Vous aimerez peut-être aussi
- Mechanics of Materials - Chapter 5Document50 pagesMechanics of Materials - Chapter 5Claudia534Pas encore d'évaluation
- Design of Machinery: Robert L. NortonDocument17 pagesDesign of Machinery: Robert L. Nortonsab87Pas encore d'évaluation
- Instructors Solutions Manual To AccompanDocument296 pagesInstructors Solutions Manual To AccompanJames GolezPas encore d'évaluation
- This Crane Boom On A Ship Has A Moment of Inertia That Varies Along Its LengthDocument3 pagesThis Crane Boom On A Ship Has A Moment of Inertia That Varies Along Its LengthRandy de GuzmanPas encore d'évaluation
- Vector Adhesive Spray ApplicatorDocument2 pagesVector Adhesive Spray ApplicatorITWDynatecPas encore d'évaluation
- Rizzoni Problemas Capítulo 7Document8 pagesRizzoni Problemas Capítulo 7nicole ortizPas encore d'évaluation
- Limit and Fit Data BooDocument18 pagesLimit and Fit Data Booविशाल पुडासैनीPas encore d'évaluation
- FEW1501 Oct Nov Exam 2020Document7 pagesFEW1501 Oct Nov Exam 2020Tshepo Moloto100% (1)
- Gears PresentationDocument33 pagesGears PresentationNaveen YadavPas encore d'évaluation
- Alciatore Mechatronics Solution Manual 5th EditionDocument16 pagesAlciatore Mechatronics Solution Manual 5th Editionsajal agarwalPas encore d'évaluation
- Machine Design 4th Edn Norton PDFDocument1 269 pagesMachine Design 4th Edn Norton PDFhaiter paredes100% (1)
- 6 - Turbomachinery-Pumps Performance 2Document31 pages6 - Turbomachinery-Pumps Performance 2medo ElrefaeyPas encore d'évaluation
- Four Bar MechanismDocument34 pagesFour Bar Mechanismumair rasheed100% (1)
- Lectures With AnnotationsDocument166 pagesLectures With AnnotationsArnav KapurPas encore d'évaluation
- CE302 MECHANICS OF MATERIALS Chapter 1 - Tutorial ProblemsDocument8 pagesCE302 MECHANICS OF MATERIALS Chapter 1 - Tutorial ProblemsAhmet TükenPas encore d'évaluation
- ELEC 205 - Lab #5: RequirementsDocument4 pagesELEC 205 - Lab #5: Requirementsশ্রীগুরু প্রপন্ন আশ্রমPas encore d'évaluation
- Fuel Technology - Tutorial QuestionsDocument5 pagesFuel Technology - Tutorial QuestionsHisyamAl-MuhammadiPas encore d'évaluation
- Design For Simple StressesDocument131 pagesDesign For Simple Stresseskhudhayer1970Pas encore d'évaluation
- Internal Expanding Rim Clutches & Brakes: (A) Clutch (B) BrakeDocument20 pagesInternal Expanding Rim Clutches & Brakes: (A) Clutch (B) BrakeALIPas encore d'évaluation
- We Have Solutions For Your Book!: See This Answer See This AnswerDocument1 pageWe Have Solutions For Your Book!: See This Answer See This AnswerNoreen Guiyab TannaganPas encore d'évaluation
- ENT345 Tutorial 1Document2 pagesENT345 Tutorial 1AmiRul SaLimi SAyutiPas encore d'évaluation
- ProblemsDocument22 pagesProblemsSuresh GoudPas encore d'évaluation
- Zener Diode Problem Set PDFDocument2 pagesZener Diode Problem Set PDFfree5050Pas encore d'évaluation
- Mechanics of Materials Chapter 1 SolutionsDocument7 pagesMechanics of Materials Chapter 1 SolutionsEvan YoungbergPas encore d'évaluation
- TSU Bearing Testbed Static and Dynamic Load Modeling, Analysis and Bearing Useful Life EstimationDocument11 pagesTSU Bearing Testbed Static and Dynamic Load Modeling, Analysis and Bearing Useful Life Estimationusama666Pas encore d'évaluation
- MAT1581 Assignment 1 - 37090119Document9 pagesMAT1581 Assignment 1 - 37090119kivenPas encore d'évaluation
- CH 14Document13 pagesCH 14mssaber77Pas encore d'évaluation
- RCH Som 01 IntroductionDocument51 pagesRCH Som 01 IntroductionSatish DhanyamrajuPas encore d'évaluation
- Dr. A. Aziz Bazoune: King Fahd University of Petroleum & Minerals Mechanical Engineering DepartmentDocument14 pagesDr. A. Aziz Bazoune: King Fahd University of Petroleum & Minerals Mechanical Engineering DepartmentIsmail DoğanPas encore d'évaluation
