Vous aimerez peut-être aussi
- Comprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109D'EverandComprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109Pas encore d'évaluation
- 3ABC Rejillas y DesarenadoresDocument31 pages3ABC Rejillas y DesarenadoresJuan AyalaPas encore d'évaluation
- Caja de HerramientasDocument2 pagesCaja de Herramientasjose garciaPas encore d'évaluation
- Mecanica Basica en GeneralDocument11 pagesMecanica Basica en GeneralElvisMendozaRamosPas encore d'évaluation
- Anexo 6.4.5 Cimentación de RetenidaDocument8 pagesAnexo 6.4.5 Cimentación de RetenidaLeandro Leao ZeballosPas encore d'évaluation
- Métodos de trabajo y utilización de aparatos, equipos y útiles topográficos. AGAJ0308D'EverandMétodos de trabajo y utilización de aparatos, equipos y útiles topográficos. AGAJ0308Pas encore d'évaluation
- Api 8C EspañolDocument72 pagesApi 8C Españolgustavo animas100% (5)
- Planchas Fisica 1Document209 pagesPlanchas Fisica 1Jean carlos Patala sanchez0% (1)
- UF1253 - Diagnóstico de deformaciones estructuralesD'EverandUF1253 - Diagnóstico de deformaciones estructuralesPas encore d'évaluation
- Motor Paso A Paso LabVIEWDocument14 pagesMotor Paso A Paso LabVIEWLeonardoCamposVazquezPas encore d'évaluation
- Ejercicios de Integrales de Línea, Superficie y VolumenD'EverandEjercicios de Integrales de Línea, Superficie y VolumenÉvaluation : 4 sur 5 étoiles4/5 (2)
- Interpolación PolinómicaDocument35 pagesInterpolación PolinómicaPablo Padilla100% (2)
- Tabla Composicion de Los Alimentos VenezuelaDocument45 pagesTabla Composicion de Los Alimentos VenezuelaMiguel PeñaPas encore d'évaluation
- Deber 3 - Cinemática de Robots IndustrialesDocument5 pagesDeber 3 - Cinemática de Robots IndustrialesCristian UrrestaPas encore d'évaluation
- WPSDocument2 pagesWPSStalin AriasPas encore d'évaluation
- Experiencia 2 Lab FisicaDocument14 pagesExperiencia 2 Lab FisicaRichard Gutierrez ParedesPas encore d'évaluation
- Informe Mru MruvDocument18 pagesInforme Mru MruvLesly VilchezPas encore d'évaluation
- Programa de Fisica AplicadaDocument4 pagesPrograma de Fisica AplicadaajumayenaPas encore d'évaluation
- Lab 15 Simulacion Del Pendulo Invertido y Control Difuso PDFDocument9 pagesLab 15 Simulacion Del Pendulo Invertido y Control Difuso PDFoscarlalilagosPas encore d'évaluation
- Entrega Final ProyectoDocument12 pagesEntrega Final ProyectoHollman BecerraPas encore d'évaluation
- GUÍA DE LABORATORIO: Análisis de Velocidad de Un Mecanismo PlanoDocument8 pagesGUÍA DE LABORATORIO: Análisis de Velocidad de Un Mecanismo PlanoJack LutPas encore d'évaluation
- ECR - 2074392 - Practica 2B - Lab. DinamicaDocument9 pagesECR - 2074392 - Practica 2B - Lab. DinamicaJennifer LunaPas encore d'évaluation
- Análisis Cinemático Del Mecanismo PlanoDocument9 pagesAnálisis Cinemático Del Mecanismo PlanoHarold Ramirez De La TorrePas encore d'évaluation
- Practica1 Cinemática Fi UnamDocument12 pagesPractica1 Cinemática Fi UnamJosé Luis OlivaresPas encore d'évaluation
- Informe MRUADocument15 pagesInforme MRUAGastón Ernesto Urrutia CandiaPas encore d'évaluation
- Implementación de Un Robot Con Dos Grados de Libertad (Cinemática)Document9 pagesImplementación de Un Robot Con Dos Grados de Libertad (Cinemática)Israel Jacob Abarca MoralesPas encore d'évaluation
- Guia ControlDocument7 pagesGuia Controlvictor fernandezPas encore d'évaluation
