDICDocument2 pagesAssignment 2 PDICAaditya GargPas encore d'évaluation
- Control SystemDocument31 pagesControl SystemDeepak ThapaPas encore d'évaluation
- UEE1724Document3 pagesUEE1724zentillPas encore d'évaluation
- Question Paper Code:: Reg. No.Document3 pagesQuestion Paper Code:: Reg. No.HOD ECE KNCETPas encore d'évaluation
- Tutorial 8Document2 pagesTutorial 8Gaurav APas encore d'évaluation
- Advanced Control Theory (Eee)Document3 pagesAdvanced Control Theory (Eee)Adarsh VkPas encore d'évaluation
- 06 ESm 43 MQDocument6 pages06 ESm 43 MQGuruprasadPas encore d'évaluation
- Control System - 1 PYQsDocument7 pagesControl System - 1 PYQsAbhishekPas encore d'évaluation
- MEC E 420 Feedback Control Dynamic SystemsDocument8 pagesMEC E 420 Feedback Control Dynamic SystemscatzzrulePas encore d'évaluation
- Rr411005 Digital Control SystemsDocument8 pagesRr411005 Digital Control SystemsSrinivasa Rao GPas encore d'évaluation
- Rajneesh Yadav - Untitleddesign - Original PDFDocument4 pagesRajneesh Yadav - Untitleddesign - Original PDFsantvan jagtapPas encore d'évaluation
- AssignmentDocument2 pagesAssignmentRehman AbbasPas encore d'évaluation
- Supaul College of Engineering, Supaul: 031812 (Linear Control Theory) MID Semester ExaminationDocument3 pagesSupaul College of Engineering, Supaul: 031812 (Linear Control Theory) MID Semester ExaminationMichaelPas encore d'évaluation
- EE 312 Lecture 5Document7 pagesEE 312 Lecture 5دكتور كونوهاPas encore d'évaluation
- K. Write Expression For The Motor Torque On The Load.: V S) V S)Document3 pagesK. Write Expression For The Motor Torque On The Load.: V S) V S)Ganesha KumarPas encore d'évaluation
- EE301 PracticeQuestions2 2022Document6 pagesEE301 PracticeQuestions2 2022SonuPas encore d'évaluation
- Model Answers CONTROL SYSTEM EC-502 Midterm-I July-Dec 2015-16Document17 pagesModel Answers CONTROL SYSTEM EC-502 Midterm-I July-Dec 2015-16VIPUL100% (1)
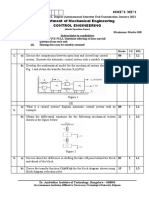
- USN 1 D A 18ME71/ ME71 Control EngineeringDocument3 pagesUSN 1 D A 18ME71/ ME71 Control EngineeringPramod RajPas encore d'évaluation
- Question Paper Code: 18641: Reg. NoDocument4 pagesQuestion Paper Code: 18641: Reg. NoNaveen Raj EPas encore d'évaluation
- EEE3005 Exam PaperDocument6 pagesEEE3005 Exam PaperEthan OwPas encore d'évaluation
- Assignment NewDocument10 pagesAssignment NewChitra M. chitra.ecePas encore d'évaluation
- Be Winter 2022Document2 pagesBe Winter 2022avinashlimje0Pas encore d'évaluation
- 5935r09-Digital Control SystemsDocument2 pages5935r09-Digital Control SystemsSaikumar NemalikantiPas encore d'évaluation
- EE 312 Lecture 1Document12 pagesEE 312 Lecture 1دكتور كونوهاPas encore d'évaluation
- BMS College of Engineering, Bangalore-560019: May 2016 Semester End Main ExaminationsDocument3 pagesBMS College of Engineering, Bangalore-560019: May 2016 Semester End Main Examinationskoushik bhatPas encore d'évaluation
- Data Structures & Algorithms PART-A Answer ALL Questions (10x2 20 Marks)Document2 pagesData Structures & Algorithms PART-A Answer ALL Questions (10x2 20 Marks)mvdurgadeviPas encore d'évaluation
- Data Structures & Algorithms QuestionsDocument2 pagesData Structures & Algorithms QuestionsmvdurgadeviPas encore d'évaluation
- Question Paper Code:: Reg. No.Document3 pagesQuestion Paper Code:: Reg. No.rfdggfyhrtyb gfhjh tjPas encore d'évaluation
- SimbuDocument3 pagesSimbu84- R. SilamabarasanPas encore d'évaluation
- ELEN90055 Control Systems: Midsemester TestDocument2 pagesELEN90055 Control Systems: Midsemester TestMingyue WangPas encore d'évaluation
- 2 Year System Dynamics Sheet 6Document4 pages2 Year System Dynamics Sheet 6Yasser BahaaPas encore d'évaluation
