Vous aimerez peut-être aussi
- HPFi Hydraulic Support System 0700Document35 pagesHPFi Hydraulic Support System 0700g665013Pas encore d'évaluation
- Pump Repair and Restoration GuidelinesDocument3 pagesPump Repair and Restoration GuidelinescuprotecPas encore d'évaluation
- Alfa Laval Three Screw Pump - Alp Pump Range - Emd00457en PDFDocument6 pagesAlfa Laval Three Screw Pump - Alp Pump Range - Emd00457en PDFMuhd Khir Razani100% (1)
- Big 40 WGDocument80 pagesBig 40 WGsquibgo100% (1)
- Electric GeneratorDocument7 pagesElectric GeneratorRahul ShivuPas encore d'évaluation
- 23 09 13.33 - Control ValvesDocument25 pages23 09 13.33 - Control Valvesforevertay2000Pas encore d'évaluation
- Crosshead BRG Temp. Monitoring PDFDocument5 pagesCrosshead BRG Temp. Monitoring PDFPritish TandonPas encore d'évaluation
- Parker Autoclave Engineers: Fluid Componets Product Catalog Feb. 2016Document370 pagesParker Autoclave Engineers: Fluid Componets Product Catalog Feb. 2016mds9185Pas encore d'évaluation
- Turbine Gas Meter SM-RI-X Installation and Maintenance Manual 24 (1) .05.2002Document18 pagesTurbine Gas Meter SM-RI-X Installation and Maintenance Manual 24 (1) .05.2002Alan Mayuntupa InocentePas encore d'évaluation
- EL-O-MATIC Brch-EngDocument24 pagesEL-O-MATIC Brch-EngLadysAmaris100% (1)
- New Build - 270Ft LCT Listing IDDocument13 pagesNew Build - 270Ft LCT Listing IDrafetguzelsoy100% (1)
- Masterpact NT: User ManualDocument56 pagesMasterpact NT: User ManualkubikPas encore d'évaluation
- H-4 Controlair Valve: Description of ModelsDocument12 pagesH-4 Controlair Valve: Description of Modelslucas ronaldo coronel mendoza100% (1)
- Wartsila Wireless Temperature MonitoringDocument3 pagesWartsila Wireless Temperature MonitoringVito DigeoPas encore d'évaluation
- Dei ManualDocument131 pagesDei ManualJesus LunaPas encore d'évaluation
- DP-40 Aln Manual (MM10 R3)Document10 pagesDP-40 Aln Manual (MM10 R3)Amit ChourasiaPas encore d'évaluation
- FISHER Rotary Valve Selection GuideDocument16 pagesFISHER Rotary Valve Selection GuidemablangPas encore d'évaluation
- Azi FactDocument2 pagesAzi FactpropulziPas encore d'évaluation
- Sulzer-Rta76.part 1Document205 pagesSulzer-Rta76.part 1Long NguyễnPas encore d'évaluation
- Getting The Best Measurement From Your Turbine Meters: M.SC., P.EngDocument6 pagesGetting The Best Measurement From Your Turbine Meters: M.SC., P.Engwaheed100% (1)
- Multiphase PumpsDocument1 pageMultiphase PumpsMohammad Abdul RashidPas encore d'évaluation
- 665b Chockfast Orange Hardener Ratio Guide For Chocking Between Steel ConcrDocument2 pages665b Chockfast Orange Hardener Ratio Guide For Chocking Between Steel ConcrRizky RamadhanPas encore d'évaluation
- Product Doc 1 en 180Document6 pagesProduct Doc 1 en 180Fredy Mauricio Diaz VargasPas encore d'évaluation
- Chattering PSV: PSV Can Violently Chatter This Requires Design ConsiderationDocument1 pageChattering PSV: PSV Can Violently Chatter This Requires Design ConsiderationMreza JafariPas encore d'évaluation
- PIM130B1 - Daihatsu DT Series Archived JUN PDFDocument5 pagesPIM130B1 - Daihatsu DT Series Archived JUN PDFAnonymous XGsiY6rPas encore d'évaluation
- Cms Handler Document Handler 11Document12 pagesCms Handler Document Handler 11abuzer1981100% (1)
- 48 60Document5 pages48 60j1931ppPas encore d'évaluation
- 155.16-RP3 11-06 YiaDocument88 pages155.16-RP3 11-06 YiaLuis DerasPas encore d'évaluation
- Abbreviations HydraulicDocument1 pageAbbreviations HydraulicAbdul Junaedi0% (1)
- Industrial Application of Creep - Fatigue Crack Initiation and Growth Procedures For Remaining Life Analysis of Steam Turbine ComponentsDocument10 pagesIndustrial Application of Creep - Fatigue Crack Initiation and Growth Procedures For Remaining Life Analysis of Steam Turbine ComponentsFilipPas encore d'évaluation
