Vous aimerez peut-être aussi
- TF MTI Barbarossa FarinaDocument9 pagesTF MTI Barbarossa FarinaAsnarf EbraPas encore d'évaluation
- Low-Cost and High Resolution X-Band Laboratory Radar System For Synthetic Aperture Radar ApplicationsDocument6 pagesLow-Cost and High Resolution X-Band Laboratory Radar System For Synthetic Aperture Radar ApplicationsworkhardplayhardPas encore d'évaluation
- Four-Wave Mixing in Optical Fibers and Its ApplicationsDocument6 pagesFour-Wave Mixing in Optical Fibers and Its Applicationsgjohnson1968Pas encore d'évaluation
- S-Band 2.4GHz FMCW RadarDocument15 pagesS-Band 2.4GHz FMCW RadarNamePas encore d'évaluation
- A High Resolution Algorithm Based On ChirpDocument3 pagesA High Resolution Algorithm Based On ChirpMartin Ariel ReyesPas encore d'évaluation
- C-Band 5.6GHz FMCW RadarDocument20 pagesC-Band 5.6GHz FMCW RadarNamePas encore d'évaluation
- VHF Radar Target Detection in The Presence of Clutter: Boriana VassilevaDocument8 pagesVHF Radar Target Detection in The Presence of Clutter: Boriana VassilevaGhada HamzaPas encore d'évaluation
- Radar Questions & AnswersDocument13 pagesRadar Questions & AnswersNuzhath FathimaPas encore d'évaluation
- Range Gate Generator For FMCW Doppler Raradr PDFDocument5 pagesRange Gate Generator For FMCW Doppler Raradr PDFSrinivas CherukuPas encore d'évaluation
- Some Radar Topics: Waveform Design, Range Cfar and Target RecognitionDocument30 pagesSome Radar Topics: Waveform Design, Range Cfar and Target Recognitiontrilok1508Pas encore d'évaluation
- Equency Mesurement by DopplerDocument9 pagesEquency Mesurement by DopplerAnume123Pas encore d'évaluation
- Detection Performance of Distributed MIMO Radar With Asynchronous Propagation and Timing Phase ErrorsDocument6 pagesDetection Performance of Distributed MIMO Radar With Asynchronous Propagation and Timing Phase Errorsdhyan shahPas encore d'évaluation
- Progress in Electromagnetics Research C, Vol. 16, 69-84, 2010Document16 pagesProgress in Electromagnetics Research C, Vol. 16, 69-84, 2010Ahmed HussainPas encore d'évaluation
- Sensors 18 02831Document11 pagesSensors 18 02831FAISAL RAHIMPas encore d'évaluation
- Radar Radio Detection and Ranging Part 1 of 2: ApplicationsDocument11 pagesRadar Radio Detection and Ranging Part 1 of 2: ApplicationsArtur LevikinPas encore d'évaluation
- Short Notes On RADARDocument11 pagesShort Notes On RADARAbhijith NarendranPas encore d'évaluation
- Detection Performance of Distributed MIMO Radar With Asynchronous Propagation and Timing/Phase ErrorsDocument6 pagesDetection Performance of Distributed MIMO Radar With Asynchronous Propagation and Timing/Phase Errorsrahul kumarPas encore d'évaluation
- Radar KT Lect5Document12 pagesRadar KT Lect5ojasvi kathuriaPas encore d'évaluation
- Unit 4Document21 pagesUnit 4Tammaneni NavyaPas encore d'évaluation
- Unit-II FMCW Radar UpdatedDocument11 pagesUnit-II FMCW Radar UpdatedChennam VaishnaviPas encore d'évaluation
- 3.5 Applications of CW RadarsDocument13 pages3.5 Applications of CW Radars2121x3ssssssssssPas encore d'évaluation
- Range FMCW: Performance Analysis in Linear RadarDocument4 pagesRange FMCW: Performance Analysis in Linear RadarSrinivas CherukuPas encore d'évaluation
- Unit 2 - Radar Engineering - WWW - Rgpvnotes.inDocument16 pagesUnit 2 - Radar Engineering - WWW - Rgpvnotes.inPranav ChaturvediPas encore d'évaluation
- Part I-Radar: Continuous Wave RadarsDocument25 pagesPart I-Radar: Continuous Wave RadarsdangkitaPas encore d'évaluation
- Project ProposalDocument19 pagesProject ProposalSougat Dhungel100% (2)
- Spatial Filtering in A Broadband In-Home OFDM Radio-Over-Fiber NetworkDocument4 pagesSpatial Filtering in A Broadband In-Home OFDM Radio-Over-Fiber Networkloga rajesh waranPas encore d'évaluation