- Mech 325 Tutorials (Questions Only)Document54 pagesMech 325 Tutorials (Questions Only)Shahriar Norouzi ZadehPas encore d'évaluation
- Test For Buckling EulerDocument4 pagesTest For Buckling EulerGaurav GoyalPas encore d'évaluation
- Davits ReportDocument21 pagesDavits ReportJoshua ReynoldsPas encore d'évaluation
- Machine Design AssignmentDocument8 pagesMachine Design AssignmentSharthak GhoshPas encore d'évaluation
- Homework 2 SolutionDocument13 pagesHomework 2 SolutionDynamix SolverPas encore d'évaluation
- Chapter 12 SolutionsDocument27 pagesChapter 12 Solutionsantant30520% (1)
- Volumetric Efficiency For Reciprocating CompressorDocument2 pagesVolumetric Efficiency For Reciprocating CompressorKrishna PATELPas encore d'évaluation
- Stress TransformationDocument5 pagesStress TransformationCh TalhaPas encore d'évaluation
- 353 35435 ME357 2011 4 2 1 Sheet MD2Document10 pages353 35435 ME357 2011 4 2 1 Sheet MD2adel nabhanPas encore d'évaluation
- Solution of GH Ryder Strength of MaterialsDocument6 pagesSolution of GH Ryder Strength of MaterialsAbhishek0% (1)
- Microsoft Word MecvinaDocument37 pagesMicrosoft Word MecvinaRam RamirezPas encore d'évaluation
- 1 Laplace Transforms - Notes PDFDocument16 pages1 Laplace Transforms - Notes PDFSboPas encore d'évaluation
- ME259 Lecture Slides 2Document43 pagesME259 Lecture Slides 2Fan YangPas encore d'évaluation
- Dixon Turbomachinery Solution ManualDocument10 pagesDixon Turbomachinery Solution Manualmahdi sPas encore d'évaluation
- PSC Automobile Question PaperDocument12 pagesPSC Automobile Question PaperArun KPas encore d'évaluation
- Innovative Vibration Learning System PDFDocument16 pagesInnovative Vibration Learning System PDFCristian Alfonso Tibabisco JamaicaPas encore d'évaluation
- Design of Machinery Robert L. Norton: 3Rd Ed. by © Mcgraw-Hill 2004Document1 pageDesign of Machinery Robert L. Norton: 3Rd Ed. by © Mcgraw-Hill 2004Fernando Pauli PradoPas encore d'évaluation
- 6463 7193Document3 pages6463 7193JersonAlejandroTeránEnríquez0% (2)
- 22 Shaft and Its Design Based On StrengthDocument11 pages22 Shaft and Its Design Based On StrengthPRASAD326100% (4)
- P P B B A: Design of Machinery Robert L. NortonDocument1 pageP P B B A: Design of Machinery Robert L. NortonCARLOS FABIAN MELGAREJO AGUDELOPas encore d'évaluation
- RCC82 Pilecap DesignDocument1 pageRCC82 Pilecap DesignPHAN THUONG KHAIPas encore d'évaluation
- 959688-001 Q510M Installation Manual Rev 5-127Document1 page959688-001 Q510M Installation Manual Rev 5-127Anonymous pFdFBlXO00Pas encore d'évaluation
- схема AOC 50U628565TDocument21 pagesсхема AOC 50U628565TjamorPas encore d'évaluation
- Solutions Manual To Accompany Machine Design 5th Edition 013335671xDocument3 pagesSolutions Manual To Accompany Machine Design 5th Edition 013335671xJacobTorreswasmxPas encore d'évaluation
- Replacing Barber Colman Synchronisers and Load Sharing Units With The UnigenDocument5 pagesReplacing Barber Colman Synchronisers and Load Sharing Units With The UnigenejazPas encore d'évaluation
- Approved FOR Construction: - Material: Sus 304 Quantity: 1 PCDocument1 pageApproved FOR Construction: - Material: Sus 304 Quantity: 1 PCandresPas encore d'évaluation
- 12.a10emd OmDocument21 pages12.a10emd Ommohd arif fahmi mohamad salehPas encore d'évaluation
- B-CG P-CG O - CG: Counter WeightDocument1 pageB-CG P-CG O - CG: Counter WeightNebyat YazachewPas encore d'évaluation
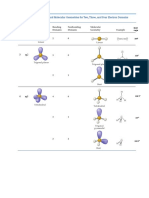
- Vsepr ChartDocument2 pagesVsepr Chartapi-239855791Pas encore d'évaluation
- Encoder Conversor Pu210 eDocument9 pagesEncoder Conversor Pu210 eChristian JuniorPas encore d'évaluation
- M-12C-003 Padding Plate Fuel Gas Cold Vent StackDocument4 pagesM-12C-003 Padding Plate Fuel Gas Cold Vent StackYurizal FirmansyahPas encore d'évaluation
