Vous aimerez peut-être aussi
- 15 Day Detox ChallengeDocument84 pages15 Day Detox ChallengeDanii Supergirl Bailey100% (4)
- Small Unmanned Aircraft: Theory and PracticeD'EverandSmall Unmanned Aircraft: Theory and PracticeÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)
- Anatomy of the pulp cavity กย 2562-1Document84 pagesAnatomy of the pulp cavity กย 2562-1IlincaVasilescuPas encore d'évaluation
- Obstacle Avoidance For Unmanned Aerial Vehicles: Gonçalo Charters Santos Cruz Pedro Miguel Martins EncarnaçãoDocument15 pagesObstacle Avoidance For Unmanned Aerial Vehicles: Gonçalo Charters Santos Cruz Pedro Miguel Martins EncarnaçãoCraneo LocoPas encore d'évaluation
- Robust Take-Off For A Quadrotor VehicleDocument9 pagesRobust Take-Off For A Quadrotor Vehicleelguerrero66Pas encore d'évaluation
- 3 SafetyAssesment SelfDocument12 pages3 SafetyAssesment Selfnicolae adrian DincaPas encore d'évaluation
- Trajectory Path Control of Multiple Unmanned Aerial VehiclesDocument4 pagesTrajectory Path Control of Multiple Unmanned Aerial VehiclesdormentryPas encore d'évaluation
- Robotics: Cooperative Optimization of Uavs Formation Visual TrackingDocument22 pagesRobotics: Cooperative Optimization of Uavs Formation Visual TrackingEngMohamedReyadHelesyPas encore d'évaluation
- Completion of Collision Avoidance Control Algorithm For Multicopters Based On Geometrical ConstraintsDocument17 pagesCompletion of Collision Avoidance Control Algorithm For Multicopters Based On Geometrical ConstraintsAtiso OtisaPas encore d'évaluation
- Research Collection: Continuous-Time Trajectory Optimization For Online UAV ReplanningDocument9 pagesResearch Collection: Continuous-Time Trajectory Optimization For Online UAV ReplanningЄвген ВознюкPas encore d'évaluation
- Collision Avoidance Strategies For Unmanned Aerial Vehicles in Formation FlightDocument17 pagesCollision Avoidance Strategies For Unmanned Aerial Vehicles in Formation FlightAnonymous t5MrKaXDPas encore d'évaluation
- Particle Swarm Optimization For Target Encirclement by A UAV FormationDocument8 pagesParticle Swarm Optimization For Target Encirclement by A UAV FormationMuhammad ShafiqPas encore d'évaluation
- Collision Avoidance in Fixed-Wing UAV Formation Flight Based On A Consensus Control AlgorithmDocument11 pagesCollision Avoidance in Fixed-Wing UAV Formation Flight Based On A Consensus Control Algorithmphantuan8antPas encore d'évaluation
- Asadi2021 Article Fault-TolerantTrajectoryTrackiDocument14 pagesAsadi2021 Article Fault-TolerantTrajectoryTrackiYaser NabaviPas encore d'évaluation
- Addis Ababa University Addis Ababa Institute of Technology School of Electrical and Computer EngineeringDocument23 pagesAddis Ababa University Addis Ababa Institute of Technology School of Electrical and Computer Engineeringbegziew getnetPas encore d'évaluation
- Research Article Mission Planning For Unmanned Aerial Vehicles Based On Voronoi Diagram-Tabu Genetic AlgorithmDocument12 pagesResearch Article Mission Planning For Unmanned Aerial Vehicles Based On Voronoi Diagram-Tabu Genetic AlgorithmSofia KaramitsianiPas encore d'évaluation
- Reliable Robust Flight Tracking Control: An LMI ApproachDocument14 pagesReliable Robust Flight Tracking Control: An LMI ApproachPriyanka ChowdaryPas encore d'évaluation
- Comparison of Parallel Genetic Algorithm andDocument10 pagesComparison of Parallel Genetic Algorithm andNAENWI YAABARIPas encore d'évaluation
- Consensus-Based Cooperative Formation Control With Collision Avoidance For A Multi-UAV SystemDocument7 pagesConsensus-Based Cooperative Formation Control With Collision Avoidance For A Multi-UAV Systemphantuan8antPas encore d'évaluation