- Biela ManivelaDocument10 pagesBiela ManivelaDoris YujraPas encore d'évaluation
- Perfil de VelocidadDocument7 pagesPerfil de VelocidadVíctor Beltrán BarreraPas encore d'évaluation
- Lab 4Document5 pagesLab 4fermio2350% (2)
- Guía 6 MRUA-lab. Fisica I-Gral - Cassy Lab 2Document4 pagesGuía 6 MRUA-lab. Fisica I-Gral - Cassy Lab 2Diego Marcelo Cuaical0% (1)
- Inf2 Rob2Document13 pagesInf2 Rob2Marco Moya MontesPas encore d'évaluation
- Practica 2B ANÁLISIS CINEMÁTICO DE ACELERACIONES DE MECANISMOS MBCDocument6 pagesPractica 2B ANÁLISIS CINEMÁTICO DE ACELERACIONES DE MECANISMOS MBCDiego CorpusPas encore d'évaluation
- Ex1020-Práctica1-Movilidad de MecanismosDocument10 pagesEx1020-Práctica1-Movilidad de MecanismosDavid Soler OrtizPas encore d'évaluation
- LCD27 Pr01 Br01Document15 pagesLCD27 Pr01 Br01Martínez Téllez Christian FernandoPas encore d'évaluation
- Mecanismo de Biela ManivelaDocument10 pagesMecanismo de Biela ManivelaAlejandroCalleRuizPas encore d'évaluation
- Diseño Controlador de Velocidad Mediante LGR para Un Motor DC1Document12 pagesDiseño Controlador de Velocidad Mediante LGR para Un Motor DC1johnpiryuk100% (1)
- Proyecto de CinematicaDocument7 pagesProyecto de CinematicaDennys Quimi BorborPas encore d'évaluation
- Análisis de Un Sistema de ControlDocument60 pagesAnálisis de Un Sistema de ControlJesus Leobardo Garza GarzaPas encore d'évaluation
- Practica 3 MecDocument17 pagesPractica 3 MecMarckuz MendietaPas encore d'évaluation
- Grua ViajeraDocument12 pagesGrua ViajeraSantiago Hernadez RodriguezPas encore d'évaluation
- Pilotes - Metodo EquivalenteDocument13 pagesPilotes - Metodo EquivalenteWermer Melgar Gutierrez100% (1)
- Informe de LaboratorioDocument17 pagesInforme de LaboratorioAnna PorrasPas encore d'évaluation
- Movimiento Rectilíneo. Ismael Pacheco VilledaDocument9 pagesMovimiento Rectilíneo. Ismael Pacheco VilledaIsmael Pacheco VilledaPas encore d'évaluation
- Biela Manivela Ale TerminadoDocument9 pagesBiela Manivela Ale Terminado120ryPas encore d'évaluation
- Trabajo 1 Control SISO AlexisZDocument22 pagesTrabajo 1 Control SISO AlexisZJason GreenPas encore d'évaluation
- Tarea de Aplicacion 2 DinamicaDocument12 pagesTarea de Aplicacion 2 Dinamicawilliam pacasPas encore d'évaluation
- Proyecto TransitoDocument14 pagesProyecto TransitoCristian QuinteroPas encore d'évaluation
- Análisis Cinemático de Un Mecanismo ArticuladoDocument18 pagesAnálisis Cinemático de Un Mecanismo ArticuladoAlfredo Merizalde AvilesPas encore d'évaluation
- Laboratorio 6Document17 pagesLaboratorio 6turkebarzaPas encore d'évaluation
- Informe Mru MruvDocument17 pagesInforme Mru MruvMishelle GuzmánPas encore d'évaluation
- Preinforme Física5Document3 pagesPreinforme Física5IsabelaGiraldoBadillo0% (1)
- Guia Practica Alternativa 5Document12 pagesGuia Practica Alternativa 5Nadewrwerewra0% (1)
- Informe Movimiento Rectilineo Uniformemente AceleradoDocument20 pagesInforme Movimiento Rectilineo Uniformemente Aceleradoana mariaPas encore d'évaluation
- TareaN4 RoboticaAplicadaDocument7 pagesTareaN4 RoboticaAplicadaAland BravoPas encore d'évaluation
- PeralteDocument5 pagesPeralteCatalina MayorgaPas encore d'évaluation
- Imagen de VelocidadesDocument17 pagesImagen de VelocidadesFerNandoPas encore d'évaluation
- Informe Lab FisicaDocument9 pagesInforme Lab FisicaVictor ArmandoPas encore d'évaluation
