Vous aimerez peut-être aussi
- Building Formal Requirements Models For Reliable Software: Avl@info - Ucl.ac - BeDocument21 pagesBuilding Formal Requirements Models For Reliable Software: Avl@info - Ucl.ac - BeMahwish KhanPas encore d'évaluation
- Software Quality Assessment of Open Source SoftwareDocument13 pagesSoftware Quality Assessment of Open Source SoftwareZafr O'ConnellPas encore d'évaluation
- Certification of COTS Software in NASA Human Rated Flight SystemsDocument14 pagesCertification of COTS Software in NASA Human Rated Flight SystemsSubrahmanya RaoPas encore d'évaluation
- 1865-Article Text - Manuscript-6881-1-10-20120328Document8 pages1865-Article Text - Manuscript-6881-1-10-20120328rajrdy4Pas encore d'évaluation
- A Case Study On The Applicability of Software Reliability Models To A Telecommunication SoftwareDocument6 pagesA Case Study On The Applicability of Software Reliability Models To A Telecommunication Software2K19/SE/022 ASHUTOSH THAKURPas encore d'évaluation
- 6615 Ijcses 01Document18 pages6615 Ijcses 01ijcsesPas encore d'évaluation
- Research Article: Lessons Learnt From Gauging Software Metrics of Cabin Software in A Commercial AirlinerDocument12 pagesResearch Article: Lessons Learnt From Gauging Software Metrics of Cabin Software in A Commercial AirlinerEman AlkurdiPas encore d'évaluation
- Performance Testing: Methodologies and ToolsDocument9 pagesPerformance Testing: Methodologies and ToolsThanuja PereraPas encore d'évaluation
- An Experiment in Design and Analysis of Real-Time ApplicationsDocument15 pagesAn Experiment in Design and Analysis of Real-Time ApplicationsRoberto Romero TerceroPas encore d'évaluation
- Writing Effective Requirements SpecificationsDocument20 pagesWriting Effective Requirements SpecificationsMarcos GonzalezPas encore d'évaluation
- Real-Time Implementation of Low-Cost University Satellite 3-Axis Attitude Determination and Control SystemDocument10 pagesReal-Time Implementation of Low-Cost University Satellite 3-Axis Attitude Determination and Control SystemivosyPas encore d'évaluation
- A Survey On Load Testing of Large-Scale Software SystemsDocument29 pagesA Survey On Load Testing of Large-Scale Software SystemsTruc LePas encore d'évaluation
- Intelligent Assessment and Prediction of Software Characteristics at The Design StageDocument7 pagesIntelligent Assessment and Prediction of Software Characteristics at The Design StageіукероPas encore d'évaluation
- Base Paper 4Document6 pagesBase Paper 4SanjayPas encore d'évaluation
- Making Embedded Software Reuse Practical and Safe: Nancy G. Leveson, Kathryn Anne WeissDocument8 pagesMaking Embedded Software Reuse Practical and Safe: Nancy G. Leveson, Kathryn Anne WeissPadma IyengharPas encore d'évaluation
- Study of Predicting Fault Prone Software ModulesDocument3 pagesStudy of Predicting Fault Prone Software Moduleseditor_ijarcssePas encore d'évaluation
- Quality Assurance Automation SystemsDocument20 pagesQuality Assurance Automation SystemsManuel ParraPas encore d'évaluation
- Dynamic Design and Evaluation of Software Architecture in Critical Systems DevelopmentDocument10 pagesDynamic Design and Evaluation of Software Architecture in Critical Systems DevelopmentepynicPas encore d'évaluation
- 20bce2689 VL2022230103832 Ast04Document7 pages20bce2689 VL2022230103832 Ast04Rajvansh SinghPas encore d'évaluation
- Design-Driven Development of Dependable Applications: A Case Study in AvionicsDocument11 pagesDesign-Driven Development of Dependable Applications: A Case Study in AvionicsRaja SekarPas encore d'évaluation
