Vous aimerez peut-être aussi
- El Timer0 y El Timer2 en Modo PWMDocument7 pagesEl Timer0 y El Timer2 en Modo PWMKarina Collaguazo100% (1)
- Timers Avr Atmega8Document21 pagesTimers Avr Atmega8Marvin Mosquera Perez100% (1)
- PWM Timer2 AVR Modo RápidoDocument17 pagesPWM Timer2 AVR Modo RápidoJose Antonio Meza ChoquehuaytaPas encore d'évaluation
- El Timer0 Avr Atmega88Document13 pagesEl Timer0 Avr Atmega88mmonge1964Pas encore d'évaluation
- Configuración Timer0 ATmega 164pDocument41 pagesConfiguración Timer0 ATmega 164pEhf125Pas encore d'évaluation
- Timers Avr Atmega8Document7 pagesTimers Avr Atmega8Jairo SantistebanPas encore d'évaluation
- PWM On The ATmega328Document14 pagesPWM On The ATmega328Miguel Ángel Murillo RamírezPas encore d'évaluation
- 6 - TimerCounter 0 PDFDocument36 pages6 - TimerCounter 0 PDFJorge Ezequiel SchlotthauerPas encore d'évaluation
- Atmega16 Contadores y TemporizadoresDocument12 pagesAtmega16 Contadores y TemporizadoresRick HunterPas encore d'évaluation
- PWM Arduino: Guía completa de modulación por ancho de pulsoDocument11 pagesPWM Arduino: Guía completa de modulación por ancho de pulsoMauricio RdrPas encore d'évaluation
- Arduino - CC Es Tutorial SecretsOfArduinoPWMDocument7 pagesArduino - CC Es Tutorial SecretsOfArduinoPWMPedro Cu AguirrePas encore d'évaluation
- PWM Timer2 AVR Fase CorrectaDocument17 pagesPWM Timer2 AVR Fase CorrectaJose Antonio Meza ChoquehuaytaPas encore d'évaluation
- AVR Timer0 en modo normalDocument12 pagesAVR Timer0 en modo normalRicardo LimonPas encore d'évaluation
- Interrupción Timer0 Avr - MicrocontroladoresDocument10 pagesInterrupción Timer0 Avr - Microcontroladores9340Pas encore d'évaluation
- PWM en ArduinoDocument8 pagesPWM en ArduinoRicardo VelardiPas encore d'évaluation
- TimersDocument22 pagesTimersErick MartinezPas encore d'évaluation
- Los Timers o Temporizadores Son Características Estándar de Casi Todos Los MicrocontroladoresDocument16 pagesLos Timers o Temporizadores Son Características Estándar de Casi Todos Los Microcontroladoresoscar roperoPas encore d'évaluation
- AVR Programación en CDocument14 pagesAVR Programación en CAnonymous H3E7i3YzydPas encore d'évaluation
- TIMER0Document34 pagesTIMER0Jorge Ezequiel SchlotthauerPas encore d'évaluation
- 03 TimersDocument33 pages03 TimersEnrique RodriguezPas encore d'évaluation
- Temporizadores AtmegaDocument9 pagesTemporizadores AtmegaServand Gunzand RosesPas encore d'évaluation
- Timer0 PDFDocument17 pagesTimer0 PDFmi_papiPas encore d'évaluation
- Generar pulsos precisos con ATmegaDocument4 pagesGenerar pulsos precisos con ATmegaPierDonneePas encore d'évaluation
- Resumen de Timer en ArduinoDocument5 pagesResumen de Timer en ArduinoMar y CrisPas encore d'évaluation
- Labo 4 MicroDocument10 pagesLabo 4 Micromax trPas encore d'évaluation
- Fast PWM ModeDocument4 pagesFast PWM ModeangeluitaPas encore d'évaluation
- TMR0 Pic16f877Document15 pagesTMR0 Pic16f877Pedro RojasPas encore d'évaluation
- Programación de temporizadores AVR en CDocument17 pagesProgramación de temporizadores AVR en Crickypina0% (1)
