Vous aimerez peut-être aussi
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1D'EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Évaluation : 2.5 sur 5 étoiles2.5/5 (3)
- Practical Troubleshooting of Electrical Equipment and Control CircuitsD'EverandPractical Troubleshooting of Electrical Equipment and Control CircuitsÉvaluation : 4 sur 5 étoiles4/5 (5)
- Introduction to Power System ProtectionD'EverandIntroduction to Power System ProtectionPas encore d'évaluation
- System Analysis With The MVA Method For Symmetrical Three-Phase FaultsDocument6 pagesSystem Analysis With The MVA Method For Symmetrical Three-Phase Faultsrajpre1213Pas encore d'évaluation
- AREVA Relay Test Format ModifDocument97 pagesAREVA Relay Test Format ModifAUHEBEZPas encore d'évaluation
- Cts and Vts TheoryDocument20 pagesCts and Vts Theorymvpradeep87Pas encore d'évaluation
- Voltage Sag and Interruptions-2Document112 pagesVoltage Sag and Interruptions-2raghav4life8724Pas encore d'évaluation
- Voltage Sag Analysis Case StudiesDocument7 pagesVoltage Sag Analysis Case Studiesmonirul_ahmedPas encore d'évaluation
- Evaluating Motor and Transformer Inrush CurrentsDocument4 pagesEvaluating Motor and Transformer Inrush CurrentsMind of BeautyPas encore d'évaluation
- Power Transformer MaintenanceDocument19 pagesPower Transformer Maintenanceadnan80% (5)
- Transformer REFDocument4 pagesTransformer REFs_banerjeePas encore d'évaluation
- ENA - EREC - G81-1 - Issue 3 - (2016) - Final - v3 PDFDocument23 pagesENA - EREC - G81-1 - Issue 3 - (2016) - Final - v3 PDFRajendra Prasad ShuklaPas encore d'évaluation
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsD'EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsPas encore d'évaluation
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlD'EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlÉvaluation : 5 sur 5 étoiles5/5 (1)
- Voltage and Current TransformersDocument27 pagesVoltage and Current TransformersRebekah Powell100% (1)
- Common Mode VoltageDocument8 pagesCommon Mode VoltageminhducPas encore d'évaluation
- Introduction to Power System ProtectionD'EverandIntroduction to Power System ProtectionÉvaluation : 5 sur 5 étoiles5/5 (1)
- Turn To Turn Fault For TransformerDocument20 pagesTurn To Turn Fault For Transformerdeepak2628Pas encore d'évaluation
- EE61 Power System AnalysisDocument3 pagesEE61 Power System AnalysisMartin De Boras PragashPas encore d'évaluation
- 01 PROT405 PowerSystemFaults r6Document87 pages01 PROT405 PowerSystemFaults r6Hector AguilarPas encore d'évaluation
- Power Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesD'EverandPower Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesPas encore d'évaluation
- ELEC4612-12 Exp 3 Short Circuit FaultsDocument4 pagesELEC4612-12 Exp 3 Short Circuit FaultsDavid VangPas encore d'évaluation
- Chapter 2 Literature ReviewDocument10 pagesChapter 2 Literature ReviewVerbs Flores0% (1)
- A Dynamic Voltage Restorer For Voltage Sag Mitigation in A Refinery With Induction Motor Loads-EgyptDocument8 pagesA Dynamic Voltage Restorer For Voltage Sag Mitigation in A Refinery With Induction Motor Loads-EgyptGustavo AguayoPas encore d'évaluation
- Negative-Sequence Relay Protection For Blown High-Side Transformer Fuse DetectionDocument7 pagesNegative-Sequence Relay Protection For Blown High-Side Transformer Fuse DetectionluhusapaPas encore d'évaluation