- EGB-1P and EGB-2P Governor - ActuatorDocument68 pagesEGB-1P and EGB-2P Governor - ActuatorMiguel SoteloPas encore d'évaluation
- Operation & Maintenance ManualDocument82 pagesOperation & Maintenance ManualSuvek KumarPas encore d'évaluation
- Operation and maintenance instruction manual: 船用轻型冷水机组 Marine Light Water Chiller UnitDocument32 pagesOperation and maintenance instruction manual: 船用轻型冷水机组 Marine Light Water Chiller Unitnur hasanPas encore d'évaluation
- Rod Drop Monitroing TheoryDocument10 pagesRod Drop Monitroing TheoryAvik BhaiPas encore d'évaluation
- GP Rotork ActuatorsDocument8 pagesGP Rotork ActuatorsSuara84Pas encore d'évaluation
- Terasaki Tecs MCB Catalogue - v9 PDFDocument12 pagesTerasaki Tecs MCB Catalogue - v9 PDFshareyhouPas encore d'évaluation
- Weidmuller Analog Signal ConditionersDocument65 pagesWeidmuller Analog Signal ConditionersCem AlpaslanPas encore d'évaluation
- Gefico Brochure +UFDocument40 pagesGefico Brochure +UF1zorro10% (1)
- Instruction Manual For Gear Pump: Daito Kogyo Co., LTDDocument15 pagesInstruction Manual For Gear Pump: Daito Kogyo Co., LTDMoreno NuevoPas encore d'évaluation
- OPRA Turbines Brochure (English)Document8 pagesOPRA Turbines Brochure (English)HyungTae JangPas encore d'évaluation
- Vibration Integrity PrimerDocument2 pagesVibration Integrity PrimerJose BijoyPas encore d'évaluation
- Datasheet E Thermostatic Valve 0612 Rev8Document10 pagesDatasheet E Thermostatic Valve 0612 Rev8Mohamed AhteewishPas encore d'évaluation
- G 08Document7 pagesG 08zbkt07Pas encore d'évaluation
- Thermal Fluid HeatersDocument166 pagesThermal Fluid Heatersbornluky100% (1)
- E175e PDFDocument88 pagesE175e PDFgoomiPas encore d'évaluation
- TDI Catalog TurboStartTwo Brochure PDFDocument4 pagesTDI Catalog TurboStartTwo Brochure PDFEva Karia colorado MartinezPas encore d'évaluation
- Screw Pumps KRAL Double Station DKC DMC 01Document16 pagesScrew Pumps KRAL Double Station DKC DMC 01Eduardo MartinezPas encore d'évaluation
- ABB M2QA CatalogueDocument16 pagesABB M2QA CatalogueMaiPrachanartPas encore d'évaluation
- Positioner SIPART PS2 en-USDocument248 pagesPositioner SIPART PS2 en-USLucian IftemiePas encore d'évaluation
- Inverter/Charger User Manual: UP3000-HM5042 UP5000-HM8042Document72 pagesInverter/Charger User Manual: UP3000-HM5042 UP5000-HM8042Nyoman SuryasaPas encore d'évaluation
- Thyristor Control Heater Panel GuideDocument63 pagesThyristor Control Heater Panel Guidevaithy1990Pas encore d'évaluation
- Bombas AllweilerDocument14 pagesBombas AllweilerCARLOS ANDRES CARVAJAL SUAREZPas encore d'évaluation
- Adsorption ChillerDocument19 pagesAdsorption Chilleragalvan1311Pas encore d'évaluation
- Profile of the International Pump Industry: Market Prospects to 2010D'EverandProfile of the International Pump Industry: Market Prospects to 2010Évaluation : 1 sur 5 étoiles1/5 (1)
- New1Document14 pagesNew1Rasoul gholinia kiviPas encore d'évaluation
- UG Governor Installation Manual 54042DDocument12 pagesUG Governor Installation Manual 54042DKao SophearakPas encore d'évaluation
- Hose Reel Pump Assembly: Assembly, Disassembly and Repair GuideDocument18 pagesHose Reel Pump Assembly: Assembly, Disassembly and Repair GuideВиталий КозловскийPas encore d'évaluation
- CoverDocument3 pagesCoverBaxter LoachPas encore d'évaluation
- Eco Rich Ehu Series Instruction Manual Ehu25Document47 pagesEco Rich Ehu Series Instruction Manual Ehu25adeiv20027197Pas encore d'évaluation
- Manual Best Management PortsDocument156 pagesManual Best Management PortsAchraf DouiriPas encore d'évaluation