- PWM MicrocontroladoresDocument18 pagesPWM MicrocontroladoresRaul AlbertoPas encore d'évaluation
- RegistrosDocument13 pagesRegistrosLeonardo BorregoPas encore d'évaluation
- Variador de Vrms - PIC16f877ADocument16 pagesVariador de Vrms - PIC16f877AArmando CajahuaringaPas encore d'évaluation
- Configuración del TMR0 para generar intervalos de 1ms y PWM en el PIC18F4550Document12 pagesConfiguración del TMR0 para generar intervalos de 1ms y PWM en el PIC18F4550isaacPas encore d'évaluation
- Modulación PWM con ATmega8Document42 pagesModulación PWM con ATmega8Jose Ruben TorresHortaPas encore d'évaluation
- Manejo de Temporizadores AVR Parte 2Document5 pagesManejo de Temporizadores AVR Parte 2rickypinaPas encore d'évaluation
- Control PWM con PIC16F628A para variar velocidad de motoresDocument13 pagesControl PWM con PIC16F628A para variar velocidad de motoresOmar Ramirez HerreraPas encore d'évaluation
- Capitulo 4 Temporizador ContadorDocument11 pagesCapitulo 4 Temporizador ContadorcoraztoPas encore d'évaluation
- Timer 0 Pic16f887Document11 pagesTimer 0 Pic16f887Jack MercuryPas encore d'évaluation
- Interrupción Timer1 AVRDocument7 pagesInterrupción Timer1 AVRJose Antonio Meza ChoquehuaytaPas encore d'évaluation
- Modulo PWM para Control de Motores (Autoguardado)Document10 pagesModulo PWM para Control de Motores (Autoguardado)Cristhian SG Pato AlamaPas encore d'évaluation
- Timer0 PICDocument12 pagesTimer0 PICJOSE RODRIGUEZPas encore d'évaluation
- Modulo PWM para Control de MotoresDocument10 pagesModulo PWM para Control de MotoresEdu Pollo Rom100% (1)
- Timers AVRDocument70 pagesTimers AVRmarkus_x86100% (1)
- Registro para Controlar Las InterrupcionesDocument10 pagesRegistro para Controlar Las InterrupcionesDiego Alejandro MayaPas encore d'évaluation
- El Temporizador Timer 0 en Los Micro Control Adores PICDocument14 pagesEl Temporizador Timer 0 en Los Micro Control Adores PICAlex OviedoPas encore d'évaluation
- Lab#7 - PWMDocument11 pagesLab#7 - PWMDenzel Vega NoePas encore d'évaluation
- Temporizador AVRDocument14 pagesTemporizador AVRJose Antonio Meza ChoquehuaytaPas encore d'évaluation
- Timer 0Document31 pagesTimer 0Arom DenimPas encore d'évaluation
- AVR1 - TimersDocument23 pagesAVR1 - TimersMANUEL ORTIZPas encore d'évaluation
- Timer Atmega1281Document16 pagesTimer Atmega1281wilsonPas encore d'évaluation
- Modulo CCP MicroDocument23 pagesModulo CCP MicroAlberto Hinojosa100% (1)
- Manejo de Timers AtmegaDocument21 pagesManejo de Timers AtmegaKarlita MuyulemaPas encore d'évaluation
- Clase 07 - TimersDocument8 pagesClase 07 - TimersJesus AvilaPas encore d'évaluation
- Practica 2 Ensamblador - Jesus Asmeth Perez Camacho PDFDocument5 pagesPractica 2 Ensamblador - Jesus Asmeth Perez Camacho PDFJesus Asmeth Perez CamachoPas encore d'évaluation
- LEDs A Distintas FrecuenciasDocument12 pagesLEDs A Distintas FrecuenciasMax GarciaPas encore d'évaluation
- Cuestionario Timer0 AprendizajeDocument6 pagesCuestionario Timer0 AprendizajeWalter Eleazar GuillenPas encore d'évaluation