- Trust-In Machine Learning ModelsDocument11 pagesTrust-In Machine Learning Modelssmartin1970Pas encore d'évaluation
- ELE Final MCQDocument141 pagesELE Final MCQSanket KarandePas encore d'évaluation
- Calculus Abstract 1 PDFDocument3 pagesCalculus Abstract 1 PDFChristian Oliver RonquilloPas encore d'évaluation
- HSC Extension II Mathematics: Chapter 1. Miscellaneous Polynomials ProblemsDocument8 pagesHSC Extension II Mathematics: Chapter 1. Miscellaneous Polynomials ProblemsSyed Hasan100% (1)
- A Neural Network Approach For Early Cost Estimation of Structural Systems of BuildingsDocument8 pagesA Neural Network Approach For Early Cost Estimation of Structural Systems of BuildingsHai Dai GiaPas encore d'évaluation
- SimA Fracture MechanicsDocument22 pagesSimA Fracture MechanicsВладимир СмирновPas encore d'évaluation
- Various A-Level Economics NotesDocument7 pagesVarious A-Level Economics NotesYasheelPas encore d'évaluation
- Shiglay SM ch17Document33 pagesShiglay SM ch17Muhammad WaqasPas encore d'évaluation
- Mroz ReplicationDocument9 pagesMroz ReplicationMateo RiveraPas encore d'évaluation
- Rogers 1959 in KochDocument38 pagesRogers 1959 in KochDirk Belau100% (2)
- MM 212 Materials Evaluation Techniques Fall Semester 2020, FMCE, GIKIDocument30 pagesMM 212 Materials Evaluation Techniques Fall Semester 2020, FMCE, GIKIElbert VonVerimPas encore d'évaluation
- Splay TreeDocument7 pagesSplay TreePraveen YadavPas encore d'évaluation
- Bridge ManualDocument13 pagesBridge ManualAzik KunouPas encore d'évaluation
- Data Chart TypesDocument16 pagesData Chart TypesjdbagleyPas encore d'évaluation
- Circular PlatformDocument6 pagesCircular PlatformRamzi GameelPas encore d'évaluation
- Project-Musical Math PDFDocument3 pagesProject-Musical Math PDFsunil makwanaPas encore d'évaluation
- NAPLAN 2008 Final Test Numeracy Year 7 Non Calculator PDFDocument12 pagesNAPLAN 2008 Final Test Numeracy Year 7 Non Calculator PDFVia RabePas encore d'évaluation
- Concept of StrategyDocument3 pagesConcept of StrategyvikasmishraelexPas encore d'évaluation
- Education in Singapore Education in Singapore Is Managed by TheDocument6 pagesEducation in Singapore Education in Singapore Is Managed by TheAlbert Caoile100% (1)
- Quantitative Aptitude Time Speed and Distance SptestprepDocument35 pagesQuantitative Aptitude Time Speed and Distance SptestprepshankarinadarPas encore d'évaluation
- PhychemDocument10 pagesPhychemMinette PacisPas encore d'évaluation
- Determinants of Customer Satisfaction and Customer Loyalty (Case Study of Café Grind & Pull Makassar)Document5 pagesDeterminants of Customer Satisfaction and Customer Loyalty (Case Study of Café Grind & Pull Makassar)IJAERS JOURNALPas encore d'évaluation
- HRM Report - Human Resource PlanningDocument32 pagesHRM Report - Human Resource PlanningKeith Amor100% (1)
- Math - Ap - Periodical Test ReviewDocument5 pagesMath - Ap - Periodical Test ReviewMae OrtizPas encore d'évaluation
- Problems and Solutions For Complex AnalysisDocument259 pagesProblems and Solutions For Complex AnalysisMete Torun91% (34)
- GRR Worksheet (Blank)Document11 pagesGRR Worksheet (Blank)Farhan ShariffPas encore d'évaluation
- E04-Ship Geometry & Hydrostatic CalculationsDocument2 pagesE04-Ship Geometry & Hydrostatic Calculationsarise tettehPas encore d'évaluation
- Tran2019 PDFDocument10 pagesTran2019 PDFRamot Hamonangan AgusDian SitompulPas encore d'évaluation
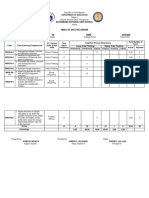
- Tos Math 8 3RD QuarterDocument2 pagesTos Math 8 3RD Quarterrmm041550% (2)
- 1.5 Differentiation Techniques Power and Sum Difference RulesDocument4 pages1.5 Differentiation Techniques Power and Sum Difference RulesVhigherlearning100% (1)