Vous aimerez peut-être aussi
- Projects With Microcontrollers And PICCD'EverandProjects With Microcontrollers And PICCÉvaluation : 5 sur 5 étoiles5/5 (1)
- Código+ (3) MPU6050Document3 pagesCódigo+ (3) MPU6050Paulo CezarioPas encore d'évaluation
- Arduino Adxl335 Accelerometer Interfacing With Arduino UnoDocument4 pagesArduino Adxl335 Accelerometer Interfacing With Arduino UnoedePas encore d'évaluation
- ADXL335Document7 pagesADXL335ZidNa Munif MuhammadPas encore d'évaluation
- Arduino Earthquake CodeDocument3 pagesArduino Earthquake Codekimchen edenellePas encore d'évaluation
- Week 5 Progress ReportDocument11 pagesWeek 5 Progress Reportmorris gichuhiPas encore d'évaluation
- ADXL335 Interfacing With AVRDocument10 pagesADXL335 Interfacing With AVRvikas kumar sahPas encore d'évaluation
- AppendicesDocument5 pagesAppendicesRyan Ceasar MianoPas encore d'évaluation
- LastDocument5 pagesLastThinh HoangPas encore d'évaluation
- Arduino - Control ESC - Motor (Arduino Code)Document7 pagesArduino - Control ESC - Motor (Arduino Code)ordenador90Pas encore d'évaluation
- CodeDocument9 pagesCodeMuHammad TaHir HasSanPas encore d'évaluation
- Smartboard Arduinomega V1Document16 pagesSmartboard Arduinomega V1Camera CamPas encore d'évaluation
- Arduino MPU6050Document3 pagesArduino MPU6050Ricky PerezPas encore d'évaluation
- Evse ChargerDocument17 pagesEvse ChargerdkvnsyvkgbPas encore d'évaluation
- CNC Processing I3Document17 pagesCNC Processing I3Kol SambathPas encore d'évaluation
- CD C:/Users/fabi/Documents/Arduino/hardware/espressif/esp32: #IncludeDocument15 pagesCD C:/Users/fabi/Documents/Arduino/hardware/espressif/esp32: #Includenaibaf naibafPas encore d'évaluation
- Accelerometer MPU6050 Z-Axis 0-90-Degrees PWMDocument3 pagesAccelerometer MPU6050 Z-Axis 0-90-Degrees PWMDariusz BartniakPas encore d'évaluation
- Generador de Onda Senoidal: FS/Fo N Fo 490/30 FO 16.3HzDocument5 pagesGenerador de Onda Senoidal: FS/Fo N Fo 490/30 FO 16.3Hzbryan mezaPas encore d'évaluation
- Sum Gyro Itg3200Document7 pagesSum Gyro Itg3200Rosana FariaPas encore d'évaluation
- IoT Lab ManualDocument47 pagesIoT Lab Manuald20z101Pas encore d'évaluation
- GSMDocument2 pagesGSMDINESH kothurthiPas encore d'évaluation
- Lab06 - Smart Home Automation Using SensorsDocument14 pagesLab06 - Smart Home Automation Using SensorsChâu Trần100% (1)
- MPU6050 6-Axis Accelerometer and Gyro: Created by Bryan SiepertDocument19 pagesMPU6050 6-Axis Accelerometer and Gyro: Created by Bryan Siepertdavid suwarno sukartoPas encore d'évaluation
- Esp32 Et MQTTDocument7 pagesEsp32 Et MQTTLlouis PhysicsPas encore d'évaluation
- ADXL345 Sensor I2C InterfaceDocument5 pagesADXL345 Sensor I2C Interfaceavi kishuPas encore d'évaluation
- Using Inline Assembly in CDocument7 pagesUsing Inline Assembly in Cron_cppPas encore d'évaluation
- Smart Garbage Collection Using Node McuDocument10 pagesSmart Garbage Collection Using Node McuSonia MohapatraPas encore d'évaluation
- Lab7 Task02Document6 pagesLab7 Task02Junaid AkhtarPas encore d'évaluation
- Heliberto FinalDocument7 pagesHeliberto FinalAlvaro ZapataPas encore d'évaluation
- Drone Hacker 123Document13 pagesDrone Hacker 123Anonymous 3yqNzCxtTzPas encore d'évaluation
- Ardu5 para S4ADocument6 pagesArdu5 para S4AEDWARD ENRIQUE ROJAS BARBOSAPas encore d'évaluation
- Manual Adjust For RTC Clock With Arduino and 7-Segment LEDDocument21 pagesManual Adjust For RTC Clock With Arduino and 7-Segment LEDfrasekh100% (1)
- Whatsapp Bloker and Haking Tool KitDocument2 359 pagesWhatsapp Bloker and Haking Tool KitAaditya KhannaPas encore d'évaluation