- Mathematical Description of OFDMDocument8 pagesMathematical Description of OFDMthegioiphang_1604Pas encore d'évaluation
- TDFO-FDA-RECEIVER JoE ModDocument9 pagesTDFO-FDA-RECEIVER JoE ModWaseem KhanPas encore d'évaluation
- Sensors: Frequency-Coded Chipless RFID Tags: Notch Model, Detection, Angular Orientation, and Coverage MeasurementsDocument16 pagesSensors: Frequency-Coded Chipless RFID Tags: Notch Model, Detection, Angular Orientation, and Coverage MeasurementsDARWIN ARMIJOSPas encore d'évaluation
- R Rec P.526 14 201801 I!!pdf e PDFDocument45 pagesR Rec P.526 14 201801 I!!pdf e PDFJuan MatiasPas encore d'évaluation
- 1-Detection of Weak Moving Targets Based On 2-D Range-Doppler FMCW Radar Fourier ProcessingDocument4 pages1-Detection of Weak Moving Targets Based On 2-D Range-Doppler FMCW Radar Fourier ProcessingPAULO CÉSAR RIBEIRO MARCIANOPas encore d'évaluation
- Waveform Design Principles For Automotive Radar SystemsDocument4 pagesWaveform Design Principles For Automotive Radar Systemswho3Pas encore d'évaluation
- Real Time Implementation of FMCW Radar FDocument5 pagesReal Time Implementation of FMCW Radar FAfaq Ahmed Shaikh100% (1)
- Spectral Analysis and Filtering Techniques in Digital Spatial Data ProcessingDocument5 pagesSpectral Analysis and Filtering Techniques in Digital Spatial Data ProcessingMay Thet TunPas encore d'évaluation
- R Rec P.525 3 201611 I!!pdf eDocument6 pagesR Rec P.525 3 201611 I!!pdf eJuan MatiasPas encore d'évaluation
- Impacts of Mutual Interference Analysis in FMCW Automotive RadarDocument5 pagesImpacts of Mutual Interference Analysis in FMCW Automotive RadarRifaqat HussainPas encore d'évaluation
- FMCW Radar Implemented With GNU Radio Companion: Master ThesisDocument20 pagesFMCW Radar Implemented With GNU Radio Companion: Master ThesisFannush Shofi AkbarPas encore d'évaluation
- Automotive Radar - Waveform Design PrinciplesDocument4 pagesAutomotive Radar - Waveform Design PrinciplesAarav K SPas encore d'évaluation
- Microwave FMCW RadarDocument48 pagesMicrowave FMCW RadarPranabKumarGoswami100% (1)
- 05 WCNC'12Document5 pages05 WCNC'12Abdul RahimPas encore d'évaluation
- 5005 SCDocument6 pages5005 SCneerajPas encore d'évaluation
- Aspects of Delay Diversity in Ofdm: Gerhard Bauch Docomo Euro-Labs Landsberger Strasse 312, 80687 Munich, GermanyDocument9 pagesAspects of Delay Diversity in Ofdm: Gerhard Bauch Docomo Euro-Labs Landsberger Strasse 312, 80687 Munich, GermanyRoshniPas encore d'évaluation
- Lecture 6Document13 pagesLecture 6Hari Manoj Ram GandrothuPas encore d'évaluation
- Usrp 4Document6 pagesUsrp 4Vanidevi ManiPas encore d'évaluation
- Frequency-Modulated Continuous Wave Ranging: Basic PrincipleDocument9 pagesFrequency-Modulated Continuous Wave Ranging: Basic PrinciplePedro IvanPas encore d'évaluation
- AWR1243 Sensor: Highly Integrated 76-81-GHz Radar Front-End For Emerging ADAS ApplicationsDocument12 pagesAWR1243 Sensor: Highly Integrated 76-81-GHz Radar Front-End For Emerging ADAS ApplicationsVasikaran PrabaharanPas encore d'évaluation
- Radar Systems - Unit-4 PDFDocument136 pagesRadar Systems - Unit-4 PDFMuthireddy Sri SanthoshiPas encore d'évaluation
- Part 02 B - Multi Carrier Signals With WinIQSIM v0Document21 pagesPart 02 B - Multi Carrier Signals With WinIQSIM v0Thierry IRIEPas encore d'évaluation
- A Target Detection Scheme With Decreased Complexity and Enhanced Performance For Range-Doppler FMCW RadarDocument13 pagesA Target Detection Scheme With Decreased Complexity and Enhanced Performance For Range-Doppler FMCW RadarPAULO CÉSAR RIBEIRO MARCIANOPas encore d'évaluation
