Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Handbook User Guide Peugeot 207Document250 pagesHandbook User Guide Peugeot 207Milos100% (1)
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- 2012 Nacto Urban Street Design GuideDocument37 pages2012 Nacto Urban Street Design Guidearkirovic1994100% (2)
- Exo ShelterDocument17 pagesExo ShelterIoana AncutaPas encore d'évaluation
- Architecture Site Analysis GuideDocument24 pagesArchitecture Site Analysis Guidejaison remigio50% (2)
- Healthy DietDocument8 pagesHealthy DietsibiePas encore d'évaluation
- Mortgage Financing Application Form - Jan2021Document11 pagesMortgage Financing Application Form - Jan2021sibiePas encore d'évaluation
- VIVA-What Happens PDFDocument55 pagesVIVA-What Happens PDFshazliPas encore d'évaluation
- Experimental Method For Plotting S-N Curve With ADocument10 pagesExperimental Method For Plotting S-N Curve With AsibiePas encore d'évaluation
- 121file PDFDocument49 pages121file PDFsibiePas encore d'évaluation
- Application For Credit: Declaration by CustomerDocument1 pageApplication For Credit: Declaration by CustomersibiePas encore d'évaluation
- WAHT-PI-0891 Low Phosphate Diet V2Document20 pagesWAHT-PI-0891 Low Phosphate Diet V2sibiePas encore d'évaluation
- TF 2 PDFDocument3 pagesTF 2 PDFsibiePas encore d'évaluation
- NAFEMS Academic Module Approval: Introduction To The Approval SchemeDocument5 pagesNAFEMS Academic Module Approval: Introduction To The Approval SchemesibiePas encore d'évaluation
- Brifing New Students Sept 2017 PDFDocument82 pagesBrifing New Students Sept 2017 PDFsibiePas encore d'évaluation
- NAFEMS Academic Module Approval: Introduction To The Approval SchemeDocument5 pagesNAFEMS Academic Module Approval: Introduction To The Approval SchemesibiePas encore d'évaluation
- Brifing New Students Sept 2017 PDFDocument82 pagesBrifing New Students Sept 2017 PDFsibiePas encore d'évaluation
- Design and Development of Seat (Soldier) Against Mine Blast ImpactDocument5 pagesDesign and Development of Seat (Soldier) Against Mine Blast ImpactsibiePas encore d'évaluation
- Literature Review Template: Writing CentreDocument1 pageLiterature Review Template: Writing CentreSyed Imam BakharPas encore d'évaluation
- ASEE 2012 Watson Draft 2 PDFDocument22 pagesASEE 2012 Watson Draft 2 PDFdrpPas encore d'évaluation
- UEM Sol To Exerc Chap 097Document11 pagesUEM Sol To Exerc Chap 097sibiePas encore d'évaluation
- Press Release in Response To MOH (English)Document1 pagePress Release in Response To MOH (English)sibiePas encore d'évaluation
- Review On Anthropometric Test Dummy and Computational ModellingDocument1 pageReview On Anthropometric Test Dummy and Computational ModellingsibiePas encore d'évaluation
- PaperDocument9 pagesPapersibiePas encore d'évaluation
- Taklimat 4 - TalentcorpDocument23 pagesTaklimat 4 - TalentcorpsibiePas encore d'évaluation
- 0701 Ergonomics Among GuitaristsDocument1 page0701 Ergonomics Among GuitaristssibiePas encore d'évaluation
- Press Release in Response To MOH (English)Document1 pagePress Release in Response To MOH (English)sibiePas encore d'évaluation
- UEM Sol To Exerc Chap 097Document11 pagesUEM Sol To Exerc Chap 097sibiePas encore d'évaluation
- 2019 Event Planning KitDocument45 pages2019 Event Planning KitPrasoon GuptaPas encore d'évaluation
- Objective Rating of Signals Using Test and Simulation ResponsesDocument8 pagesObjective Rating of Signals Using Test and Simulation ResponsessibiePas encore d'évaluation
- Usm Postgraduate HandbookDocument26 pagesUsm Postgraduate HandbooksibiePas encore d'évaluation