- RG Dcs LPR Eco Robotica08Document6 pagesRG Dcs LPR Eco Robotica08endoparasitePas encore d'évaluation
- A Complexity Indicator For 4D Flight Trajectories Based On Conflict ProbabilityDocument6 pagesA Complexity Indicator For 4D Flight Trajectories Based On Conflict Probability18rosa18Pas encore d'évaluation
- Efficient 3D Path Planning For Drone Swarm Using IDocument30 pagesEfficient 3D Path Planning For Drone Swarm Using IVTOL ODTÜPas encore d'évaluation
- Literature Review20Document52 pagesLiterature Review20roshan212001Pas encore d'évaluation
- Landing Route Planning Method For Micro Drones Based On HybridDocument5 pagesLanding Route Planning Method For Micro Drones Based On HybridGhalidh ChoirPas encore d'évaluation
- Smooth Obstacle Avoidance Path Planning For Autonomous VehiclesDocument6 pagesSmooth Obstacle Avoidance Path Planning For Autonomous VehiclesRubénGómezGómezPas encore d'évaluation
- Real Time and Post-Processing Flight Inspection by Drone: A ReviewDocument8 pagesReal Time and Post-Processing Flight Inspection by Drone: A Reviewfika puteraPas encore d'évaluation
- Remote Sensing: A Review On Iot Deep Learning Uav Systems For Autonomous Obstacle Detection and Collision AvoidanceDocument29 pagesRemote Sensing: A Review On Iot Deep Learning Uav Systems For Autonomous Obstacle Detection and Collision AvoidanceMatheus Cardoso SantosPas encore d'évaluation
- Drones: Optimization Methods Applied To Motion Planning of Unmanned Aerial Vehicles: A ReviewDocument22 pagesDrones: Optimization Methods Applied To Motion Planning of Unmanned Aerial Vehicles: A ReviewvanhaimtaPas encore d'évaluation
- Decentralized ControlDocument31 pagesDecentralized Controlfalcon_vamPas encore d'évaluation
- Multi-UAV Cooperation and Control For Load Transportation and DeploymentDocument28 pagesMulti-UAV Cooperation and Control For Load Transportation and DeploymentBella SalimaPas encore d'évaluation
- Addis Ababa University Addis Ababa Institute of Technology School of Electrical and Computer EngineeringDocument22 pagesAddis Ababa University Addis Ababa Institute of Technology School of Electrical and Computer Engineeringbegziew getnetPas encore d'évaluation
- Comparative Study of Indoor Navigation S-1Document11 pagesComparative Study of Indoor Navigation S-1Jayashree T R 21PHD1140Pas encore d'évaluation
- Cooperative Distributed Robust Trajectory Optimization Using Receding Horizon Milp, TCST.2010.2045501Document9 pagesCooperative Distributed Robust Trajectory Optimization Using Receding Horizon Milp, TCST.2010.2045501Mehmed BrkićPas encore d'évaluation
- Low-Altitude Navigation For Multi-Rotor Drones in Urban AreasDocument16 pagesLow-Altitude Navigation For Multi-Rotor Drones in Urban AreasAdeeba AliPas encore d'évaluation
- Autonomous Uavs: Cooperative Tracking of Moving Targets by A Team ofDocument9 pagesAutonomous Uavs: Cooperative Tracking of Moving Targets by A Team ofArun GopinathPas encore d'évaluation
- Finite Time Formation Tracking Control With Collis - 2020 - Journal of The FrankDocument42 pagesFinite Time Formation Tracking Control With Collis - 2020 - Journal of The FrankBogdan BungardiPas encore d'évaluation
- A Review On Motion Control of Unmanned Ground and AerialDocument14 pagesA Review On Motion Control of Unmanned Ground and Aerialyasir9909Pas encore d'évaluation
- Sensors 20 01080Document18 pagesSensors 20 01080Juan SzymanskiPas encore d'évaluation
- 2-Distributed Formation and Reconfiguration Control of VTOL UAVsDocument8 pages2-Distributed Formation and Reconfiguration Control of VTOL UAVsWaqas HussainPas encore d'évaluation
