Vous aimerez peut-être aussi
- TanninsDocument34 pagesTanninsClare CariñoPas encore d'évaluation
- Loish Workshop - StepsDocument76 pagesLoish Workshop - StepsAna100% (2)
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesD'EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesÉvaluation : 1.5 sur 5 étoiles1.5/5 (2)
- Maya First Time Tutorial Maya 2020Document42 pagesMaya First Time Tutorial Maya 2020Muhammad Jafar DarwisPas encore d'évaluation
- Adobe Photoshop 7Document10 pagesAdobe Photoshop 7Sublesh SagarPas encore d'évaluation
- Chapter - 6Document8 pagesChapter - 6Min Thade DeePas encore d'évaluation
- LED Irradiance Pattern at Short Distances: Ivan MorenoDocument6 pagesLED Irradiance Pattern at Short Distances: Ivan MorenoIvan MorenoPas encore d'évaluation
- Nonlinear Transient Analysis of Doubly CurvedDocument13 pagesNonlinear Transient Analysis of Doubly CurvedVenkata Swamy Naidu NeigapulaPas encore d'évaluation
- MA261 2020 PaperDocument3 pagesMA261 2020 PaperMac PearcePas encore d'évaluation
- Exact Finite Differences The Derivative On Non-Uniformly Spaced Partitions - Armando Martínez-Pérez - 25 July 2017Document11 pagesExact Finite Differences The Derivative On Non-Uniformly Spaced Partitions - Armando Martínez-Pérez - 25 July 2017RMolina65Pas encore d'évaluation
- QMC Lecture #12 - Quasi Monte Carlo IntegrationDocument20 pagesQMC Lecture #12 - Quasi Monte Carlo IntegrationankiosaPas encore d'évaluation
- Photon Beetle Spec Round2Document14 pagesPhoton Beetle Spec Round2Pradeep KoriPas encore d'évaluation
- D Linear Regression With RDocument9 pagesD Linear Regression With RBùi Nguyên HoàngPas encore d'évaluation
- Math TurkDocument7 pagesMath TurkMəhəmməd BayramovPas encore d'évaluation
- Radonov's State-Space Model FilterDocument1 pageRadonov's State-Space Model FilterErikaPas encore d'évaluation
- Chapter 4 - Polynomial Functions: Solutions To Exercise 4ADocument47 pagesChapter 4 - Polynomial Functions: Solutions To Exercise 4AAnonymous 69Pas encore d'évaluation
- MATRIX TITLEDocument11 pagesMATRIX TITLEVidushi VinodPas encore d'évaluation
- Mect4470 TH1Document4 pagesMect4470 TH1Ercan DenizPas encore d'évaluation
- Inverse Kinematics ExplainedDocument51 pagesInverse Kinematics ExplainedNahom AlemnewPas encore d'évaluation
- Tugas MTKDocument24 pagesTugas MTKGhalih Hakiki KavisaPas encore d'évaluation
- Midterm ESE 500Document8 pagesMidterm ESE 500kaysriPas encore d'évaluation
- Closed Forms For Numerical LoopsDocument29 pagesClosed Forms For Numerical LoopsTaolue ChenPas encore d'évaluation
- Numerical Methods Presentation Final editionDocument11 pagesNumerical Methods Presentation Final editionLEGENDARY uploaderPas encore d'évaluation
- Project_3Document3 pagesProject_3igerhard23Pas encore d'évaluation
- Fractional-Order Legendre Operational Matrix of Fractional Integration For Solving The Riccati Equation With FDocument11 pagesFractional-Order Legendre Operational Matrix of Fractional Integration For Solving The Riccati Equation With FMohamed FathyPas encore d'évaluation
- 2.classical Mechanics - GATE PDFDocument18 pages2.classical Mechanics - GATE PDFneha patelPas encore d'évaluation
- Relativistic QMDocument21 pagesRelativistic QMI m mortal Beast ytPas encore d'évaluation
- Homework 2Document3 pagesHomework 2amanidjeghloud04Pas encore d'évaluation
- Nonlocal coupled system for ψ-Hilfer fractional order Langevin equationsDocument26 pagesNonlocal coupled system for ψ-Hilfer fractional order Langevin equationsBoutiara AbdellatifPas encore d'évaluation
- 0802 0691 PDFDocument21 pages0802 0691 PDFGalina AlexeevaPas encore d'évaluation
- Ict 4052 Nnfl-Mkp-Part BDocument2 pagesIct 4052 Nnfl-Mkp-Part BShanPas encore d'évaluation
- Assignment 02Document2 pagesAssignment 02Muntaha Rahman MayazPas encore d'évaluation