- Towards A Quality Model For Rescuer Platform Evaluation Using A SoS ApproachingDocument3 pagesTowards A Quality Model For Rescuer Platform Evaluation Using A SoS ApproachingJaguaraci SilvaPas encore d'évaluation
- Software Testing For Web-Applications Non-Functional RequirementsDocument5 pagesSoftware Testing For Web-Applications Non-Functional RequirementsShay GinsbourgPas encore d'évaluation
- ZivchaosDocument20 pagesZivchaos098 DINIAH NURROHMAH 21Pas encore d'évaluation
- Quality FactorsDocument21 pagesQuality FactorsrahmounyPas encore d'évaluation
- Writing Effective Requirements For Technical SpecificationDocument14 pagesWriting Effective Requirements For Technical SpecificationSrinathPas encore d'évaluation
- Property Patterns For The Formal Verification of Automated Production Systems ?Document6 pagesProperty Patterns For The Formal Verification of Automated Production Systems ?rcfrcf279Pas encore d'évaluation
- Findability Through Traceability - A Realistic Application of Candidate Trace Links?Document10 pagesFindability Through Traceability - A Realistic Application of Candidate Trace Links?Markus BorgPas encore d'évaluation
- Unit 2 Software Reliability (SR) PDFDocument79 pagesUnit 2 Software Reliability (SR) PDFKartik Gupta 71Pas encore d'évaluation
- Software Challenges in Achieving Space SafetyDocument15 pagesSoftware Challenges in Achieving Space SafetyAnonymous mE6MEje0Pas encore d'évaluation
- Software Metrics For Fault Prediction Using Machine Learning ApproachesDocument5 pagesSoftware Metrics For Fault Prediction Using Machine Learning ApproachesJerryMathewPas encore d'évaluation
- Improving The Effectiveness of FMEA Analysis in Automotive - A Case StudyDocument14 pagesImproving The Effectiveness of FMEA Analysis in Automotive - A Case StudyIvanPas encore d'évaluation
- Sistem ÖdevDocument3 pagesSistem Ödevesra.kucukbas57Pas encore d'évaluation
- Developing Software Architecture Comparison Analysis Method For Critical Socio-Technical SystemsDocument10 pagesDeveloping Software Architecture Comparison Analysis Method For Critical Socio-Technical SystemsShady GomaaPas encore d'évaluation
- Design, Testing, and Evaluation Techniques For Software Reliability EngineeringDocument8 pagesDesign, Testing, and Evaluation Techniques For Software Reliability Engineeringjackngare99Pas encore d'évaluation
- ZH 33251263Document13 pagesZH 33251263AJER JOURNALPas encore d'évaluation
- Case Study Applying Expert Systems Technology To Testing Phase of Software Life CycleDocument5 pagesCase Study Applying Expert Systems Technology To Testing Phase of Software Life CycleNisha JhaPas encore d'évaluation
- Se 2012Document94 pagesSe 2012Asad AbbasiPas encore d'évaluation
- Case Study Do-254Document9 pagesCase Study Do-254Sezgin BayrakPas encore d'évaluation
- Redd Ivar I 2019Document8 pagesRedd Ivar I 2019KIKIPas encore d'évaluation
- February 2011 Master of Computer Application (MCA) - Semester 3 MC0071 - Software Engineering - 4 Credits (Book ID: B0808 & B0809) Assignment Set - 1 (60 Marks)Document14 pagesFebruary 2011 Master of Computer Application (MCA) - Semester 3 MC0071 - Software Engineering - 4 Credits (Book ID: B0808 & B0809) Assignment Set - 1 (60 Marks)Aeron FrancoPas encore d'évaluation
- What Is Software Architecture?: Describe Softwarearchitecture in Your Own Words. (5) Software ArchitectureDocument6 pagesWhat Is Software Architecture?: Describe Softwarearchitecture in Your Own Words. (5) Software ArchitectureShruthi JalalpuramPas encore d'évaluation
