Vous aimerez peut-être aussi
- Nonlinear Control Feedback Linearization Sliding Mode ControlD'EverandNonlinear Control Feedback Linearization Sliding Mode ControlPas encore d'évaluation
- Adaptive Control Ss2011 Vl02 WWWDocument20 pagesAdaptive Control Ss2011 Vl02 WWWVirag MehtaPas encore d'évaluation
- Two-Degree-of-Freedom Control Systems: The Youla Parameterization ApproachD'EverandTwo-Degree-of-Freedom Control Systems: The Youla Parameterization ApproachPas encore d'évaluation
- Class 2 - Mathematical Modeling Using Transfer Function ApproachDocument14 pagesClass 2 - Mathematical Modeling Using Transfer Function Approachapi-26676616Pas encore d'évaluation
- Lab3 2Document49 pagesLab3 2علاء الدين العولقيPas encore d'évaluation
- How Students Are GradedDocument4 pagesHow Students Are GradedSagar JoshiPas encore d'évaluation
- PCTDocument19 pagesPCTRachit KanchanPas encore d'évaluation
- Chapter - 5 - The Performance of Feedback Control Systems - W2015Document91 pagesChapter - 5 - The Performance of Feedback Control Systems - W2015120200421003nPas encore d'évaluation
- Manual 2dDocument148 pagesManual 2dRaja Reddy100% (2)
- Lecture 02 AV-356 System ModelingDocument28 pagesLecture 02 AV-356 System ModelingUsama NazirPas encore d'évaluation
- Thuật Toán Điều Khiển1Document23 pagesThuật Toán Điều Khiển1Văn Nghĩa NguyễnPas encore d'évaluation
- Decentralized and Fixed-Structure H Control in MATLAB PDFDocument6 pagesDecentralized and Fixed-Structure H Control in MATLAB PDFMohammad SadiqPas encore d'évaluation
- Folien Simulink Systeme eDocument16 pagesFolien Simulink Systeme ePhạm Ngọc HòaPas encore d'évaluation
- EE5104 Adaptive Control Systems Part IDocument57 pagesEE5104 Adaptive Control Systems Part IbastaaPas encore d'évaluation
- Feedback Control Theory: A Computer System's PerspectiveDocument52 pagesFeedback Control Theory: A Computer System's PerspectiveAlberto Garcia CarrilloPas encore d'évaluation
- Danial ReportDocument11 pagesDanial ReportImran AliPas encore d'évaluation
- Adaptive DP For Discrete Time LQR Optimal Tracking Control Problems With Unknown DynamicsDocument6 pagesAdaptive DP For Discrete Time LQR Optimal Tracking Control Problems With Unknown Dynamicssree pradhaPas encore d'évaluation
- Observability of Fractional Linear Systems With Singularity: Dengguo Xu, Qinglin Wang, Yuan LiDocument5 pagesObservability of Fractional Linear Systems With Singularity: Dengguo Xu, Qinglin Wang, Yuan LiHarry DuanPas encore d'évaluation
- ME330- spring-2022 Part 1 فصل الربيع 2022Document41 pagesME330- spring-2022 Part 1 فصل الربيع 2022saad SdPas encore d'évaluation
- MATLAB and Its Control ToolboxDocument41 pagesMATLAB and Its Control ToolboxzkqasimPas encore d'évaluation
- Matlab Simulink For Control082pDocument39 pagesMatlab Simulink For Control082pWills TtaccaPas encore d'évaluation
- Effects of ZoH and Controller DesignDocument22 pagesEffects of ZoH and Controller DesignSufiSayyidZakiyahPas encore d'évaluation
- Experiment-1: AIM: For The Given Train Model, Find The State Space ModelDocument26 pagesExperiment-1: AIM: For The Given Train Model, Find The State Space ModelIchigoPas encore d'évaluation
- Control Theory 11Document50 pagesControl Theory 11faestningPas encore d'évaluation
- Me 363 - GhonlineDocument81 pagesMe 363 - GhonlineEmmanuel AmoakoPas encore d'évaluation
- Ifac2012 Working With Time-Delay Systems in MATLAB Suat GumussoyDocument6 pagesIfac2012 Working With Time-Delay Systems in MATLAB Suat GumussoyBouazizi HechmiPas encore d'évaluation
- Closed-Loop DynamicsDocument20 pagesClosed-Loop Dynamicsjunhao_tan_1100% (1)
- Control Systems Week 1Document67 pagesControl Systems Week 1Mahmoud AliPas encore d'évaluation
- Project Report: A Linear Programming Approach For Dynamic System Control With Inequality ConstraintsDocument14 pagesProject Report: A Linear Programming Approach For Dynamic System Control With Inequality ConstraintsuttamPas encore d'évaluation
- Control of Siso SystemsDocument64 pagesControl of Siso SystemsAhmed QaziPas encore d'évaluation
- ICSENT12 ProceedingsDocument18 pagesICSENT12 ProceedingsmezianePas encore d'évaluation