- Analysis and Control of DSTATCOM For A Line Voltage RegulationDocument6 pagesAnalysis and Control of DSTATCOM For A Line Voltage RegulationSeema P DiwanPas encore d'évaluation
- Effects Voltage Sags Industry ApplicationsDocument8 pagesEffects Voltage Sags Industry ApplicationsSJS68Pas encore d'évaluation
- Trafoi I SagsDocument8 pagesTrafoi I SagsivanramljakPas encore d'évaluation
- Transformer FaultsDocument11 pagesTransformer FaultsMusembiPas encore d'évaluation
- Stochastic Estimation of Voltage Sag Due To Faults in The Power System by Using PSCAD/EMTDC Software As A Tool For SimulationDocument5 pagesStochastic Estimation of Voltage Sag Due To Faults in The Power System by Using PSCAD/EMTDC Software As A Tool For Simulationpramod_bhatt192991Pas encore d'évaluation
- Effects of Voltage Sags On AC Motor Drives: June 1997Document5 pagesEffects of Voltage Sags On AC Motor Drives: June 1997jamalPas encore d'évaluation
- Experiment No: 4Document12 pagesExperiment No: 4Nitesh-02Pas encore d'évaluation
- Simulation For A 3 Phase Induction Motor Under Unbalanced ConditionsDocument4 pagesSimulation For A 3 Phase Induction Motor Under Unbalanced ConditionsRadu BabauPas encore d'évaluation
- Voltage Sags-Equipment Behavior: 5.1.1 Voltage Tolerance and Voltage-Tolerance CurvesDocument71 pagesVoltage Sags-Equipment Behavior: 5.1.1 Voltage Tolerance and Voltage-Tolerance CurvesOscar Felipe C.Pas encore d'évaluation
- 1338184181.7817effects of Voltage Unbanlance On Induction MotorsDocument4 pages1338184181.7817effects of Voltage Unbanlance On Induction MotorsRAPRATSINPas encore d'évaluation
- ESBI White Paper Delayed Zero Crossings Following Short Circuit PDFDocument6 pagesESBI White Paper Delayed Zero Crossings Following Short Circuit PDFbgojkovic13Pas encore d'évaluation
- Power Quaity Improvement and Sag Sweel Mitigation Using DstatcomDocument7 pagesPower Quaity Improvement and Sag Sweel Mitigation Using DstatcomMinakshi Bhakkad BhattadPas encore d'évaluation
- Unbalanced VoltagesDocument9 pagesUnbalanced Voltagesparlin71Pas encore d'évaluation
- Effect of Unbalanced Voltage On Operation of Induction Motors and Its DetectionDocument4 pagesEffect of Unbalanced Voltage On Operation of Induction Motors and Its DetectionirfandudePas encore d'évaluation
- Simulation and Comparison of DVR and DSTATCOM Used For Voltage Sag Mitigation at Distribution Side-359Document9 pagesSimulation and Comparison of DVR and DSTATCOM Used For Voltage Sag Mitigation at Distribution Side-359Nirav RanaPas encore d'évaluation
- Power Quality Improvement For Non Linear Ffe96ec1Document6 pagesPower Quality Improvement For Non Linear Ffe96ec1Muhammad AzisPas encore d'évaluation
- Implementation of Dynamic Voltage Restorer (DVR) and Distribution Static Compensator (D-STATCOM) For Power Quality ImprovementDocument7 pagesImplementation of Dynamic Voltage Restorer (DVR) and Distribution Static Compensator (D-STATCOM) For Power Quality Improvementtaner56Pas encore d'évaluation
- 2 CDC 112114 R 0201Document3 pages2 CDC 112114 R 0201sasuke0176Pas encore d'évaluation
- Exp5. VTDocument10 pagesExp5. VTMohammed Abu Al HaijaPas encore d'évaluation
- CIRED2015 1082 FinalDocument5 pagesCIRED2015 1082 FinaljlskdfjPas encore d'évaluation
- Garg 2014Document6 pagesGarg 2014Deep GandhiPas encore d'évaluation