- Microcontroladores IntroduccionDocument66 pagesMicrocontroladores IntroduccionAlvaro BenllochpiquerPas encore d'évaluation
- Variar Frec PWMDocument10 pagesVariar Frec PWMGustavo CircelliPas encore d'évaluation
- Expo 2Document21 pagesExpo 2Oriana MedinaPas encore d'évaluation
- 100 circuitos de shields para arduino (español)D'Everand100 circuitos de shields para arduino (español)Évaluation : 3.5 sur 5 étoiles3.5/5 (3)
- Ejercicios prácticos con Electrónica: Proyectos de electrónica con Arduino y Raspberry PiD'EverandEjercicios prácticos con Electrónica: Proyectos de electrónica con Arduino y Raspberry PiÉvaluation : 5 sur 5 étoiles5/5 (1)
- Diodos y Transistores de PotenciaDocument80 pagesDiodos y Transistores de PotenciaOliviaSanMiguelHerbas100% (1)
- Termocuplas 01Document9 pagesTermocuplas 01Amy WatsonPas encore d'évaluation
- M Sold A Dura Puntos Extract oDocument12 pagesM Sold A Dura Puntos Extract oHelmer Enrique RuizPas encore d'évaluation
- Integracion NumericaDocument81 pagesIntegracion NumericaOliviaSanMiguelHerbasPas encore d'évaluation
- Diodos y Transistores de PotenciaDocument80 pagesDiodos y Transistores de PotenciaOliviaSanMiguelHerbasPas encore d'évaluation
- Tiri StoresDocument45 pagesTiri StoresOliviaSanMiguelHerbasPas encore d'évaluation
- Tecnologia Electronica ES (Modulo 4)Document114 pagesTecnologia Electronica ES (Modulo 4)Fabian MirandaPas encore d'évaluation
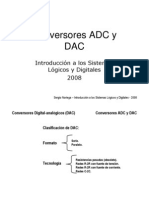
- Conversores ADC y DACDocument67 pagesConversores ADC y DACSixto JesusPas encore d'évaluation
- Solucion de EcuacionesDocument61 pagesSolucion de EcuacionesOliviaSanMiguelHerbasPas encore d'évaluation
- Circuitos Lógicos MSIDocument67 pagesCircuitos Lógicos MSIjorge741100% (1)
- Polinomios de InterpolacionDocument59 pagesPolinomios de InterpolacionOliviaSanMiguelHerbasPas encore d'évaluation
- Tabla de Códigos AsciiDocument5 pagesTabla de Códigos AsciiOliviaSanMiguelHerbasPas encore d'évaluation
- Polinomios de InterpolacionDocument59 pagesPolinomios de InterpolacionOliviaSanMiguelHerbasPas encore d'évaluation
- Diferenciacion NumericaDocument44 pagesDiferenciacion NumericaOliviaSanMiguelHerbasPas encore d'évaluation
- 10 Reglas de Oro para ReciclarDocument13 pages10 Reglas de Oro para ReciclarOliviaSanMiguelHerbas29% (7)
- Ley 1466 de 2011Document2 pagesLey 1466 de 2011medardodomPas encore d'évaluation
- Sandoval Vargas Jorge Andres Carta - de - FuncionesDocument2 pagesSandoval Vargas Jorge Andres Carta - de - FuncionesJhosep SolorzanoPas encore d'évaluation
- Orquesta Sinfónica NacionalDocument46 pagesOrquesta Sinfónica NacionalORYGUENPas encore d'évaluation
- Configuración de Dispositivos ASA Versión 1.1Document128 pagesConfiguración de Dispositivos ASA Versión 1.1Edubooks Ediciones100% (4)
- Estadistica EjerciciosDocument8 pagesEstadistica EjerciciosCarlos AndradePas encore d'évaluation
- M2S1Document4 pagesM2S1Damian MoreiraPas encore d'évaluation