- Feasibility Analysis of Utilizing The 8k Mode' DVB-T Signal in Passive Radar ApplicationsDocument8 pagesFeasibility Analysis of Utilizing The 8k Mode' DVB-T Signal in Passive Radar ApplicationssafaPas encore d'évaluation
- Radar ProblemsDocument18 pagesRadar Problemssaiful azaharPas encore d'évaluation
- Deception Jammer Rejection Using Pulse Diversity in Joint Slow Fast Time DomainDocument7 pagesDeception Jammer Rejection Using Pulse Diversity in Joint Slow Fast Time DomainAhmed HussainPas encore d'évaluation
- Ecomms s07 MidtermDocument7 pagesEcomms s07 MidtermJos2Pas encore d'évaluation
- Carrier Frequency Synchronization in The Downlink of 3Gpp LteDocument6 pagesCarrier Frequency Synchronization in The Downlink of 3Gpp LteAshok KumarPas encore d'évaluation
- Non-Coherent Multiuser Massive MIMO-OFDM With Differential ModulationDocument6 pagesNon-Coherent Multiuser Massive MIMO-OFDM With Differential ModulationKarim Abd El HamidPas encore d'évaluation
- Basics of Radar EMTDocument7 pagesBasics of Radar EMTSHASHANK AGRAHARIPas encore d'évaluation
- 3-Low-Complexity Joint Range and Doppler FMCW Radar Algorithm Based On Number of TargetsDocument14 pages3-Low-Complexity Joint Range and Doppler FMCW Radar Algorithm Based On Number of TargetsPAULO CÉSAR RIBEIRO MARCIANOPas encore d'évaluation
- Radio Propagation and Adaptive Antennas for Wireless Communication Networks: Terrestrial, Atmospheric, and IonosphericD'EverandRadio Propagation and Adaptive Antennas for Wireless Communication Networks: Terrestrial, Atmospheric, and IonosphericPas encore d'évaluation
- Negotin 682 Reviewer Digests 2Document51 pagesNegotin 682 Reviewer Digests 2Divine Grace BurmalPas encore d'évaluation
- GravityDocument2 pagesGravityDivine Grace BurmalPas encore d'évaluation
- RESPONSE TIME - Definition in The Cambridge English DictionaryDocument7 pagesRESPONSE TIME - Definition in The Cambridge English DictionaryDivine Grace BurmalPas encore d'évaluation
- Astro Electronics Corp. & Peter Roxas V. Philippine Export and Foreign Loan Guarantee Corporation G.R. No. 136729 September 23, 2003Document1 pageAstro Electronics Corp. & Peter Roxas V. Philippine Export and Foreign Loan Guarantee Corporation G.R. No. 136729 September 23, 2003Divine Grace BurmalPas encore d'évaluation
- A Comprehensive Examination of Naturalistic Lane-ChangesDocument236 pagesA Comprehensive Examination of Naturalistic Lane-ChangesDivine Grace BurmalPas encore d'évaluation
- J2802 - Blind Spot Monitoring System (BSMS) - Operating Characteristics and User Interface - SAE InternationalDocument1 pageJ2802 - Blind Spot Monitoring System (BSMS) - Operating Characteristics and User Interface - SAE InternationalDivine Grace BurmalPas encore d'évaluation
- RAM, ROM, and Flash Memory - DummiesDocument2 pagesRAM, ROM, and Flash Memory - DummiesDivine Grace BurmalPas encore d'évaluation
- Robust and Efficient Multi-Object Detection and Tracking For Vehicle Perception Systems Using Radar and CameraDocument6 pagesRobust and Efficient Multi-Object Detection and Tracking For Vehicle Perception Systems Using Radar and CameraDivine Grace BurmalPas encore d'évaluation
- ISO 17387 - 2008 (En), Intelligent Transport SystemsDocument1 pageISO 17387 - 2008 (En), Intelligent Transport SystemsDivine Grace BurmalPas encore d'évaluation
- Automatic Motorcycle Detection On Public Roads PDFDocument9 pagesAutomatic Motorcycle Detection On Public Roads PDFDivine Grace BurmalPas encore d'évaluation
- (Francesco - Flammini, - Francesco - Flammini) - Railway Safety, Reliability and SecurityDocument488 pages(Francesco - Flammini, - Francesco - Flammini) - Railway Safety, Reliability and Securityperry.stamatiouPas encore d'évaluation
- Middleware Seminar ReportDocument22 pagesMiddleware Seminar ReportSudipta Dhara33% (3)
