Vous aimerez peut-être aussi
- (H-2) LapHar Gasus Hari Raya Idul Fitri 1445 H THN 2024Document10 pages(H-2) LapHar Gasus Hari Raya Idul Fitri 1445 H THN 2024Rexzy SenolinggiPas encore d'évaluation
- Peserta Perbauran1Document2 pagesPeserta Perbauran1Rexzy SenolinggiPas encore d'évaluation
- (H-2) LapHar Gasus Hari Raya Idul Fitri 1445 H THN 2024Document10 pages(H-2) LapHar Gasus Hari Raya Idul Fitri 1445 H THN 2024Rexzy SenolinggiPas encore d'évaluation
- (H) LapHar Gasus Hari Raya Idul Fitri 1445 H THN 2024Document8 pages(H) LapHar Gasus Hari Raya Idul Fitri 1445 H THN 2024Rexzy SenolinggiPas encore d'évaluation
- Daftar TagihanDocument1 pageDaftar TagihanRexzy SenolinggiPas encore d'évaluation
- Data PasarDocument2 pagesData PasarRexzy SenolinggiPas encore d'évaluation
- CV NyomangDocument1 pageCV NyomangRexzy SenolinggiPas encore d'évaluation
- DocumentDocument13 pagesDocumentRexzy SenolinggiPas encore d'évaluation
- William EkoDocument5 pagesWilliam EkoRexzy SenolinggiPas encore d'évaluation
- 7 9Document1 page7 9Rexzy SenolinggiPas encore d'évaluation
- Daftar PenuntutanDocument1 pageDaftar PenuntutanRexzy SenolinggiPas encore d'évaluation
- Pokok Doa Gereja 2019 JuniDocument1 pagePokok Doa Gereja 2019 JuniRexzy SenolinggiPas encore d'évaluation
- SGBSBSDDocument1 pageSGBSBSDRexzy SenolinggiPas encore d'évaluation
- Laporan Praktikum Sistem KendaliDocument32 pagesLaporan Praktikum Sistem KendaliSelvia Kurniawanty Herlianto100% (5)
- Artikel Tasma Dan Leli (2) - 1Document7 pagesArtikel Tasma Dan Leli (2) - 1handersonPas encore d'évaluation
- Orang Kristen Yang NormalDocument10 pagesOrang Kristen Yang NormalRexzy SenolinggiPas encore d'évaluation
- Beasiswa Tahap 3Document9 pagesBeasiswa Tahap 3Rexzy SenolinggiPas encore d'évaluation
- Tugas Ke-3 (ARI FEBRIYANTO LAMBE 421 16 039)Document3 pagesTugas Ke-3 (ARI FEBRIYANTO LAMBE 421 16 039)Rexzy SenolinggiPas encore d'évaluation
- TrafoDocument7 pagesTrafoRexzy SenolinggiPas encore d'évaluation
- IsiDocument35 pagesIsiRexzy SenolinggiPas encore d'évaluation
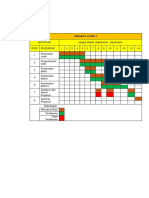
- Time ScheduleDocument2 pagesTime ScheduleRexzy SenolinggiPas encore d'évaluation
- Tugas Ke-3 (Ari Febriyanto Lambe 421 16 039)Document3 pagesTugas Ke-3 (Ari Febriyanto Lambe 421 16 039)Rexzy SenolinggiPas encore d'évaluation
- AsdfghjklDocument18 pagesAsdfghjklRexzy SenolinggiPas encore d'évaluation
- Ari Tugas 2 Pak PurwitoDocument8 pagesAri Tugas 2 Pak PurwitoRexzy SenolinggiPas encore d'évaluation
- Jurnal ASTLDocument4 pagesJurnal ASTLTia RahmaPas encore d'évaluation
- SourceDocument1 pageSourceRexzy SenolinggiPas encore d'évaluation
- Pengertian Gerbang Logika Dasar Dan JenisDocument6 pagesPengertian Gerbang Logika Dasar Dan JenisRexzy Senolinggi100% (1)
- 3.teknik Penyeimbangan BebanDocument10 pages3.teknik Penyeimbangan BebanRexzy Senolinggi50% (2)
- Biodata MahasiswaDocument1 pageBiodata MahasiswaRexzy SenolinggiPas encore d'évaluation