- Multi-UAV Cooperative Trajectory Planning Based On Many-Objective Evolutionary AlgorithmDocument12 pagesMulti-UAV Cooperative Trajectory Planning Based On Many-Objective Evolutionary AlgorithmSofia KaramitsianiPas encore d'évaluation
- Itsc 2023 Mda-4Document9 pagesItsc 2023 Mda-4CATIA BACKUPPas encore d'évaluation
- Collision Avoidence For Vehicle Following PDFDocument12 pagesCollision Avoidence For Vehicle Following PDFsuviryPas encore d'évaluation
- Eaoa: Energy-Aware Grid-Based 3D-Obstacle Avoidance in Coverage Path Planning For UavsDocument21 pagesEaoa: Energy-Aware Grid-Based 3D-Obstacle Avoidance in Coverage Path Planning For UavsSami FarhatPas encore d'évaluation
- Optimized Uav Flight Mission Planning Using STK & A AlgorithmDocument3 pagesOptimized Uav Flight Mission Planning Using STK & A AlgorithmijeteeditorPas encore d'évaluation
- UAV Path Planning Based On Receding Horizon Control With Adaptive StrategyDocument5 pagesUAV Path Planning Based On Receding Horizon Control With Adaptive StrategySofia KaramitsianiPas encore d'évaluation
- Simulation of A Fixed-Wing UAV Forced La PDFDocument10 pagesSimulation of A Fixed-Wing UAV Forced La PDFbang nguyen dinhPas encore d'évaluation
- Simulation of A Fixed-Wing UAV Forced La PDFDocument10 pagesSimulation of A Fixed-Wing UAV Forced La PDFbang nguyen dinhPas encore d'évaluation
- Bicego2020 Article NonlinearModelPredictiveContro PDFDocument35 pagesBicego2020 Article NonlinearModelPredictiveContro PDFEddylson Aguilar CasquinoPas encore d'évaluation
- Minorpaper PDFDocument19 pagesMinorpaper PDFKartikPas encore d'évaluation
- Computers: Towards Self-Aware Multirotor FormationsDocument29 pagesComputers: Towards Self-Aware Multirotor FormationslaeeeqPas encore d'évaluation
- Multi-UAV Systems For Scalability in Last-Mile Logisitics With Formation ControlDocument4 pagesMulti-UAV Systems For Scalability in Last-Mile Logisitics With Formation ControlÖmer Talha BoyacıoğluPas encore d'évaluation
- Enhanced Backstepping Controller Design With ApplicationDocument27 pagesEnhanced Backstepping Controller Design With ApplicationmohammedPas encore d'évaluation
- Performance Analysis of Vertically Offset Overlapped Propulsion Sytem Based Quadrotor in An Aerial Mapping MissionDocument16 pagesPerformance Analysis of Vertically Offset Overlapped Propulsion Sytem Based Quadrotor in An Aerial Mapping MissionAndika VIrdianPas encore d'évaluation
- Performance Evaluation of Multi-UAV System in Post-Disaster Application: Validated by HITL SimulatorDocument15 pagesPerformance Evaluation of Multi-UAV System in Post-Disaster Application: Validated by HITL SimulatorMarko SimićPas encore d'évaluation
- Chen2013 PDFDocument17 pagesChen2013 PDFirqoviPas encore d'évaluation
- Relative Position-Based Collision Avoidance System For Swarming UAVS Using Multi-Sensor FusionDocument7 pagesRelative Position-Based Collision Avoidance System For Swarming UAVS Using Multi-Sensor FusionmiguelPas encore d'évaluation
- Ocean Engineering: Yu WuDocument12 pagesOcean Engineering: Yu WuhermionePas encore d'évaluation
- 2020 An Overview Survey and Challenges in UAVs Communication NetworkDocument6 pages2020 An Overview Survey and Challenges in UAVs Communication Networktoan đinhPas encore d'évaluation
- 2004 04 Spe Iag DubDocument12 pages2004 04 Spe Iag DubLuis VelascoPas encore d'évaluation
- Conflict Detection and Resolution in Air Traffic Management Based On Graph Coloring Problem Using Imperialist Competitive AlgorithmDocument16 pagesConflict Detection and Resolution in Air Traffic Management Based On Graph Coloring Problem Using Imperialist Competitive AlgorithmijitcajournalPas encore d'évaluation