- A UML Model-Based Approach For Replication Assessment of AUTOSAR Safety-Critical ApplicationsDocument12 pagesA UML Model-Based Approach For Replication Assessment of AUTOSAR Safety-Critical ApplicationsczgPas encore d'évaluation
- Things To Comply For The Prototype Presentation (Deliberation)Document2 pagesThings To Comply For The Prototype Presentation (Deliberation)Sherwin GipitPas encore d'évaluation
- Software Engineering (PR) : Rishita Jaggi 1140213 B.Tech. Third Year IT-3Document34 pagesSoftware Engineering (PR) : Rishita Jaggi 1140213 B.Tech. Third Year IT-3Sanket Duhoon100% (2)
- Reliability Evaluation OfWeb-Based Software ApplicationsDocument7 pagesReliability Evaluation OfWeb-Based Software ApplicationsPrakhar AsthanaPas encore d'évaluation
- Software Project Cost Estimation: Issues, Problems and Possible SolutionsDocument6 pagesSoftware Project Cost Estimation: Issues, Problems and Possible SolutionsAnita GutierrezPas encore d'évaluation
- Limitations, Applicability: Software Models: andDocument13 pagesLimitations, Applicability: Software Models: andSimmiPas encore d'évaluation
- Complex Software Testing Analysis Using International StandardsDocument6 pagesComplex Software Testing Analysis Using International Standardshansi123nipunika123Pas encore d'évaluation
- Bus ReservationDocument65 pagesBus ReservationMohd HaiderPas encore d'évaluation
- A Survey On Load Testing of Large-Scale Software SystemsDocument29 pagesA Survey On Load Testing of Large-Scale Software SystemsNguyễn Khánh DuyPas encore d'évaluation
- A Embedded Software Testing Process ModelDocument5 pagesA Embedded Software Testing Process ModelNV Raman PrasadPas encore d'évaluation
- Certifiable Software Applications 1: Main ProcessesD'EverandCertifiable Software Applications 1: Main ProcessesPas encore d'évaluation
- A Framework For Evaluating The Standards For The PDocument21 pagesA Framework For Evaluating The Standards For The PAngelo Maria SepePas encore d'évaluation
- What Can We Expect IEEEDocument10 pagesWhat Can We Expect IEEEValentine Tom KingselyPas encore d'évaluation
- Investigating The Impact of Usability On Software Architecture Through ScenariosDocument12 pagesInvestigating The Impact of Usability On Software Architecture Through ScenariosHeriberto AguirrePas encore d'évaluation
- Test Tu Cuoi KyDocument4 pagesTest Tu Cuoi KyHoàng VươngPas encore d'évaluation
- A Framework For The Engineering of Reliable Distributed SystemsDocument8 pagesA Framework For The Engineering of Reliable Distributed Systemssurendiran123Pas encore d'évaluation
- Introduction To Software Engineering.Document31 pagesIntroduction To Software Engineering.AmardeepSinghPas encore d'évaluation
- Defect Prediction Model For AOP-based Software Development Using Hybrid Fuzzy C-Means With Genetic Algorithm and K-Nearest Neighbors ClassifierDocument5 pagesDefect Prediction Model For AOP-based Software Development Using Hybrid Fuzzy C-Means With Genetic Algorithm and K-Nearest Neighbors ClassifierPRABHAKARANPas encore d'évaluation
- Complexity : Robert Endre A byDocument13 pagesComplexity : Robert Endre A bynicolasPas encore d'évaluation
- 30 MHZ Function - Arbitrary Waveform GeneratorsDocument12 pages30 MHZ Function - Arbitrary Waveform GeneratorsnicolasPas encore d'évaluation
- Number 2 JUNE 1985Document6 pagesNumber 2 JUNE 1985nicolasPas encore d'évaluation
- 2011 International Standard Classification Education Isced 2012 en PDFDocument87 pages2011 International Standard Classification Education Isced 2012 en PDFMarian AlexandrescuPas encore d'évaluation
- AmortizedAnalysisExplained FiebrinkDocument16 pagesAmortizedAnalysisExplained FiebrinkVo Thanh Minh TuePas encore d'évaluation