- Induction Motor Behavior Under Short Interruptions and Voltage SagsDocument5 pagesInduction Motor Behavior Under Short Interruptions and Voltage SagsnadalllabeedPas encore d'évaluation
- Electrical Fault Detection in Three Phase Squirrel Cage Induction Motor by Vibration Analysis Using MEMS Accelerometer.Document6 pagesElectrical Fault Detection in Three Phase Squirrel Cage Induction Motor by Vibration Analysis Using MEMS Accelerometer.Jose Luis Hernandez CoronaPas encore d'évaluation
- Module IvDocument14 pagesModule Ivbobby4u143Pas encore d'évaluation
- Active Series CompensatorDocument4 pagesActive Series CompensatorFadzli TohidPas encore d'évaluation
- Impact of Generator and Power Grid On Unit Transformer ReliabilityDocument5 pagesImpact of Generator and Power Grid On Unit Transformer ReliabilityEd ArenasPas encore d'évaluation
- 18 IJTPE Issue12 Vol4 No3 Sep2012 pp126 132Document7 pages18 IJTPE Issue12 Vol4 No3 Sep2012 pp126 132Mihir HembramPas encore d'évaluation
- Saha Nguyen IeeeDocument6 pagesSaha Nguyen IeeeLN ParasuramPas encore d'évaluation
- PQ Unit-1Document36 pagesPQ Unit-1upender raoPas encore d'évaluation
- Energy Conversion and Management: P. GnacinskiDocument7 pagesEnergy Conversion and Management: P. Gnacinskiedward antolinezPas encore d'évaluation
- 00296256Document9 pages00296256lamugre20003506Pas encore d'évaluation
- Exp # 04 - Voltage Regulation and Efficiency of A TransformerDocument15 pagesExp # 04 - Voltage Regulation and Efficiency of A TransformerIrfan HaiderPas encore d'évaluation
- 01 PROT4xx PowerSystemFaults r4Document84 pages01 PROT4xx PowerSystemFaults r4Raul MistaPas encore d'évaluation
- Analysis of Dead-Time in A Single Phase Wireless Power Transfer SystemDocument8 pagesAnalysis of Dead-Time in A Single Phase Wireless Power Transfer SystemLathaPas encore d'évaluation
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesD'EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesPas encore d'évaluation
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorD'EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorPas encore d'évaluation
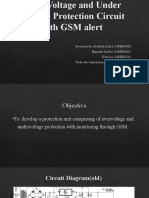
- Over Voltage and Under Voltage Protection Circuit FinalDocument10 pagesOver Voltage and Under Voltage Protection Circuit FinalHamzah RezaPas encore d'évaluation
- Impulse Voltage Generation Using MATLAB/Simulink and Its Integration in Undergraduate High Voltage Engineering CourseDocument6 pagesImpulse Voltage Generation Using MATLAB/Simulink and Its Integration in Undergraduate High Voltage Engineering CourseHamzah RezaPas encore d'évaluation
- High Voltage DC Using Marx Generator Principle: A Minor Project Report OnDocument8 pagesHigh Voltage DC Using Marx Generator Principle: A Minor Project Report OnHamzah RezaPas encore d'évaluation
- FYP Generation Electricity Piezoelectric CrystalDocument29 pagesFYP Generation Electricity Piezoelectric CrystalHamzah Reza0% (1)
- 011 Basic Knowledge of Low-Voltage Power Distribution IntroductionDocument30 pages011 Basic Knowledge of Low-Voltage Power Distribution Introductionosafo samPas encore d'évaluation
- EE462 Lab ManualDocument77 pagesEE462 Lab ManualElizabeth KellyPas encore d'évaluation
- Lab 1 DC SimulationDocument8 pagesLab 1 DC SimulationHafiz MeowPas encore d'évaluation
- E2063 Teknologi Elektrik 2 UNIT0Document11 pagesE2063 Teknologi Elektrik 2 UNIT0dbu2952Pas encore d'évaluation