- Addis Ababa Science and Technology Department of Electrical and Computer Engineering Introduction To Control System Assignment ThreeDocument1 pageAddis Ababa Science and Technology Department of Electrical and Computer Engineering Introduction To Control System Assignment ThreehilmegnawPas encore d'évaluation
- Homework #3 For Everyone (5pts Each) :: Universidad Popular Del CesarDocument2 pagesHomework #3 For Everyone (5pts Each) :: Universidad Popular Del Cesarstalin roblesPas encore d'évaluation
- Chapter 7 - Solved Problems: Solutions To Solved Problem 7.1Document11 pagesChapter 7 - Solved Problems: Solutions To Solved Problem 7.1civaasPas encore d'évaluation
- ChE381 Process Dynamics & Control ExamDocument4 pagesChE381 Process Dynamics & Control ExamSushmitaPas encore d'évaluation
- 2022-Dec EC-411 100Document1 page2022-Dec EC-411 100Durgesh AnandPas encore d'évaluation
- 22-23Document2 pages22-23Goura Sundar TripathyPas encore d'évaluation
- Question Paper Code:: (10×2 20 Marks)Document4 pagesQuestion Paper Code:: (10×2 20 Marks)MohamedPas encore d'évaluation
- RMIT University: EEET2109 Mid Semester Test Answers (40 CharactersDocument4 pagesRMIT University: EEET2109 Mid Semester Test Answers (40 CharactersCollin lcwPas encore d'évaluation
- 2018 enDocument9 pages2018 enMohammad Almoghabat AlmPas encore d'évaluation
- Ys Us S S: BG3102 Control in Biosystems AssignmentDocument2 pagesYs Us S S: BG3102 Control in Biosystems AssignmenteliasPas encore d'évaluation
- COE-09-6th SemDocument12 pagesCOE-09-6th SemShobhit SaxenaPas encore d'évaluation
- HW9 SolutionsDocument5 pagesHW9 SolutionsAndreas mPas encore d'évaluation
- Sample Solution To Exam in MAS501 Control Systems 2 Autumn 2015Document8 pagesSample Solution To Exam in MAS501 Control Systems 2 Autumn 2015Priyesh PandeyPas encore d'évaluation
- CH 4Document26 pagesCH 4Keneni AlemayehuPas encore d'évaluation
- Control Systems and Mechatronics ExamDocument4 pagesControl Systems and Mechatronics ExamOdoch HerbertPas encore d'évaluation
- Midsem 21-22Document4 pagesMidsem 21-22nan.sayan30Pas encore d'évaluation
- II B.Tech II Semester, Regular Examinations, April/May - 2012 Control SystemsDocument8 pagesII B.Tech II Semester, Regular Examinations, April/May - 2012 Control SystemsViswa ChaitanyaPas encore d'évaluation
- Ahmedabad Institute of Technology: 3. Figures To The Right Indicate Full MarksDocument3 pagesAhmedabad Institute of Technology: 3. Figures To The Right Indicate Full MarksRutvi Vishal VaghelaPas encore d'évaluation
- 2021 Exam Ufmfw7153 Online Exams - 1705334350872Document11 pages2021 Exam Ufmfw7153 Online Exams - 1705334350872family7482pleasePas encore d'évaluation
- Control Systems Exam QuestionsDocument3 pagesControl Systems Exam QuestionsVinayPas encore d'évaluation
- Ee304 ADocument3 pagesEe304 AAboo FarisPas encore d'évaluation
- Problem Sheet 5Document1 pageProblem Sheet 5PSG SAIPas encore d'évaluation
- Control Systems-1 PDFDocument8 pagesControl Systems-1 PDFmaheshbabu527Pas encore d'évaluation
- The University of New South Wales School of Electrical Engineering and TelecommunicationsDocument10 pagesThe University of New South Wales School of Electrical Engineering and TelecommunicationskikikikemPas encore d'évaluation
- EE4CL4 2003 Homework10 QsDocument1 pageEE4CL4 2003 Homework10 QsArmando MalonePas encore d'évaluation
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99D'EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Pas encore d'évaluation
- 4368 Intro 2020Document58 pages4368 Intro 2020Armando MalonePas encore d'évaluation