- Build An ESP8266 Web ServerDocument21 pagesBuild An ESP8266 Web Serverpinguino2820100% (1)
- Arduino Spectum AnalyzerDocument4 pagesArduino Spectum Analyzernguyen van ANPas encore d'évaluation
- Instruction HandbotDocument18 pagesInstruction HandbotHaafizee FizPas encore d'évaluation
- Hercules Importante UartDocument9 pagesHercules Importante UartAnyiCorderoPas encore d'évaluation
- Tutorial For Esp8266 Serial Wifi ModuleDocument3 pagesTutorial For Esp8266 Serial Wifi ModuleRajaAtifPas encore d'évaluation
- Tutorial For Esp8266 Serial Wifi ModuleDocument3 pagesTutorial For Esp8266 Serial Wifi ModuleRRTRTPas encore d'évaluation
- Define BLYNKDocument5 pagesDefine BLYNKyanuartw7Pas encore d'évaluation
- Activity 1 MicroDocument5 pagesActivity 1 MicroAldrin taduranPas encore d'évaluation
- Source Code-234Document9 pagesSource Code-234Bryan Joshua SalvidarPas encore d'évaluation
- Robotic Arm Circuit and CodesDocument4 pagesRobotic Arm Circuit and CodesMutasim.Ali75% (4)
- Control JoystickDocument2 pagesControl JoystickAdochieiBogdanPas encore d'évaluation
- MMA7361 Accelerometer Basics Arduino CodeDocument2 pagesMMA7361 Accelerometer Basics Arduino CodeKisworo Diniantoro100% (4)
- Kalkulasi DataDocument1 pageKalkulasi Datarendi triPas encore d'évaluation
- SiguelineasDocument5 pagesSiguelineasjesPas encore d'évaluation
- 2 Axis Gimbal Brushless With l298nDocument9 pages2 Axis Gimbal Brushless With l298nMano OhanianPas encore d'évaluation
- Controlling NEMA-17 Stepper Motor Speed With Trimpot Without Using DelayDocument2 pagesControlling NEMA-17 Stepper Motor Speed With Trimpot Without Using DelaySandeep KumarPas encore d'évaluation
- Servo CDocument2 pagesServo Capi-340729449Pas encore d'évaluation
- Un Giroscopio: Materiales DroneDocument9 pagesUn Giroscopio: Materiales DroneJuan Carlos VásquezPas encore d'évaluation
- Aurduino 12345Document4 pagesAurduino 12345adershPas encore d'évaluation
- Wifi Module Interfacing With AVRDocument33 pagesWifi Module Interfacing With AVRMH 108812Pas encore d'évaluation
- Kirim Terima SMS & Panggilan Dengan Modul GSM SIM800L & ArduinoDocument5 pagesKirim Terima SMS & Panggilan Dengan Modul GSM SIM800L & ArduinoAriPermanaPas encore d'évaluation
- UntitledDocument5 pagesUntitledMuhammad Aneeb KhanPas encore d'évaluation
- GSM ArduinoDocument6 pagesGSM ArduinoAlex LopesPas encore d'évaluation
- AnexeDocument5 pagesAnexemohamedPas encore d'évaluation
- Esp32 Ap From Web ServerDocument9 pagesEsp32 Ap From Web ServerPerez Geovanni100% (1)
- Basis CodesDocument15 pagesBasis CodesJholo LopezPas encore d'évaluation
- Southwest Airlines Group 1 7aces: Harvard Business School Case StudyDocument11 pagesSouthwest Airlines Group 1 7aces: Harvard Business School Case StudyAman KumarPas encore d'évaluation
- Phonepe: Vision - MissionDocument9 pagesPhonepe: Vision - MissionAman KumarPas encore d'évaluation
- Energy Generated 2043000 Total Plants 70 Per Plant 29185.7142857143 Number of Houses 27.0238095238095Document8 pagesEnergy Generated 2043000 Total Plants 70 Per Plant 29185.7142857143 Number of Houses 27.0238095238095Aman KumarPas encore d'évaluation
- Team 10 - OB - Sexual Harassment in The WorkplaceDocument17 pagesTeam 10 - OB - Sexual Harassment in The WorkplaceAman KumarPas encore d'évaluation
- Pedsim: Quick Start GuideDocument6 pagesPedsim: Quick Start GuideAntonio C. KeithPas encore d'évaluation
- Job Responsibilities and Skills Required - Versa ExperienceDocument2 pagesJob Responsibilities and Skills Required - Versa ExperienceSureshPas encore d'évaluation