- Pondicherry EB Calculator 2017 - Hemnath DeivamaniDocument2 pagesPondicherry EB Calculator 2017 - Hemnath DeivamaniAnand HemnathPas encore d'évaluation
- Sti Panel (GB) (2004)Document2 pagesSti Panel (GB) (2004)Bojan KitanovskiPas encore d'évaluation
- Password Based Circuit BreakerDocument8 pagesPassword Based Circuit BreakerRakshitha kPas encore d'évaluation
- Installation&Operation Manual For MAX PDFDocument35 pagesInstallation&Operation Manual For MAX PDFJandiego SilvaPas encore d'évaluation
- Transferencias Automaticas ABBDocument24 pagesTransferencias Automaticas ABBCesar BorregoPas encore d'évaluation
- Brosura - Clipper - 2012 (En)Document2 pagesBrosura - Clipper - 2012 (En)Cata CatalinPas encore d'évaluation
- Chapter 402-00 Power Window Switch: CatalogueDocument6 pagesChapter 402-00 Power Window Switch: CataloguejuliaPas encore d'évaluation
- FP0112 - CICED 2012 - Innovative - SWG - Full - Paper - VFDocument4 pagesFP0112 - CICED 2012 - Innovative - SWG - Full - Paper - VFJuan TobiasPas encore d'évaluation
- Solar-Generated Superheated Steam For: Clean, Reliable ElectricityDocument4 pagesSolar-Generated Superheated Steam For: Clean, Reliable Electricityhaitam terriblePas encore d'évaluation
- Transformer Success ModificationDocument1 pageTransformer Success Modificationv6656Pas encore d'évaluation
- Ji32Iweqhjhjhjjop, E9Uweeiowuweuhjqwhjwqhhwqjdhjwjk Xjasljxlassja Short-Circuit Design Forces in Power Lines and SubstationsDocument14 pagesJi32Iweqhjhjhjjop, E9Uweeiowuweuhjqwhjwqhhwqjdhjwjk Xjasljxlassja Short-Circuit Design Forces in Power Lines and Substationsamit77999Pas encore d'évaluation
- Huayi: Refrigeration CompressorDocument2 pagesHuayi: Refrigeration CompressorVARDANPas encore d'évaluation
- 9ha Power PlantsDocument2 pages9ha Power PlantsIzzadAfif1990Pas encore d'évaluation
- To Simulate, Design & Implementation of Maximum Power Harvesting of Solar Energy by Using DC-DC ConverterDocument6 pagesTo Simulate, Design & Implementation of Maximum Power Harvesting of Solar Energy by Using DC-DC Convertershrawani rajputPas encore d'évaluation
- Grid1 - Final-Report - GR1S - CompleteDocument3 pagesGrid1 - Final-Report - GR1S - CompleteAbdel-Rahman Saifedin ArandasPas encore d'évaluation
- MINI-DC-UPS/12DC/4: Uninterruptible Power Supply With Integrated Power Supply UnitDocument13 pagesMINI-DC-UPS/12DC/4: Uninterruptible Power Supply With Integrated Power Supply UnitiambadassPas encore d'évaluation
- GSCH006 Bare Conductor and Ground Wire For HV Lines - vB.01Document15 pagesGSCH006 Bare Conductor and Ground Wire For HV Lines - vB.01fernandacastellPas encore d'évaluation
- GhyrhDocument8 pagesGhyrhWilliam CairesPas encore d'évaluation
- Earthing LayoutDocument1 pageEarthing LayoutSumit TyagiPas encore d'évaluation
- En E1zm, E1z1Document3 pagesEn E1zm, E1z1retrueke1170Pas encore d'évaluation
- Elevator Brushes, Springs, Holders & Coils: Product CatalogDocument27 pagesElevator Brushes, Springs, Holders & Coils: Product Catalogzied ben hassinePas encore d'évaluation
- Manual Gencon PDFDocument97 pagesManual Gencon PDFwilly190486Pas encore d'évaluation
- The Spicy Saga 10KWDocument12 pagesThe Spicy Saga 10KWAsterism TechPro RajasthanPas encore d'évaluation
- Ss5150c GmeDocument3 pagesSs5150c GmeEulerMartinsDeMelloPas encore d'évaluation