- Plan estratégico para empresa de transporte Rapiditos CholomeñosDocument35 pagesPlan estratégico para empresa de transporte Rapiditos CholomeñosheydiPas encore d'évaluation
- Datos Del SicoesDocument37 pagesDatos Del SicoesSamuel Elias Barja PerezPas encore d'évaluation
- Herramienta Criptografica CriptoolDocument15 pagesHerramienta Criptografica CriptoolevericPas encore d'évaluation
- Lab 11-Estabilidad y Fluencia MarshallDocument7 pagesLab 11-Estabilidad y Fluencia MarshalljonathanPas encore d'évaluation
- Simulación Térmica. Itzia Barrera AlarcónDocument15 pagesSimulación Térmica. Itzia Barrera AlarcónItzia Gabriela Barrera AlarcónPas encore d'évaluation
- Protocolos de Comunicación IndustrialDocument5 pagesProtocolos de Comunicación IndustrialOz YmandiasPas encore d'évaluation
- CVCarla Judit Díaz Osorio 8Document3 pagesCVCarla Judit Díaz Osorio 8Jesus Damian López LamoyiPas encore d'évaluation
- NTC 4088Document11 pagesNTC 4088Juan DavidPas encore d'évaluation
- Matrices para Verificación y ControlDocument34 pagesMatrices para Verificación y ControlJuan TobonPas encore d'évaluation
- Cap 2 La Especificidad HistoricaDocument3 pagesCap 2 La Especificidad HistoricaJuanDeDiosPerezPas encore d'évaluation
- Obras de arte en carreterasDocument32 pagesObras de arte en carreterasTito Andrés Calambrito SabandijaPas encore d'évaluation
- Planes de Emergencia en Edificios y Condominios - 2010Document51 pagesPlanes de Emergencia en Edificios y Condominios - 2010Mauricio Perez San MartinPas encore d'évaluation
- Listado Productos Fuera de IMALL SiemensDocument8 pagesListado Productos Fuera de IMALL SiemensDayana Vega MedinaPas encore d'évaluation
- Problemas Modelo Basico Con FaltanteDocument8 pagesProblemas Modelo Basico Con FaltanteArturoVazquezAyalaPas encore d'évaluation
- Sesion de AprendizajeDocument41 pagesSesion de AprendizajeAracely Stefane Villa RuizPas encore d'évaluation
- Manual Dispositivos Electronicos Caterpillar Identificacion Componentes Control Monitoreo Diagnostico Analisis FallasDocument86 pagesManual Dispositivos Electronicos Caterpillar Identificacion Componentes Control Monitoreo Diagnostico Analisis FallasJose Rafael Lemus Bueno94% (31)
- Evolución del Análisis de Situación de Salud (ASIS) en ColombiaDocument4 pagesEvolución del Análisis de Situación de Salud (ASIS) en ColombiaKro NocturnaPas encore d'évaluation
- Tratamiento SuperficialDocument7 pagesTratamiento Superficialcharles velasque martinezPas encore d'évaluation
- Ecologia UrbanaDocument130 pagesEcologia UrbanaDaniel VegaPas encore d'évaluation
- 5 Guiomar Elena Ciapuscio Textos Especializados y Terminologia 20 Cop A4 20 Cop A4 PDFDocument20 pages5 Guiomar Elena Ciapuscio Textos Especializados y Terminologia 20 Cop A4 20 Cop A4 PDFROmiPas encore d'évaluation
- Plan de Gestión de Los Recursos HumanosDocument20 pagesPlan de Gestión de Los Recursos Humanosjhair_111724643100% (1)
- Informe ItaipuDocument9 pagesInforme Itaipubetox124185Pas encore d'évaluation
- Tolerancias Dimensionales (JS11 Página 17)Document19 pagesTolerancias Dimensionales (JS11 Página 17)leabel90100% (1)