- Lecture 12Document24 pagesLecture 12ankiosaPas encore d'évaluation
- Homework Solutions for McIntyre Ch 7 & 11 (Ch 7, 11Document3 pagesHomework Solutions for McIntyre Ch 7 & 11 (Ch 7, 11Maaz KhanPas encore d'évaluation
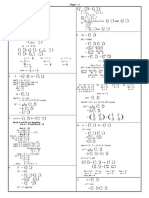
- ECON 5350 Class Notes Nonlinear Regression Models: 2.1 Linearized Regression Model and The Gauss-Newton AlgorithmDocument11 pagesECON 5350 Class Notes Nonlinear Regression Models: 2.1 Linearized Regression Model and The Gauss-Newton AlgorithmRaul SolesPas encore d'évaluation
- BioMEMS Sheet2 ADocument7 pagesBioMEMS Sheet2 Atracywst0123Pas encore d'évaluation
- Transelliptical Component Analysis: Johns Hopkins University Princeton UniversityDocument26 pagesTranselliptical Component Analysis: Johns Hopkins University Princeton UniversitybobmezzPas encore d'évaluation
- Local Discontinuous Galerkin Method For The Fractional Diffusion Equation With Integral Fractional LaplacianDocument11 pagesLocal Discontinuous Galerkin Method For The Fractional Diffusion Equation With Integral Fractional LaplacianMax ColePas encore d'évaluation
- 2 D Transformation: Computer GraphicDocument43 pages2 D Transformation: Computer Graphicarup sarkerPas encore d'évaluation
- Final Report On A Course of Numerical Methods For Differential EquationsDocument3 pagesFinal Report On A Course of Numerical Methods For Differential EquationsLuiz VottoPas encore d'évaluation
- Basic and Applied Mathematics Chapter 3: Solving a Linear Programming ProblemDocument9 pagesBasic and Applied Mathematics Chapter 3: Solving a Linear Programming Problemkefyalew TPas encore d'évaluation
- 10.1 Practice Problems-Solutions: y X y X y XDocument2 pages10.1 Practice Problems-Solutions: y X y X y XMorvaridYiPas encore d'évaluation
- L3 MLRMDocument10 pagesL3 MLRM洪梓沛Pas encore d'évaluation
- S Tutorial 04Document2 pagesS Tutorial 04Raghav JainPas encore d'évaluation
- Assn2 PDFDocument3 pagesAssn2 PDFDaniel GuevaraPas encore d'évaluation
- Joshi Report 1Document12 pagesJoshi Report 1Ankit JoshiPas encore d'évaluation
- An Introduction To Robust Estimation With R Functi RemovedDocument12 pagesAn Introduction To Robust Estimation With R Functi RemovedMuhammad ZulfadhliPas encore d'évaluation
- Numerical Mathematics II For Engineers: Homework 01Document3 pagesNumerical Mathematics II For Engineers: Homework 01Benjamin BnPas encore d'évaluation
- EconometricsII ExercisesDocument27 pagesEconometricsII ExercisesAkriti TrivediPas encore d'évaluation
- Relativistic Kinematics: Raghunath Sahoo Indian Institute of Technology Indore, India-452020Document41 pagesRelativistic Kinematics: Raghunath Sahoo Indian Institute of Technology Indore, India-452020aleacunia87Pas encore d'évaluation
- HW6Document8 pagesHW6Duna areny molnePas encore d'évaluation
- MAST10018 ExercisesDocument67 pagesMAST10018 ExercisesEric HePas encore d'évaluation
- Area Under Curves - JEE Main 2023 April Chapterwise PYQ - MathonGoDocument8 pagesArea Under Curves - JEE Main 2023 April Chapterwise PYQ - MathonGoShantanu BhosalePas encore d'évaluation
- Assignment 1 SolutionDocument11 pagesAssignment 1 SolutionaaPas encore d'évaluation
- Review Problems Session 1-2-3-4 PDFDocument3 pagesReview Problems Session 1-2-3-4 PDFsovvalPas encore d'évaluation
- More On Neutrosophic Lie SubalgebraDocument13 pagesMore On Neutrosophic Lie SubalgebraScience DirectPas encore d'évaluation
- Solving Systems of Variational Inequalities Using New AlgorithmsDocument8 pagesSolving Systems of Variational Inequalities Using New AlgorithmsRafia LatifPas encore d'évaluation
- Understanding Numerical OscillationsDocument44 pagesUnderstanding Numerical OscillationsRitvik DobriyalPas encore d'évaluation