- HW 03 SolDocument6 pagesHW 03 SolArmando MalonePas encore d'évaluation
- SP Robotics Course OutlineDocument23 pagesSP Robotics Course OutlineOdi AlowiwiPas encore d'évaluation
- 2005 - Advanced Robotic Manipulation - OussamaKhatibDocument136 pages2005 - Advanced Robotic Manipulation - OussamaKhatibnachoflores214793Pas encore d'évaluation
- RequirementsDocument1 pageRequirementsArmando MalonePas encore d'évaluation
- Exam in Automatic Control II Reglerteknik II 5hp: Good Luck!Document10 pagesExam in Automatic Control II Reglerteknik II 5hp: Good Luck!Armando MalonePas encore d'évaluation
- 2005 - Advanced Robotic Manipulation - OussamaKhatibDocument136 pages2005 - Advanced Robotic Manipulation - OussamaKhatibnachoflores214793Pas encore d'évaluation
- Appendices PDFDocument5 pagesAppendices PDFArmando MalonePas encore d'évaluation
- Requirements DevDocument1 pageRequirements DevArmando MalonePas encore d'évaluation
- PythonDocument151 pagesPythonAnonymous HHtUbpZfjgPas encore d'évaluation
- ReadmeDocument1 pageReadmeArmando MalonePas encore d'évaluation
- ReadmeDocument7 pagesReadmeArmando MalonePas encore d'évaluation
- Statics Notes: 185188137.doc Page 1 of 7Document7 pagesStatics Notes: 185188137.doc Page 1 of 7Robert WalusimbiPas encore d'évaluation
- READMEDocument1 pageREADMEArmando MalonePas encore d'évaluation
- Understanding Numerical Linear AlgebraDocument2 pagesUnderstanding Numerical Linear AlgebraArmando MalonePas encore d'évaluation
- 1 Semester - A.Y. 2015/2016: The University of Jordan School of Engineering Department of Mechatronics EngineeringDocument2 pages1 Semester - A.Y. 2015/2016: The University of Jordan School of Engineering Department of Mechatronics EngineeringArmando MalonePas encore d'évaluation
- Jha ProDocument1 pageJha ProArmando MalonePas encore d'évaluation
- Digital Control Syllabus 2013 - 2 PDFDocument2 pagesDigital Control Syllabus 2013 - 2 PDFArmando MalonePas encore d'évaluation
- En Cours 2017 Lfsab1104Document3 pagesEn Cours 2017 Lfsab1104Armando MalonePas encore d'évaluation
- IEEE Artcile Presentation StructureDocument1 pageIEEE Artcile Presentation StructureArmando MalonePas encore d'évaluation
- 09 Chapter 4Document29 pages09 Chapter 4Armando MalonePas encore d'évaluation
- 2Document78 pages2Armando MalonePas encore d'évaluation
- Aalborg Universitet: Levron, Yoash Guerrero, Josep M. Beck, YuvalDocument10 pagesAalborg Universitet: Levron, Yoash Guerrero, Josep M. Beck, YuvalArmando MalonePas encore d'évaluation
- Digital Control Syllabus 2013 - 2Document2 pagesDigital Control Syllabus 2013 - 2Armando MalonePas encore d'évaluation
- Review: Today's TopicDocument29 pagesReview: Today's TopicArmando MalonePas encore d'évaluation
- Steady-State Model and Power Flow Analysis of Grid-Connected Photovoltaic Power SystemDocument6 pagesSteady-State Model and Power Flow Analysis of Grid-Connected Photovoltaic Power SystemArmando MalonePas encore d'évaluation
- Academic Writing FSE 2018-19Document2 pagesAcademic Writing FSE 2018-19Armando MalonePas encore d'évaluation
- PR Ufung Regelungstechnik I (Control Systems I) : To Be Returned at The End of The Exam!Document13 pagesPR Ufung Regelungstechnik I (Control Systems I) : To Be Returned at The End of The Exam!Armando MalonePas encore d'évaluation
- SimulationofSmartGridPowerDispatch PDFDocument5 pagesSimulationofSmartGridPowerDispatch PDFArmando MalonePas encore d'évaluation
- 1681 7619 2 PB PDFDocument9 pages1681 7619 2 PB PDFArmando MalonePas encore d'évaluation
- Fault Report - Inventory Cpf1 Vs Caño LimomDocument37 pagesFault Report - Inventory Cpf1 Vs Caño LimomJessica RiveraPas encore d'évaluation