- Computational Modelling of Transient Blast Wave EffectsDocument7 pagesComputational Modelling of Transient Blast Wave EffectssibiePas encore d'évaluation
- Hybrid Sounding RocketDocument1 pageHybrid Sounding RocketsibiePas encore d'évaluation
- Skema Paper Bi PDFDocument10 pagesSkema Paper Bi PDFsibiePas encore d'évaluation
- Minerva SSBDocument3 pagesMinerva SSBkrishna487Pas encore d'évaluation
- Measuring DragDocument50 pagesMeasuring DragAbdlHameed FareedahPas encore d'évaluation
- Chapter5 Drainage of Highway PavementDocument26 pagesChapter5 Drainage of Highway Pavementmehul_cl045032Pas encore d'évaluation
- Nyspsp AddendumDocument64 pagesNyspsp Addendumadfsh-1Pas encore d'évaluation
- Road Safety Barriers: Syed Salman Kashif Ahsaan Presented byDocument15 pagesRoad Safety Barriers: Syed Salman Kashif Ahsaan Presented bySyed Żaýn AhmedPas encore d'évaluation
- H3155Document1 pageH3155Exile PeachPas encore d'évaluation
- Motor Policy Wording UaeDocument64 pagesMotor Policy Wording UaeBassam MustafaPas encore d'évaluation
- The Local News, March 01, 2014Document32 pagesThe Local News, March 01, 2014Dave GarofaloPas encore d'évaluation
- Section 28 - Aggregate Base Course (Faa P-208) 28-1 GeneralDocument10 pagesSection 28 - Aggregate Base Course (Faa P-208) 28-1 GeneralSalahuddin MPas encore d'évaluation
- Jta S. Cruz LP B. InjDocument7 pagesJta S. Cruz LP B. InjRoberto Azevedo da SilvaPas encore d'évaluation
- PennDOT EmailsDocument328 pagesPennDOT EmailsmegankshannonPas encore d'évaluation
- LAURA K. LEONE: Revere Chamber of Commerce NWSLTR Feb 10Document4 pagesLAURA K. LEONE: Revere Chamber of Commerce NWSLTR Feb 10Laurie Wilfong LeonePas encore d'évaluation
- Notice: Alternatives Analysis/Environmental Impact Statement For High-Capacity Transit Improvements in The Tempe South CorridorDocument3 pagesNotice: Alternatives Analysis/Environmental Impact Statement For High-Capacity Transit Improvements in The Tempe South CorridorJustia.comPas encore d'évaluation
- Buying Alcohol in Oman - (MM) Muscat MutteringsDocument7 pagesBuying Alcohol in Oman - (MM) Muscat Mutteringsjyothis_joy8315Pas encore d'évaluation
- CAD ReportDocument7 pagesCAD ReportSiddharth PatelPas encore d'évaluation
- MB 4054 S TRACKTOR 6x4 (Full Spec.)Document18 pagesMB 4054 S TRACKTOR 6x4 (Full Spec.)Mar Dha ZudyanPas encore d'évaluation
- Runner's WarriorDocument92 pagesRunner's WarriorMarco PagariganPas encore d'évaluation
- X05BLH 042PDocument1 pageX05BLH 042PBarossaHeraldPas encore d'évaluation
- Culvert InventoryDocument6 pagesCulvert InventorySAAKSH DEGITECHPas encore d'évaluation
- PPPDocument16 pagesPPPAkanksha WaliaPas encore d'évaluation
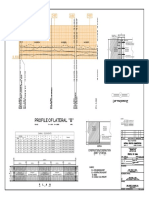
- Dingras Ris Lat. B Final-Layout1Document1 pageDingras Ris Lat. B Final-Layout1NIA INIMOPas encore d'évaluation
- Drawings of Bridges/ Structures For Ns Profile: Appendix - 3Document63 pagesDrawings of Bridges/ Structures For Ns Profile: Appendix - 3Likhon BiswasPas encore d'évaluation
- PIARC Road Safety Manual - Blair TurnerDocument10 pagesPIARC Road Safety Manual - Blair Turner3pivopijePas encore d'évaluation
- Solution Manual TE VOL-IDocument52 pagesSolution Manual TE VOL-IRajesh KhadkaPas encore d'évaluation
- Apta SignsDocument48 pagesApta SignswepremaPas encore d'évaluation
- 96 - Summary of Items Discussed in 5-21 APSEC Discussion Forum On 12.11Document20 pages96 - Summary of Items Discussed in 5-21 APSEC Discussion Forum On 12.11trickyggPas encore d'évaluation