- 06 - Chapter 02Document31 pages06 - Chapter 02Narendar SaggamPas encore d'évaluation
- University of Zimbabwe: Time: 2 HoursDocument3 pagesUniversity of Zimbabwe: Time: 2 HoursTapiwa AmisiPas encore d'évaluation
- Man 2017 On Partial Fraction Decompositions by Repeated Polynomial DivisionsDocument8 pagesMan 2017 On Partial Fraction Decompositions by Repeated Polynomial DivisionsCarlos AndradePas encore d'évaluation
- Ebook Digital Information Age An Introduction To Electrical Engineering 2Nd Edition Roman Kuc Solutions Manual Full Chapter PDFDocument35 pagesEbook Digital Information Age An Introduction To Electrical Engineering 2Nd Edition Roman Kuc Solutions Manual Full Chapter PDFconnielopezpmdrzqcjbn100% (7)
- Dip QuestionsDocument3 pagesDip QuestionsVinayPas encore d'évaluation
- EE ESE Mains Paper-1 2018 PDFDocument76 pagesEE ESE Mains Paper-1 2018 PDFchitransh90100% (1)
- Nonverbal CommunicationDocument1 pageNonverbal CommunicationMaiah DinglasanPas encore d'évaluation
- FDI Inflows Hit Record $10B in 2017Document2 pagesFDI Inflows Hit Record $10B in 2017Maiah DinglasanPas encore d'évaluation
- Exercise 3 My Research BibliographyDocument5 pagesExercise 3 My Research BibliographyMaiah DinglasanPas encore d'évaluation
- Aluminum Hydroxide Magnesium Hydroxide: Batch No.: 3B05 Lot No.: 3B05S3Document1 pageAluminum Hydroxide Magnesium Hydroxide: Batch No.: 3B05 Lot No.: 3B05S3Maiah DinglasanPas encore d'évaluation
- Non-Traditional Media Frequency ChartDocument2 pagesNon-Traditional Media Frequency ChartMaiah DinglasanPas encore d'évaluation
- Final ParacetamolDocument1 pageFinal ParacetamolMaiah DinglasanPas encore d'évaluation
- Exercise 3 My Research BibliographyDocument5 pagesExercise 3 My Research BibliographyMaiah DinglasanPas encore d'évaluation
- Convergent Inversion Approximations For Polynomials in Bernstein FormDocument18 pagesConvergent Inversion Approximations For Polynomials in Bernstein FormMaiah DinglasanPas encore d'évaluation
- Society For Industrial and Applied Mathematics SIAM Journal On Numerical AnalysisDocument6 pagesSociety For Industrial and Applied Mathematics SIAM Journal On Numerical AnalysisMaiah DinglasanPas encore d'évaluation
- Budget PlanningDocument3 pagesBudget PlanningMaiah DinglasanPas encore d'évaluation
- Zalunexir Incomplete 2Document1 pageZalunexir Incomplete 2Maiah DinglasanPas encore d'évaluation
- ErtertDocument12 pagesErtertMaiah DinglasanPas encore d'évaluation
- Final Logo SuperDocument1 pageFinal Logo SuperMaiah DinglasanPas encore d'évaluation
- Plant TissuesDocument3 pagesPlant TissuesMia MistypuffPas encore d'évaluation
- Glycosides LecDocument6 pagesGlycosides LecMaiah DinglasanPas encore d'évaluation
- Biochem HWDocument9 pagesBiochem HWMaiah DinglasanPas encore d'évaluation
- GlycosidesDocument4 pagesGlycosidesMaiah DinglasanPas encore d'évaluation
- Rent Condo Unit ContractDocument2 pagesRent Condo Unit ContractMaiah DinglasanPas encore d'évaluation
- Box XDocument1 pageBox XMaiah DinglasanPas encore d'évaluation
- Leach Pycnometer: Experiment 1: Specific GravityDocument11 pagesLeach Pycnometer: Experiment 1: Specific GravityMaiah DinglasanPas encore d'évaluation
- 03 January 2017 Maiah Beatrice R. Dinglasan University of Santo Tomas - Manila 0917 550 0003Document3 pages03 January 2017 Maiah Beatrice R. Dinglasan University of Santo Tomas - Manila 0917 550 0003Maiah DinglasanPas encore d'évaluation
- Chapter 9-SensesDocument74 pagesChapter 9-SensesMaiah DinglasanPas encore d'évaluation
- Comp 103 Lab Lab A Organic Chemistry LAB Lab 6Document1 pageComp 103 Lab Lab A Organic Chemistry LAB Lab 6Maiah DinglasanPas encore d'évaluation
- Confidence Interval PDFDocument24 pagesConfidence Interval PDFMaiah DinglasanPas encore d'évaluation