- Syllabus OBECON-2018Document2 pagesSyllabus OBECON-2018nicolasPas encore d'évaluation
- Detailed Comparison of Numerical Methods For The Perturbed Sine-Gordon Equation With Impulsive ForcingDocument20 pagesDetailed Comparison of Numerical Methods For The Perturbed Sine-Gordon Equation With Impulsive ForcingnicolasPas encore d'évaluation
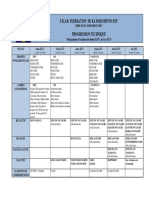
- F.K.S.R-Federation de Katori Shinto Ryu: Programme D'examen Du 6ème KYU Au 1er KYUDocument1 pageF.K.S.R-Federation de Katori Shinto Ryu: Programme D'examen Du 6ème KYU Au 1er KYUnicolasPas encore d'évaluation
- Siw4 Esa Wireless WGDocument16 pagesSiw4 Esa Wireless WGnicolasPas encore d'évaluation
- Tutorial On Maximum Likelihood EstimationDocument11 pagesTutorial On Maximum Likelihood Estimationapi-3861635100% (2)
- Capacity of Orthogonal Space-Time Block Codes in MISO Fading Channels With Co-Channel Interference and NoiseDocument8 pagesCapacity of Orthogonal Space-Time Block Codes in MISO Fading Channels With Co-Channel Interference and NoisenicolasPas encore d'évaluation
- Mil e 7016FDocument48 pagesMil e 7016FnicolasPas encore d'évaluation
- Intro To Latin Schedule BA-MADocument3 pagesIntro To Latin Schedule BA-MAnicolas100% (1)
- Art:10.1007/s11538 014 0028 6Document19 pagesArt:10.1007/s11538 014 0028 6nicolasPas encore d'évaluation
- QueueingDocument182 pagesQueueingmariaPas encore d'évaluation
- Dynamics of A High Speed Coned Thrust Bearing With A Navier Slip Boundary ConditionDocument24 pagesDynamics of A High Speed Coned Thrust Bearing With A Navier Slip Boundary ConditionnicolasPas encore d'évaluation
- Art:10.1007/s11538 014 0023 yDocument28 pagesArt:10.1007/s11538 014 0023 ynicolasPas encore d'évaluation
- Weighted Energy Problem On The Unit Sphere: Mykhailo BilogliadovDocument22 pagesWeighted Energy Problem On The Unit Sphere: Mykhailo BilogliadovnicolasPas encore d'évaluation
- Art:10.1007/s11538 016 0219 4Document15 pagesArt:10.1007/s11538 016 0219 4nicolasPas encore d'évaluation
- From Birds To Bacteria: Generalised Velocity Jump Processes With Resting StatesDocument24 pagesFrom Birds To Bacteria: Generalised Velocity Jump Processes With Resting StatesnicolasPas encore d'évaluation
- Stress FunctionsDocument4 pagesStress FunctionsDannyschPas encore d'évaluation
- 016 '06S 6mmhh: Flqta DepartmentDocument41 pages016 '06S 6mmhh: Flqta DepartmentnicolasPas encore d'évaluation
- Dynamics of A High Speed Coned Thrust Bearing With A Navier Slip Boundary ConditionDocument24 pagesDynamics of A High Speed Coned Thrust Bearing With A Navier Slip Boundary ConditionnicolasPas encore d'évaluation
- Art:10.1007/s11538 014 9976 0Document21 pagesArt:10.1007/s11538 014 9976 0nicolasPas encore d'évaluation
- Mil e 7016f Notice 1Document1 pageMil e 7016f Notice 1nicolasPas encore d'évaluation
- Sistema de Propulsión HipersónicoDocument24 pagesSistema de Propulsión HipersónicoVictor Manuel Urdiales ÁlvarezPas encore d'évaluation
- Thesis Neo Ubc 2007Document235 pagesThesis Neo Ubc 2007nicolasPas encore d'évaluation
- SAR Tutorial March 2013Document38 pagesSAR Tutorial March 2013karedokPas encore d'évaluation
- SAR Image Segmentation Using The Roughness InformationDocument5 pagesSAR Image Segmentation Using The Roughness InformationnicolasPas encore d'évaluation
- Achieving IEC 61508 Compliance With LDRA Tool SuiteDocument16 pagesAchieving IEC 61508 Compliance With LDRA Tool SuiteHimalya BansalPas encore d'évaluation
- Uniclass 2015 April 2020 UpdateDocument48 pagesUniclass 2015 April 2020 Updateabdullah sahibPas encore d'évaluation