- Easy ChairDocument6 pagesEasy ChairclaudyanePas encore d'évaluation
- Lab #2: PI Controller Design and Second Order SystemsDocument4 pagesLab #2: PI Controller Design and Second Order SystemssamielmadssiaPas encore d'évaluation
- Control Systems Lab - SC4070: DR - Ir. Alessandro AbateDocument39 pagesControl Systems Lab - SC4070: DR - Ir. Alessandro AbatemakroumPas encore d'évaluation
- Mathematic Modelling of Dynamic SYSTEMS Ch. 2Document31 pagesMathematic Modelling of Dynamic SYSTEMS Ch. 2Irtiza IshrakPas encore d'évaluation
- Microsoft PowerPoint - Lecture1 DSK - Modeling Rev.08.09.2014Document55 pagesMicrosoft PowerPoint - Lecture1 DSK - Modeling Rev.08.09.2014Syahrul RamdaniPas encore d'évaluation
- Ec Formula Notes 11Document369 pagesEc Formula Notes 11Tharun kondaPas encore d'évaluation
- Analogue Realizations of Fractional-Order ControllersDocument16 pagesAnalogue Realizations of Fractional-Order Controllerstarunag72801Pas encore d'évaluation
- LST - Spring 2015 - Lecture - Week 1-2Document19 pagesLST - Spring 2015 - Lecture - Week 1-2Waseem ChPas encore d'évaluation
- Ilc Intro Pdftex03 03Document59 pagesIlc Intro Pdftex03 03KARKAR NORAPas encore d'évaluation
- ACC13 l1 Ac AnalysisDocument6 pagesACC13 l1 Ac AnalysisJovan BoskovicPas encore d'évaluation
- El 3015 Sistem Kendali: Control SystemsDocument24 pagesEl 3015 Sistem Kendali: Control SystemsCend AkhinovPas encore d'évaluation
- Linear Systems: Prof. Dr. João Edgar Chaves Filho Mestrado em Eng. ElétricaDocument49 pagesLinear Systems: Prof. Dr. João Edgar Chaves Filho Mestrado em Eng. ElétricaAndré AraújoPas encore d'évaluation
- T-S Model-Based Nonlinear Moving-Horizon Control and ApplicationsDocument19 pagesT-S Model-Based Nonlinear Moving-Horizon Control and ApplicationsRaminptPas encore d'évaluation
- Assignment 1Document4 pagesAssignment 1Utkarsh AryaPas encore d'évaluation
- Week1 Elec372Document9 pagesWeek1 Elec372mantaptoPas encore d'évaluation
- CDC 2005 1583310Document6 pagesCDC 2005 1583310SowrirajanPas encore d'évaluation
- Jay H Lee - MPC Lecture NotesDocument137 pagesJay H Lee - MPC Lecture NotesVnomiksPas encore d'évaluation
- Control Crash CourseDocument41 pagesControl Crash Courseraa2010Pas encore d'évaluation
- Mfa Merit Exercises 5 Simulink 5174 2Document8 pagesMfa Merit Exercises 5 Simulink 5174 2JamesPas encore d'évaluation
- Where Are We ?Document18 pagesWhere Are We ?HenryNielsenPas encore d'évaluation
- CDS 110b Norms of Signals and SystemsDocument10 pagesCDS 110b Norms of Signals and SystemsSatyavir YadavPas encore d'évaluation
- Feedback and Control Systems: Activity No. 2 - Time Response of Dynamic SystemsDocument15 pagesFeedback and Control Systems: Activity No. 2 - Time Response of Dynamic SystemsYvesExequielPascuaPas encore d'évaluation
- Lec#19-24 - Laplace DomainDocument42 pagesLec#19-24 - Laplace DomainDaniya AbbasiPas encore d'évaluation
- Backwoods Control TheoryDocument18 pagesBackwoods Control TheoryakozyPas encore d'évaluation
- Lecture 4Document7 pagesLecture 4ganiyamanPas encore d'évaluation
- OpuNarcisse DigitalFeedbackControlDocument10 pagesOpuNarcisse DigitalFeedbackControlDario Jose Gonzalez GuacarePas encore d'évaluation
- Induced L Output Feedback Control For Continuous-Time SystemsDocument5 pagesInduced L Output Feedback Control For Continuous-Time Systemsjitenderkumar_goyal28Pas encore d'évaluation
- Adaptive Control Ss2011 Vl04 WWWDocument10 pagesAdaptive Control Ss2011 Vl04 WWWVirag MehtaPas encore d'évaluation
- Adaptive Control Ss2011 Vl09 WWWDocument24 pagesAdaptive Control Ss2011 Vl09 WWWVirag MehtaPas encore d'évaluation
- Adaptive Control Ss2011 Vl01 WWWDocument22 pagesAdaptive Control Ss2011 Vl01 WWWVirag MehtaPas encore d'évaluation
- First Aid SSCEDocument74 pagesFirst Aid SSCEVirag MehtaPas encore d'évaluation
- T3000 FrontDocument6 pagesT3000 FrontVirag MehtaPas encore d'évaluation
- Modbus SlaveDocument140 pagesModbus SlaveIoana Ancuța MoisePas encore d'évaluation
- PLC TutorialDocument19 pagesPLC TutorialJilani Hayder100% (1)