- GUI OS features and Windows versionsDocument1 pageGUI OS features and Windows versionsBernadette BoholanoPas encore d'évaluation
- Comp 103 Lab Lab A Organic Chemistry LAB Lab 6Document1 pageComp 103 Lab Lab A Organic Chemistry LAB Lab 6Maiah DinglasanPas encore d'évaluation
- Exercise 8 Simple Muscle ContractionDocument2 pagesExercise 8 Simple Muscle ContractionMaiah DinglasanPas encore d'évaluation
- Antibiotics: Brand Name Generic NameDocument1 pageAntibiotics: Brand Name Generic NameMaiah DinglasanPas encore d'évaluation
- Creating image filters in HLSL for VC# projectsDocument13 pagesCreating image filters in HLSL for VC# projectsMarkPas encore d'évaluation
- Rasterization: 1107190 - Introdução À Computação Gráfica Prof. Christian Azambuja Pagot Ci / UfpbDocument30 pagesRasterization: 1107190 - Introdução À Computação Gráfica Prof. Christian Azambuja Pagot Ci / UfpbJhonathan LaurindoPas encore d'évaluation
- Digital Image Processing: Model Question Paper-1 With Effect From 2019-20 (CBCS Scheme)Document3 pagesDigital Image Processing: Model Question Paper-1 With Effect From 2019-20 (CBCS Scheme)bmbzogfxhbufiwsltuPas encore d'évaluation
- Siril Procedure For Astro PhotographyDocument3 pagesSiril Procedure For Astro PhotographyRobertPas encore d'évaluation
- Klasifikasi Tingkat Kematangan Buah Markisa Menggunakan Jaringan Syaraf Tiruan Berbasis Pengolahan CitraDocument8 pagesKlasifikasi Tingkat Kematangan Buah Markisa Menggunakan Jaringan Syaraf Tiruan Berbasis Pengolahan CitraIshak Ibnu burhanPas encore d'évaluation
- Computer Graphics - Visible Surface DetectionDocument15 pagesComputer Graphics - Visible Surface DetectionSyedkareem_hkgPas encore d'évaluation
- Mic MicrophoneDocument7 pagesMic MicrophonehabnamPas encore d'évaluation
- Metal Feature Set TablesDocument15 pagesMetal Feature Set TablesaPas encore d'évaluation
- LogDocument16 pagesLogPauPas encore d'évaluation
- Color RGBDocument5 pagesColor RGBanbuchelvanPas encore d'évaluation
- CS101x S013 Digital Images and Histograms IIT BombayDocument25 pagesCS101x S013 Digital Images and Histograms IIT BombayLêNhậtMinhPas encore d'évaluation
- Comparison Descartes ContextCaptureEditorDocument1 pageComparison Descartes ContextCaptureEditoroscarcmPas encore d'évaluation
- Blue Flame: Width: 150 Pixels Height: 150 Pixels RGB: 0, 68, 119Document3 pagesBlue Flame: Width: 150 Pixels Height: 150 Pixels RGB: 0, 68, 119Dovinca MadalinPas encore d'évaluation
- Cursos Photoshop - Iniciantes-: Pop ArtDocument16 pagesCursos Photoshop - Iniciantes-: Pop ArtCatarina Branco R. CarvalhoPas encore d'évaluation
- Image Processing ProjectDocument12 pagesImage Processing ProjectKartik KumarPas encore d'évaluation
- ME306 SyllabusDocument20 pagesME306 SyllabuskhalidmhPas encore d'évaluation
- QusetionsDocument6 pagesQusetionsمحمد الاشولPas encore d'évaluation
- PCTOCDocument35 pagesPCTOCPeñamante CarlosPas encore d'évaluation
- Image Enhancement-Spatial Filtering From: Digital Image Processing, Chapter 3Document56 pagesImage Enhancement-Spatial Filtering From: Digital Image Processing, Chapter 3gowtham1990Pas encore d'évaluation
- Grade 9, Color TheoryDocument35 pagesGrade 9, Color TheoryLily Riddle MalfoyPas encore d'évaluation
- Colony Counter 1Document9 pagesColony Counter 1nikitadanniswPas encore d'évaluation
- TexmapDocument8 pagesTexmaptovih27684Pas encore d'évaluation
- Sharp LC-60LE745U CNET Review Calibration ResultsDocument7 pagesSharp LC-60LE745U CNET Review Calibration ResultsDavid KatzmaierPas encore d'évaluation
- Computer Graphics ProgramDocument28 pagesComputer Graphics ProgramMadhukar SinghPas encore d'évaluation
- Image Processing - AL Computer ScienceDocument6 pagesImage Processing - AL Computer ScienceSarah HussainPas encore d'évaluation
- RISpec3 2Document226 pagesRISpec3 2minglawPas encore d'évaluation