- Tema #2: Descripción de Mecanismos y Elementos de MáquinasDocument10 pagesTema #2: Descripción de Mecanismos y Elementos de MáquinasMiguel LvCasPas encore d'évaluation
- Reporte de Laboratorio 3Document13 pagesReporte de Laboratorio 3Renzo ZevallosPas encore d'évaluation
- Práctica 4 (Inf)Document24 pagesPráctica 4 (Inf)Pablo PulachePas encore d'évaluation
- Control PD SiguelineasDocument6 pagesControl PD SiguelineasJose GayossoPas encore d'évaluation
- Análisis Cinemático Del Movimiento Rectilíneo UniformeDocument13 pagesAnálisis Cinemático Del Movimiento Rectilíneo UniformeDylan Mejia LopezPas encore d'évaluation
- Modelado y Control de Robot AntropomorficoDocument7 pagesModelado y Control de Robot AntropomorficoKapi KisukePas encore d'évaluation
- Movimiento de Traslación y RotaciónDocument9 pagesMovimiento de Traslación y RotaciónKmilo OspinaPas encore d'évaluation
- Diseño de Maquina de Goldberg para Automatización en El Sector de La Construcción Con Principios Físico MecánicosDocument7 pagesDiseño de Maquina de Goldberg para Automatización en El Sector de La Construcción Con Principios Físico MecánicosANDRES CAMEROPas encore d'évaluation
- Transformación de radón: Revelando patrones ocultos en datos visualesD'EverandTransformación de radón: Revelando patrones ocultos en datos visualesPas encore d'évaluation
- Listado Vacunados Spuknik 1ra DosisDocument14 pagesListado Vacunados Spuknik 1ra DosisDavid RomeroPas encore d'évaluation
- Triptico de Comunicacion AsertivaDocument2 pagesTriptico de Comunicacion AsertivaDavid Romero100% (2)
- Datos DobladoraDocument1 pageDatos DobladoraDavid RomeroPas encore d'évaluation
- Hoja de Vida Jose Augusto-2.docx - Documentos de GoogleDocument4 pagesHoja de Vida Jose Augusto-2.docx - Documentos de GoogleDavid RomeroPas encore d'évaluation
- Lista de MaterialesDocument3 pagesLista de MaterialesDavid RomeroPas encore d'évaluation
- Balancines Fabricados en LDVDocument4 pagesBalancines Fabricados en LDVDavid RomeroPas encore d'évaluation
- Lista de Materiales Solped 2 y 5Document1 pageLista de Materiales Solped 2 y 5David RomeroPas encore d'évaluation
- Lista de MaterialesDocument14 pagesLista de MaterialesDavid RomeroPas encore d'évaluation
- MedicionesDocument2 pagesMedicionesDavid RomeroPas encore d'évaluation
- P-65001 WESCA. Icaro 2021 Ingenieria 3030Document1 pageP-65001 WESCA. Icaro 2021 Ingenieria 3030David RomeroPas encore d'évaluation
- Lista de Materiales Paneles de Perfil CDocument3 pagesLista de Materiales Paneles de Perfil CDavid RomeroPas encore d'évaluation
- Solicitud de CotizacionDocument1 pageSolicitud de CotizacionDavid RomeroPas encore d'évaluation
- Equivalencias de Vigas W10X49Document2 pagesEquivalencias de Vigas W10X49David RomeroPas encore d'évaluation
- Lista de MaterialesDocument1 pageLista de MaterialesDavid RomeroPas encore d'évaluation
- Lista de Materiales Paneles de Perfil CDocument1 pageLista de Materiales Paneles de Perfil CDavid RomeroPas encore d'évaluation
- Actividades, Materiales y Mano de Obra para Restauración de GalponDocument5 pagesActividades, Materiales y Mano de Obra para Restauración de GalponDavid RomeroPas encore d'évaluation
- Cálculo de Dimensionamiento de Los MoldesDocument28 pagesCálculo de Dimensionamiento de Los MoldesDavid RomeroPas encore d'évaluation
- ReposteriaDocument17 pagesReposteriaDavid RomeroPas encore d'évaluation