- Process Control SystemsDocument242 pagesProcess Control SystemsAbdul_KSAPas encore d'évaluation
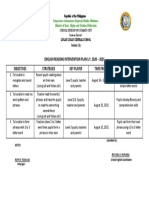
- English Reading Intervention Plan S.Y. 2020 - 2021 Objectives Strategies Key Player Time Frame Expected OutputDocument1 pageEnglish Reading Intervention Plan S.Y. 2020 - 2021 Objectives Strategies Key Player Time Frame Expected OutputMaribel A. BustilloPas encore d'évaluation
- Buying Behaviour of Mobile PhoneDocument7 pagesBuying Behaviour of Mobile PhoneHms SameerPas encore d'évaluation
- 8 StepsDocument2 pages8 Stepsarunsahayakumar100% (1)
- Particle Swarm Optimization: LIACS Natural Computing Group Leiden UniversityDocument22 pagesParticle Swarm Optimization: LIACS Natural Computing Group Leiden UniversityAhmed GamalPas encore d'évaluation
- NatureDocument1 pageNatureDaisy Rose TangonanPas encore d'évaluation
- B Tech DTDP PDFDocument2 pagesB Tech DTDP PDF18011BC031 charanPas encore d'évaluation
- Academic Performance of Mayamot National High School For School Year 2021-2022 and 2022-2023Document4 pagesAcademic Performance of Mayamot National High School For School Year 2021-2022 and 2022-2023Aaron James LicoPas encore d'évaluation
- Assessing Grammar - PurpuraDocument25 pagesAssessing Grammar - PurpuraTchaikovsky TehPas encore d'évaluation
- Dara Ayu 6A 193101067 Type of ImageDocument3 pagesDara Ayu 6A 193101067 Type of ImagedaraPas encore d'évaluation
- Field Study 5Document8 pagesField Study 5Enrico MercadoPas encore d'évaluation
- Materi 10 Passive Voice, Subjunctive, Corelative ConjunctionDocument6 pagesMateri 10 Passive Voice, Subjunctive, Corelative Conjunctionindri suprianiPas encore d'évaluation
- TURKISH GRAMMAR UPDATED ACADEMIC EDITION YÜKSEL GÖKNEL September 2013-SignedDocument443 pagesTURKISH GRAMMAR UPDATED ACADEMIC EDITION YÜKSEL GÖKNEL September 2013-SignedgoknelyPas encore d'évaluation
- Emp Unit-1 Communication SkillsDocument14 pagesEmp Unit-1 Communication SkillsSaraswathi GopalPas encore d'évaluation
- Intrinsic and Extrinsic MotivationDocument9 pagesIntrinsic and Extrinsic MotivationAsad AliPas encore d'évaluation
- Principles of Classification of WordsDocument26 pagesPrinciples of Classification of WordsJohn AngolluanPas encore d'évaluation
- Herber Harold 1959 Web PDFDocument245 pagesHerber Harold 1959 Web PDFarc08Pas encore d'évaluation
- The Impact of Video Lessons On The Academic Performance of Senior High School Students at Arellano University - Jose Rizal CampusDocument6 pagesThe Impact of Video Lessons On The Academic Performance of Senior High School Students at Arellano University - Jose Rizal CampusJohn Lloyd TomacaPas encore d'évaluation
- Psychoanalytic Process Research StrategiesDocument378 pagesPsychoanalytic Process Research StrategiesbrthstPas encore d'évaluation
- Makalah Fix Kelompok 2 Indirect Speech ActsDocument12 pagesMakalah Fix Kelompok 2 Indirect Speech ActsBunga RefiraPas encore d'évaluation
- LP Balancing EquationDocument2 pagesLP Balancing EquationRenz FerrerPas encore d'évaluation
- Universal Design Learning Lesson PlanDocument20 pagesUniversal Design Learning Lesson Planapi-243411808Pas encore d'évaluation
- Teaching On Spiritual Care. ASSETDocument7 pagesTeaching On Spiritual Care. ASSETjanuar rizqiPas encore d'évaluation
- How To Make Best Use of This Book: What Is A Large Multilevel Class?Document15 pagesHow To Make Best Use of This Book: What Is A Large Multilevel Class?IrguensPas encore d'évaluation
- Policy LintDocument19 pagesPolicy LintShane FengPas encore d'évaluation
- Types of ListeningDocument2 pagesTypes of ListeningShafira Vidiastri100% (1)
- A Critical Analysis of Evaluation Practice: The Kirkpatrick Model and The Principle of BeneficenceDocument8 pagesA Critical Analysis of Evaluation Practice: The Kirkpatrick Model and The Principle of BeneficenceDedet TriwahyudiPas encore d'évaluation
- Fall Thematic UnitDocument8 pagesFall Thematic Unitapi-584804285Pas encore d'évaluation
- How To Assess Vocabulary PDFDocument14 pagesHow To Assess Vocabulary PDFDanielaPas encore d'évaluation
- Topic Sentence Lesson PlanDocument6 pagesTopic Sentence Lesson Planapi-397089431100% (1)