- PPS Energy-Aware Grid-Based Coverage Path PlanningDocument32 pagesPPS Energy-Aware Grid-Based Coverage Path PlanningSami FarhatPas encore d'évaluation
- 22 Khan S.Document7 pages22 Khan S.scholarlyreseachjPas encore d'évaluation
- AMULDocument11 pagesAMULkeshav956Pas encore d'évaluation
- Radon-222 Exhalation From Danish Building Material PDFDocument63 pagesRadon-222 Exhalation From Danish Building Material PDFdanpalaciosPas encore d'évaluation
- Sem4 Complete FileDocument42 pagesSem4 Complete Fileghufra baqiPas encore d'évaluation
- RFID Seminar AbstractDocument2 pagesRFID Seminar Abstractanushabhagawath80% (5)
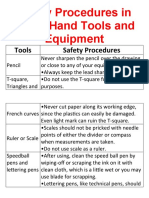
- Safety Procedures in Using Hand Tools and EquipmentDocument12 pagesSafety Procedures in Using Hand Tools and EquipmentJan IcejimenezPas encore d'évaluation
- Epson Stylus Pro 7900/9900: Printer GuideDocument208 pagesEpson Stylus Pro 7900/9900: Printer GuideJamesPas encore d'évaluation
- CV & Surat Lamaran KerjaDocument2 pagesCV & Surat Lamaran KerjaAci Hiko RickoPas encore d'évaluation
- WBDocument59 pagesWBsahil.singhPas encore d'évaluation
- Fire Protection in BuildingsDocument2 pagesFire Protection in BuildingsJames Carl AriesPas encore d'évaluation
- Health Post - Exploring The Intersection of Work and Well-Being - A Guide To Occupational Health PsychologyDocument3 pagesHealth Post - Exploring The Intersection of Work and Well-Being - A Guide To Occupational Health PsychologyihealthmailboxPas encore d'évaluation
- Tutorial 5 SolvedDocument3 pagesTutorial 5 SolvedAshutoshKumarPas encore d'évaluation
- ASHRAE Journal - Absorption RefrigerationDocument11 pagesASHRAE Journal - Absorption Refrigerationhonisme0% (1)
- Microsmart GEODTU Eng 7Document335 pagesMicrosmart GEODTU Eng 7Jim JonesjrPas encore d'évaluation
- Implementation of E-Governance To Improve The Civil Administration Service Quality in Public SectorDocument11 pagesImplementation of E-Governance To Improve The Civil Administration Service Quality in Public SectorChristie YohanaPas encore d'évaluation
- ISO 27001 Introduction Course (05 IT01)Document56 pagesISO 27001 Introduction Course (05 IT01)Sheik MohaideenPas encore d'évaluation
- Jackson V AEGLive - May 10 Transcripts, of Karen Faye-Michael Jackson - Make-up/HairDocument65 pagesJackson V AEGLive - May 10 Transcripts, of Karen Faye-Michael Jackson - Make-up/HairTeamMichael100% (2)
- What's New in CAESAR II: Piping and Equipment CodesDocument1 pageWhat's New in CAESAR II: Piping and Equipment CodeslnacerPas encore d'évaluation
- Algoritm BackTracking EnglezaDocument6 pagesAlgoritm BackTracking Englezaionutz_67Pas encore d'évaluation
- Biography Thesis ExamplesDocument7 pagesBiography Thesis Examplesreneewardowskisterlingheights100% (2)
- Apple Change ManagementDocument31 pagesApple Change ManagementimuffysPas encore d'évaluation
- Bullshit System v0.5Document40 pagesBullshit System v0.5ZolaniusPas encore d'évaluation
- C2 - Conveyors Diagram: Peso de Faja Longitud de CargaDocument1 pageC2 - Conveyors Diagram: Peso de Faja Longitud de CargaIvan CruzPas encore d'évaluation
- Physics Education Thesis TopicsDocument4 pagesPhysics Education Thesis TopicsPaperWriterServicesCanada100% (2)
- Lieh TzuDocument203 pagesLieh TzuBrent Cullen100% (2)
- Configuring BGP On Cisco Routers Lab Guide 3.2Document106 pagesConfiguring BGP On Cisco Routers Lab Guide 3.2skuzurov67% (3)
- Dermatology Skin in Systemic DiseaseDocument47 pagesDermatology Skin in Systemic DiseaseNariska CooperPas encore d'évaluation
- Music 10 (2nd Quarter)Document8 pagesMusic 10 (2nd Quarter)Dafchen Villarin MahasolPas encore d'évaluation