- Capitulo IVDocument26 pagesCapitulo IVDavid RomeroPas encore d'évaluation
- ReposteriaDocument17 pagesReposteriaDavid RomeroPas encore d'évaluation
- Consumibles para BombasDocument4 pagesConsumibles para BombasDavid RomeroPas encore d'évaluation
- Listado de HerramientasDocument6 pagesListado de HerramientasDavid RomeroPas encore d'évaluation
- Minuta Con Anderson CompanyDocument1 pageMinuta Con Anderson CompanyDavid RomeroPas encore d'évaluation
- Informacion de Interes para La Reparacionde CompresoresDocument8 pagesInformacion de Interes para La Reparacionde CompresoresDavid RomeroPas encore d'évaluation
- Capitulo IVDocument26 pagesCapitulo IVDavid RomeroPas encore d'évaluation
- Informe de PasantíasDocument27 pagesInforme de PasantíasDavid RomeroPas encore d'évaluation
- D 12 097 01 2 ModelDocument1 pageD 12 097 01 2 ModelDavid RomeroPas encore d'évaluation
- Informacion de Interes para La Reparacionde CompresoresDocument8 pagesInformacion de Interes para La Reparacionde CompresoresDavid RomeroPas encore d'évaluation
- Inventario ComidaDocument2 pagesInventario ComidaDavid RomeroPas encore d'évaluation
- UT06. - Motores de Corriente Contínua.Document26 pagesUT06. - Motores de Corriente Contínua.Jhezy Andron AndronPas encore d'évaluation
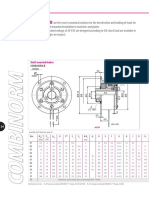
- Frenos Keb brakesCOMBINORM - B - enDocument2 pagesFrenos Keb brakesCOMBINORM - B - enJorge Adalberto Lugo QuinteroPas encore d'évaluation
- Mecánica de Sólidos DeformablesDocument8 pagesMecánica de Sólidos DeformablesEdhy Condori CatalanPas encore d'évaluation
- 7.1. PunzonadoDocument19 pages7.1. PunzonadoFrancisco ToroPas encore d'évaluation
- Ejercicios 4bim FuerzasDocument4 pagesEjercicios 4bim FuerzasEstiven RoseroPas encore d'évaluation
- Taller Refrigeracion y RadiadorDocument2 pagesTaller Refrigeracion y RadiadorLuis BaronPas encore d'évaluation
- Lab. Fis. 4 - MruDocument6 pagesLab. Fis. 4 - MruNataniel AdamesPas encore d'évaluation
- CHILLERSDocument20 pagesCHILLERSbritanny dtPas encore d'évaluation
- CNC 2Document4 pagesCNC 2KeyshlanKarinnéAybarPas encore d'évaluation
- Cat Juntas SaboDocument59 pagesCat Juntas SaboAmelia Silvia LedesmaPas encore d'évaluation
- Diferencia Entre Circuito Cerrado y Abierto en HidraulicaDocument3 pagesDiferencia Entre Circuito Cerrado y Abierto en Hidraulicasteven quijadaPas encore d'évaluation
- 05 Costos Unitarios Red de Agua PotableDocument16 pages05 Costos Unitarios Red de Agua PotableMichaelVlPas encore d'évaluation
- Problemas1,6 Equipo1 PS3.Document36 pagesProblemas1,6 Equipo1 PS3.Karel GerardoPas encore d'évaluation
- RefriDocument4 pagesRefriRicardo SilvaPas encore d'évaluation
- Introducción Al Código ASMEDocument41 pagesIntroducción Al Código ASMESicea Ingenieria100% (5)
- Mantenimiento: ContenidosDocument34 pagesMantenimiento: ContenidosSr. PolestarPas encore d'évaluation
- RESORTESDocument28 pagesRESORTESTeio EstPas encore d'évaluation
- Informe de Momento de Inercia - GRUPO1Document18 pagesInforme de Momento de Inercia - GRUPO1Juan Vilchez PuiconPas encore d'évaluation
- Series: MX3200 Series MX5200 SeriesDocument76 pagesSeries: MX3200 Series MX5200 SeriesViridiana Espejel ReyesPas encore d'évaluation
- Unidad I - Cinema TicaDocument14 pagesUnidad I - Cinema TicaJavier OrdoñezPas encore d'évaluation
- Inyección Electrónica de CombustibleDocument8 pagesInyección Electrónica de Combustiblemonica naranjo100% (1)