- PSD60-2R: Operation ManualDocument22 pagesPSD60-2R: Operation ManualOscar SantanaPas encore d'évaluation
- List of Practical Cs With SolutionDocument57 pagesList of Practical Cs With SolutionArjun KalaPas encore d'évaluation
- Chemistry Sectionwise Analysis of PYQs (2024) - Ec3e53a7 c902 4e85 A5dd 12c4bf1f4ae7 1Document5 pagesChemistry Sectionwise Analysis of PYQs (2024) - Ec3e53a7 c902 4e85 A5dd 12c4bf1f4ae7 1lakhbhat2020Pas encore d'évaluation
- Chapter 6 Basic Heat TransferDocument7 pagesChapter 6 Basic Heat TransferGabo MarquezPas encore d'évaluation
- EWDLEWML Servo Motor DriverDocument14 pagesEWDLEWML Servo Motor DriverWaleed LemsilkhiPas encore d'évaluation
- Full Paper Template IRC 2020Document3 pagesFull Paper Template IRC 2020Mobina AbdulRaufPas encore d'évaluation
- Welcome: Bahasa Inggris Teknik I Ahmad Nusi, S. PD., M. PDDocument11 pagesWelcome: Bahasa Inggris Teknik I Ahmad Nusi, S. PD., M. PDAsril SalongPas encore d'évaluation
- Design of Three Span Steel Composite FlyoverDocument85 pagesDesign of Three Span Steel Composite FlyoverStructural SpreadsheetsPas encore d'évaluation
- Ajmera - Treon - FF - R4 - 13-11-17 FinalDocument45 pagesAjmera - Treon - FF - R4 - 13-11-17 FinalNikita KadamPas encore d'évaluation
- IJETR032052Document6 pagesIJETR032052erpublicationPas encore d'évaluation
- CFA Level II 3 Topics - High Yield List of QuestionsDocument4 pagesCFA Level II 3 Topics - High Yield List of QuestionsCatalinPas encore d'évaluation
- Unified Modeling Language Class Diagram ..Uml)Document20 pagesUnified Modeling Language Class Diagram ..Uml)Yasmeen AltuwatiPas encore d'évaluation
- OptQuest User ManualDocument190 pagesOptQuest User ManualYamal E Askoul TPas encore d'évaluation
- Z 80 HelptopicsDocument5 pagesZ 80 HelptopicsEverly NPas encore d'évaluation
- Wound ScaleDocument4 pagesWound ScaleHumam SyriaPas encore d'évaluation
- Harduaganj Thermal Power Plant by Geetesh SharmaDocument66 pagesHarduaganj Thermal Power Plant by Geetesh Sharmageeteshaccurate100% (1)
- CFG Grammar: Context Free Grammar BasicsDocument34 pagesCFG Grammar: Context Free Grammar BasicsEd MolloPas encore d'évaluation
- State Standards: Common CoreDocument24 pagesState Standards: Common CoreEddy R. VélezPas encore d'évaluation
- AC axial compact fan technical specificationsDocument5 pagesAC axial compact fan technical specificationsdhanasekhar27Pas encore d'évaluation
- Active Heating and CoolingDocument16 pagesActive Heating and Coolinga_j_sanyal2590% (1)
- TVL CSS11 Q4 M1Document12 pagesTVL CSS11 Q4 M1Richard SugboPas encore d'évaluation
- Understanding Process ConditionsDocument41 pagesUnderstanding Process ConditionsIbrahim Al-HammadiPas encore d'évaluation
- Refinery TankagesDocument4 pagesRefinery Tankagesmayuresh1101100% (1)
- Treatment of Electroplating Wastewater Containing Cu2+, ZN 2+ and CR (VI) by ElectrocoagulationDocument8 pagesTreatment of Electroplating Wastewater Containing Cu2+, ZN 2+ and CR (VI) by ElectrocoagulationAnonymous ZAr1RKPas encore d'évaluation
- Evaluation of Lathyrus SativusDocument16 pagesEvaluation of Lathyrus SativusSAMI DHAOUIPas encore d'évaluation
- Gas-Insulated Switchgear: Type 8DN8 Up To 170 KV, 63 Ka, 4000 ADocument33 pagesGas-Insulated Switchgear: Type 8DN8 Up To 170 KV, 63 Ka, 4000 APélagie DAH SERETENONPas encore d'évaluation
- Powered Acoustimass - 30 Speaker System AM-30P: Service ManualDocument48 pagesPowered Acoustimass - 30 Speaker System AM-30P: Service ManualHama Aiea100% (1)
- Er DiagramsDocument20 pagesEr DiagramsMatthew BloomfieldPas encore d'évaluation