- SOP Templates 03Document1 pageSOP Templates 03MachineryengPas encore d'évaluation
- Seal Design GuideDocument119 pagesSeal Design GuideaytepePas encore d'évaluation
- Lip Seal Installation PDFDocument11 pagesLip Seal Installation PDFMachineryengPas encore d'évaluation
- ESA Best Available Techniques Issue 1Document4 pagesESA Best Available Techniques Issue 1vprochockyPas encore d'évaluation
- JC Gasket CranfoilDocument2 pagesJC Gasket CranfoilMachineryengPas encore d'évaluation
- SOP Number Insert Number: Standard Operating ProcedureDocument2 pagesSOP Number Insert Number: Standard Operating ProcedureLawPas encore d'évaluation
- Norsok ST 2001Document131 pagesNorsok ST 2001mamounsdPas encore d'évaluation
- HA Series Hydraulic Amplifier Electrical - Installation Operation Manual - Rev FDocument25 pagesHA Series Hydraulic Amplifier Electrical - Installation Operation Manual - Rev FMachineryeng0% (1)
- Hsg253 The Safe Isolation of Plant and EquipmentDocument81 pagesHsg253 The Safe Isolation of Plant and EquipmentRichard HollidayPas encore d'évaluation
- Steam TurbinesDocument8 pagesSteam Turbinesspalaniyandi100% (1)
- Api 617 CameronDocument31 pagesApi 617 CameronMachineryengPas encore d'évaluation
- Seal Design For High Pressure Offshore-Morton & EvansDocument10 pagesSeal Design For High Pressure Offshore-Morton & EvansMachineryengPas encore d'évaluation
- Compressor Performance Test Procedure Shaybah Rev.2 BorsigDocument23 pagesCompressor Performance Test Procedure Shaybah Rev.2 BorsigMachineryengPas encore d'évaluation
- Compressor Turbo-Air API a4-IRDocument12 pagesCompressor Turbo-Air API a4-IRMachineryengPas encore d'évaluation
- Borsig BZM - 2016 - EngDocument84 pagesBorsig BZM - 2016 - EngMachineryengPas encore d'évaluation
- Compressor MountingDocument41 pagesCompressor MountingjmacarroPas encore d'évaluation
- BZM Centrifugal CompressorDocument16 pagesBZM Centrifugal CompressorMachineryengPas encore d'évaluation
- Creating A World That Doesnt BreakdownDocument23 pagesCreating A World That Doesnt BreakdownmersiumPas encore d'évaluation
- BORSIG Valve PresentationDocument18 pagesBORSIG Valve PresentationMachineryengPas encore d'évaluation
- Pit Ot Tube Pump TechnologyDocument12 pagesPit Ot Tube Pump TechnologymariasofiarossiPas encore d'évaluation
- UtilityDocument8 pagesUtilityAmit JainPas encore d'évaluation
- Lifts and Hoists Maintenance Tasks PDFDocument19 pagesLifts and Hoists Maintenance Tasks PDFMachineryengPas encore d'évaluation
- Perf Improv To Aches Rev 0Document16 pagesPerf Improv To Aches Rev 0Poncho RmzPas encore d'évaluation
- Burgmann Quick Guide To Identifying Mechanical Seal FailuresDocument1 pageBurgmann Quick Guide To Identifying Mechanical Seal FailuresakabbaraPas encore d'évaluation
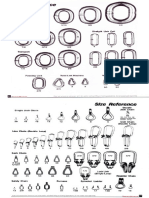
- Lifiting Chain Size Referance PDFDocument1 pageLifiting Chain Size Referance PDFMachineryengPas encore d'évaluation
- SVS.435 Steam Turbine Control UpgradesDocument4 pagesSVS.435 Steam Turbine Control UpgradesMachineryengPas encore d'évaluation
- Selection of Material Nace - H2S - Technical Paper PDFDocument21 pagesSelection of Material Nace - H2S - Technical Paper PDFajaysharma_1009Pas encore d'évaluation
- A-W and A-F Oil SeparatorsDocument1 pageA-W and A-F Oil SeparatorstribleprincePas encore d'évaluation
- AbstractDocument1 pageAbstractJignesh PrajapatiPas encore d'évaluation
- Innoversant Solutions - Business Consulting Services IndiaDocument15 pagesInnoversant Solutions - Business Consulting Services Indiaispl123Pas encore d'évaluation
- Voltage Drop CalculatorDocument6 pagesVoltage Drop CalculatorMariano SanchezPas encore d'évaluation