- Prof. Navneet Goyal Computer Science Department BITS, PilaniDocument57 pagesProf. Navneet Goyal Computer Science Department BITS, Pilanibixanh0205Pas encore d'évaluation
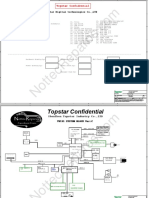
- Notebook Cce Ultrathin Esquema EletricoDocument50 pagesNotebook Cce Ultrathin Esquema EletricoAntônio AraújoPas encore d'évaluation
- MQTTDocument9 pagesMQTTAsistencia Técnica JLFPas encore d'évaluation
- TNB Lab 28.08.2020Document1 pageTNB Lab 28.08.2020Surendran RadhakrishnanPas encore d'évaluation
- Oracle Lab 4Document4 pagesOracle Lab 4Khanh TranPas encore d'évaluation
- The Forrester Wave™: Low-Code Development Platforms For AD&D Pros, Q4 2017Document21 pagesThe Forrester Wave™: Low-Code Development Platforms For AD&D Pros, Q4 2017Luis BarretoPas encore d'évaluation
- Exemple de Dissertation Sur Le CapitalismeDocument8 pagesExemple de Dissertation Sur Le CapitalismeCollegePaperHelpFargo100% (1)
- IPSecDocument25 pagesIPSecDinesh ParasharPas encore d'évaluation
- BladeSystem Firmware Update ProcedureDocument55 pagesBladeSystem Firmware Update Procedurests100Pas encore d'évaluation
- Ccna PART-2: Nasir Majeed Assistant Professor PTCL Academy IslamabadDocument152 pagesCcna PART-2: Nasir Majeed Assistant Professor PTCL Academy IslamabadmairajPas encore d'évaluation
- Amadeus Altea Administration Flight Management Business Rules UG May2016Document397 pagesAmadeus Altea Administration Flight Management Business Rules UG May2016Jose Pulido100% (5)
- Maab GuidelinesDocument392 pagesMaab GuidelinesabdelnaserPas encore d'évaluation
- GP Systems Interface Requirements v1 - Draft11Document22 pagesGP Systems Interface Requirements v1 - Draft11EwanDavisPas encore d'évaluation
- 1m Machine Assembly Manual PDFDocument39 pages1m Machine Assembly Manual PDFjavier acuñaPas encore d'évaluation
- eFRS Presentation - ADASDocument45 pageseFRS Presentation - ADASEijneb OptionalPas encore d'évaluation
- International Baccalaureate (IB) Past Papers With Mark SchemesDocument128 pagesInternational Baccalaureate (IB) Past Papers With Mark SchemesFirasco24% (42)
- Invexport All Brokerbin NewestDocument580 pagesInvexport All Brokerbin NewestrenuPas encore d'évaluation
- D3E800891BA-Automatic Transmission On Board Diagnostic PDFDocument61 pagesD3E800891BA-Automatic Transmission On Board Diagnostic PDFMircea Butca100% (1)
- Priyanka Kumari: Work ExperienceDocument1 pagePriyanka Kumari: Work ExperienceTilak RajPas encore d'évaluation
- Commissioning and Integration LTE DUS - DULDocument5 pagesCommissioning and Integration LTE DUS - DULColour BlindPas encore d'évaluation
- Computer Science, 9618 Home Assignment (35 Marks)Document5 pagesComputer Science, 9618 Home Assignment (35 Marks)Saurya PandeyPas encore d'évaluation
- IQBots Introduction Assessment3Document2 pagesIQBots Introduction Assessment3fjgutierrezpa63% (8)
- Cyber Safety - FinalDocument16 pagesCyber Safety - Finalkushagra khatriPas encore d'évaluation
- Improving Throughput and Availability of Cellular Digital Packet Data (CDPD)Document12 pagesImproving Throughput and Availability of Cellular Digital Packet Data (CDPD)Hao WangPas encore d'évaluation
- Crash ReportDocument2 pagesCrash ReportLidia GheraliuPas encore d'évaluation
- Rot Op Robe ExDocument2 pagesRot Op Robe ExSiva KumarPas encore d'évaluation
- Coating Thickness Gages: Instruction Manual V. 7.1Document30 pagesCoating Thickness Gages: Instruction Manual V. 7.1Hayderr HassPas encore d'évaluation
- Computer Fundamentals and Programming in C: Reema TharejaDocument19 pagesComputer Fundamentals and Programming in C: Reema TharejaChandan Nagesh0% (1)