- Pengenalan Dan Pemanfaatan Marketplace E-Commerce Untuk Pelaku Ukm Wilayah CilegonDocument8 pagesPengenalan Dan Pemanfaatan Marketplace E-Commerce Untuk Pelaku Ukm Wilayah CilegonPemetaanPendidikanPas encore d'évaluation
- Marshalling Box Is A Type of Box Which Is Connected at One Side of Transformer. ItDocument1 pageMarshalling Box Is A Type of Box Which Is Connected at One Side of Transformer. ItvigneshwarannnPas encore d'évaluation
- LB2-UCxx-x Premium-Sound Cabinet Loudspeaker Range Data Sheet EnUSDocument6 pagesLB2-UCxx-x Premium-Sound Cabinet Loudspeaker Range Data Sheet EnUSvtcuongPas encore d'évaluation
- Indicative FQP-for Structural SteelDocument14 pagesIndicative FQP-for Structural SteelghansaPas encore d'évaluation
- DHCP Presentation 01Document20 pagesDHCP Presentation 01rhariharan_13Pas encore d'évaluation
- Republic of The Philippines Quezon City Branch: T C 1 P U"Document8 pagesRepublic of The Philippines Quezon City Branch: T C 1 P U"Kim john defiestaPas encore d'évaluation
- Prismaflex 8.1: For Continuous Extracorporeal Blood Purification TherapiesDocument2 pagesPrismaflex 8.1: For Continuous Extracorporeal Blood Purification TherapiesIftekhar AhamedPas encore d'évaluation
- Application of JIT in Toyota in IndiaDocument2 pagesApplication of JIT in Toyota in IndiaAru BhartiPas encore d'évaluation
- Amali 3Document4 pagesAmali 3CIK JOYAHPas encore d'évaluation
- Hydra Check ListDocument1 pageHydra Check ListBhargav BbvsPas encore d'évaluation
- Brochure South DL202Document2 pagesBrochure South DL202jimmyPas encore d'évaluation
- WQR XQ Jhs Mu NW 4 Opj AJ6 N 1643617492Document16 pagesWQR XQ Jhs Mu NW 4 Opj AJ6 N 1643617492Heamnath HeamnathPas encore d'évaluation
- The - hitmans.bodyguard.2017.HDRip - xvid.AC3 EVODocument1 pageThe - hitmans.bodyguard.2017.HDRip - xvid.AC3 EVORAMAKRISHNAN RPas encore d'évaluation
- Locala 11B SubiectDocument5 pagesLocala 11B SubiectAndrei SainciucPas encore d'évaluation
- Ge - Mpact Mpro Acb (400a - 4000a)Document48 pagesGe - Mpact Mpro Acb (400a - 4000a)Sugumaran100% (1)
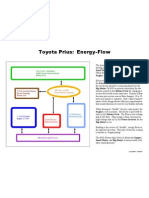
- Prius Energy FlowDocument1 pagePrius Energy Flowmsfz751Pas encore d'évaluation
- Computer NetworksDocument90 pagesComputer NetworkslalithaPas encore d'évaluation
- Excel VBA Dictionary - A Complete Guide - Excel Macro MasteryDocument56 pagesExcel VBA Dictionary - A Complete Guide - Excel Macro MasteryWong Yew LeongPas encore d'évaluation
- Mandriva Linux One 2009: Starter GuideDocument10 pagesMandriva Linux One 2009: Starter GuideDarren JayPas encore d'évaluation
- Adam PMB53 Moisture Analyzer User ManualDocument84 pagesAdam PMB53 Moisture Analyzer User Manualpwrage6561Pas encore d'évaluation
- Ahoy Bookaneers! Ela Meagan Oakley: 2 Classes at Each Grade LevelDocument8 pagesAhoy Bookaneers! Ela Meagan Oakley: 2 Classes at Each Grade Levelmeaganlee86Pas encore d'évaluation
- NFE10 Master Guide en v13Document26 pagesNFE10 Master Guide en v13dri0510Pas encore d'évaluation
- Computerized Support Systems in Nuclear Power Plants: IAEA-TECDOC-912Document190 pagesComputerized Support Systems in Nuclear Power Plants: IAEA-TECDOC-912jermPas encore d'évaluation
- HIAB14000XGDocument267 pagesHIAB14000XGMiguePas encore d'évaluation
- DataPrivilege 5.8 Users Quick Start GuideDocument36 pagesDataPrivilege 5.8 Users Quick Start GuidePatricio Espíndola HernandezPas encore d'évaluation
- Project SchedulingDocument61 pagesProject SchedulingGummanur SreenathPas encore d'évaluation
- Conti Leaked Playbook TTPsDocument8 pagesConti Leaked Playbook TTPsTerry GilliganPas encore d'évaluation
- A320 NEO Abbreviations LEAP-1ADocument5 pagesA320 NEO Abbreviations LEAP-1AwenjukwaxPas encore d'évaluation