- Pakistan Wapda - Power Wing: Standard Operating ProceduresDocument8 pagesPakistan Wapda - Power Wing: Standard Operating Procedureszahra batoolPas encore d'évaluation
- ROV Inspection and Intervention VesselDocument2 pagesROV Inspection and Intervention VesselAhmad Reza AtefPas encore d'évaluation
- Best Actor and Actress Adjudication Rubric 41950cb9a3Document3 pagesBest Actor and Actress Adjudication Rubric 41950cb9a3Sarah Jhoy SalongaPas encore d'évaluation
- Multimedia Critique Paper 1Document4 pagesMultimedia Critique Paper 1api-345838334Pas encore d'évaluation
- Title of The Training Program Regional Training of Grades 4-8 Reading Teachers On Care For Non-Readers (CNR) Program Module No., Day & Session NoDocument18 pagesTitle of The Training Program Regional Training of Grades 4-8 Reading Teachers On Care For Non-Readers (CNR) Program Module No., Day & Session Nomarvin susminaPas encore d'évaluation
- Elephant Catalog V13 PDFDocument96 pagesElephant Catalog V13 PDFsamuelPas encore d'évaluation
- FINAL THESIS DOC LastDocument114 pagesFINAL THESIS DOC LastMulat ShierawPas encore d'évaluation
- Hotel Organizational StructureDocument3 pagesHotel Organizational StructureChi LinhPas encore d'évaluation
- Fret Position CalculatorDocument1 pageFret Position CalculatorRay RamirezPas encore d'évaluation
- Eng1-LAS MELC-3 FINALDocument10 pagesEng1-LAS MELC-3 FINALFarrah Joy AguilarPas encore d'évaluation
- Soft Sculpture EventsDocument28 pagesSoft Sculpture EventsAlabala BalaaPas encore d'évaluation
- Senarai Harta Modal Makmal KomputerDocument20 pagesSenarai Harta Modal Makmal Komputerapi-19878848100% (1)
- L 1 Introduction To MorphologyDocument31 pagesL 1 Introduction To MorphologyIftkhar GorsiPas encore d'évaluation
- 14.ergonomic Workstation Design For Science Laboratory (Norhafizah Rosman) PP 93-102Document10 pages14.ergonomic Workstation Design For Science Laboratory (Norhafizah Rosman) PP 93-102upenapahangPas encore d'évaluation
- Is 800-2007 - Indian Code of Practice For Construction in SteelDocument41 pagesIs 800-2007 - Indian Code of Practice For Construction in SteelshiivendraPas encore d'évaluation
- TEMPLATE - MODULE 5 - 8 Step Change Management WorksheetDocument9 pagesTEMPLATE - MODULE 5 - 8 Step Change Management Worksheetapril75Pas encore d'évaluation
- Enabling Secure Broadband Access Anywhere Anytime Access Anywhere, AnytimeDocument4 pagesEnabling Secure Broadband Access Anywhere Anytime Access Anywhere, AnytimeEmmanuelPas encore d'évaluation
- Connecting Your Database and Auto Generate ID Using VB - Net 2008 and MySQL DatabaseDocument1 pageConnecting Your Database and Auto Generate ID Using VB - Net 2008 and MySQL DatabaseAgusWibowoPas encore d'évaluation
- Hw1 2 SolutionsDocument7 pagesHw1 2 SolutionsFrancisco AlvesPas encore d'évaluation
- Thermo 5th Chap17 P096Document19 pagesThermo 5th Chap17 P096UTA - Std - Elvin ChantrePas encore d'évaluation
- Comparing Registers: MIPS vs. ARM AssemblyDocument12 pagesComparing Registers: MIPS vs. ARM Assemblyshruti chouhanPas encore d'évaluation
- Urban Problems and SolutionsDocument12 pagesUrban Problems and SolutionsJohn Lloyd Agapito50% (2)
- 20-12-11 Ericsson V, Samsung EDTX ComplaintDocument22 pages20-12-11 Ericsson V, Samsung EDTX ComplaintFlorian MuellerPas encore d'évaluation
- Equinoxes and Solstices: UttarayanamDocument2 pagesEquinoxes and Solstices: UttarayanamRahul SharmaPas encore d'évaluation
- Pertemuan 1 - Verb, Noun, Adjective and AdverbDocument6 pagesPertemuan 1 - Verb, Noun, Adjective and AdverbHaris PambudiPas encore d'évaluation
- Dr./Ar. Jocelyn A. Rivera-Lutap, Fuap, FriaDocument1 pageDr./Ar. Jocelyn A. Rivera-Lutap, Fuap, FriaShanaia BualPas encore d'évaluation