- QMS - of A CompanyDocument172 pagesQMS - of A CompanyAvinash ShrivastavaPas encore d'évaluation
- Appendix A Responsibility Assignment Matrix (RAM)Document15 pagesAppendix A Responsibility Assignment Matrix (RAM)Gregory FernandezPas encore d'évaluation
- Real Time Manual Testing MCQDocument31 pagesReal Time Manual Testing MCQRajesh100% (1)
- Bl-Cs-371-Lec-1922s Introduction To Software EnggDocument131 pagesBl-Cs-371-Lec-1922s Introduction To Software Enggchadskie20Pas encore d'évaluation
- Online Mobile Shopping: Mr. Sanjay Kumar YadavDocument16 pagesOnline Mobile Shopping: Mr. Sanjay Kumar YadavManojSinghPas encore d'évaluation
- Unit 1:basic of Software TestingDocument32 pagesUnit 1:basic of Software TestingMayur NarsalePas encore d'évaluation
- Advanced Software EngineeringDocument53 pagesAdvanced Software EngineeringGreeshmPas encore d'évaluation
- Software Processes and Agile PracticesDocument9 pagesSoftware Processes and Agile PracticesМаргарита0% (1)
- Jss Science and Technological University (Formerly SJCE), MysuruDocument31 pagesJss Science and Technological University (Formerly SJCE), MysuruDhananjay JahagirdarPas encore d'évaluation
- RI MES3053 - Sem220142015Document8 pagesRI MES3053 - Sem220142015mujahadahPas encore d'évaluation
- Amcom Reg. 385-17 - Software System Safety PolicyDocument91 pagesAmcom Reg. 385-17 - Software System Safety PolicyJay Jay100% (1)
- A4Q Selenium 4 Tester FoundationDocument92 pagesA4Q Selenium 4 Tester Foundationtrami1Pas encore d'évaluation
- PV Elite and CodeCalc Verification ManualDocument10 pagesPV Elite and CodeCalc Verification ManualMukesh ChopraPas encore d'évaluation
- FFDocument12 pagesFFQuennee Ronquillo EscobilloPas encore d'évaluation
- Hospital Management SystemDocument56 pagesHospital Management Systemkannan21121986Pas encore d'évaluation
- How To Simplify Compliance With The New ISO 13485 2016 Final PDFDocument63 pagesHow To Simplify Compliance With The New ISO 13485 2016 Final PDFAymen Bekir100% (3)
- Agile Test PlanDocument11 pagesAgile Test Planketantank09100% (2)
- Call Taxi SystemDocument54 pagesCall Taxi SystemRock champ100% (2)
- Department of Computer Science and Engineering: Subject Name: Subject Code: CS E71Document63 pagesDepartment of Computer Science and Engineering: Subject Name: Subject Code: CS E71NANDHINI AKPas encore d'évaluation
- Things To Comply For The Prototype Presentation (Deliberation)Document2 pagesThings To Comply For The Prototype Presentation (Deliberation)Sherwin GipitPas encore d'évaluation
- Structure & Content of Software Engineering Standards-1Document11 pagesStructure & Content of Software Engineering Standards-1Rehan EjazPas encore d'évaluation
- Unit 4 - Software Engineering - WWW - Rgpvnotes.inDocument12 pagesUnit 4 - Software Engineering - WWW - Rgpvnotes.inNazma QureshiPas encore d'évaluation
- Process Framework: Module-4 SyllabusDocument86 pagesProcess Framework: Module-4 SyllabusRama D NPas encore d'évaluation
- Software Quality Assurance IntroductionDocument72 pagesSoftware Quality Assurance Introductionfmohiy100% (6)
- Vista Architect DsDocument4 pagesVista Architect DsAnonymous G1iPoNOKPas encore d'évaluation
- Sample Questions:: Section I: Subjective QuestionsDocument7 pagesSample Questions:: Section I: Subjective QuestionsVinesh Am100% (1)
- Documentation On Global It SuccessDocument61 pagesDocumentation On Global It SuccessChowkidar Saurav SinghPas encore d'évaluation
- Dr. Eko Cahyono Universitas Darma PersadaDocument27 pagesDr. Eko Cahyono Universitas Darma PersadaAlbiones SukkiPas encore d'évaluation