Vous aimerez peut-être aussi
- Cultivo Caraota PDFDocument74 pagesCultivo Caraota PDFAgustin Perez Peñaloza0% (1)
- Integración de JPA MongoDBDocument8 pagesIntegración de JPA MongoDBJoan GarciaPas encore d'évaluation
- Plan de Desarrollo de AnapoimaDocument120 pagesPlan de Desarrollo de AnapoimaAndres Ferro100% (1)
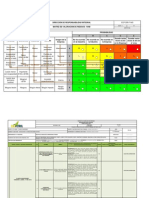
- Matriz de Auditoria AmbientalDocument8 pagesMatriz de Auditoria AmbientalAlexandra Serrano.vargasPas encore d'évaluation
- Nia 300Document37 pagesNia 300Andres Felipe RodriguezPas encore d'évaluation
- Evaluacion Del Impacto de Un Plan de Cuidados en eDocument11 pagesEvaluacion Del Impacto de Un Plan de Cuidados en eErika CidPas encore d'évaluation
- Funciones Del OperadorDocument2 pagesFunciones Del OperadorAlvaro ChicaizaPas encore d'évaluation
- Maricelys Rosario Soto - Tarea 7.2 SOSC-1010-3044ONLDocument10 pagesMaricelys Rosario Soto - Tarea 7.2 SOSC-1010-3044ONLMaricelys RosarioPas encore d'évaluation
- Laborem Exercens - Doc 2Document3 pagesLaborem Exercens - Doc 2kjaoqPas encore d'évaluation
- Admi Libro 1 ParteDocument38 pagesAdmi Libro 1 ParteAxel RodriguezPas encore d'évaluation
- Hoja BanderaDocument2 pagesHoja BanderaGuadalupe Mendoza100% (1)
- Ejercicios 3er Parcial PDFDocument1 pageEjercicios 3er Parcial PDFMariana Z.APas encore d'évaluation
- Extracto PDFDocument2 pagesExtracto PDFFreddy Felipe Morales MorenoPas encore d'évaluation
- Proyecto Sobre DronesDocument16 pagesProyecto Sobre DronesAnonymous Qv7jEici0% (2)
- Demostracion Curso Fiscalización LaboralDocument13 pagesDemostracion Curso Fiscalización LaboralGuido FigueroaPas encore d'évaluation
- Ficha Tecnica ElectrocardiografoDocument4 pagesFicha Tecnica ElectrocardiografoAlexander EspitiaPas encore d'évaluation
- AnsaDocument8 pagesAnsaBrando Andre Esquivel YauriPas encore d'évaluation
- Christian HornerDocument5 pagesChristian HornerAlbertoPas encore d'évaluation
- Correo de Universidad Peruana Cayetano Heredia - Tarifario - Pedido #3000115002Document2 pagesCorreo de Universidad Peruana Cayetano Heredia - Tarifario - Pedido #3000115002KaryMilagrosPas encore d'évaluation
- Amplitud y VelocidadDocument1 pageAmplitud y VelocidadArteezy VargayaPas encore d'évaluation
- Equipos para El Manejo de MaterialesDocument9 pagesEquipos para El Manejo de Materialesluisnoh100% (1)
- A.R - Nivelacion y Alineacion Bomba MotorDocument11 pagesA.R - Nivelacion y Alineacion Bomba MotorGonzalo Rodriguez GutierrezPas encore d'évaluation
- "Encuesta Sobre El Proceso EnfermeroDocument11 pages"Encuesta Sobre El Proceso EnfermeroMiryam PHPas encore d'évaluation
- Bitcoin Criptomonedas Y BlockchainDocument16 pagesBitcoin Criptomonedas Y BlockchainYesica Yuliana Lopez CardenasPas encore d'évaluation
- Fisioterapia Digital Lineamientos y Prospectiva CompressedDocument55 pagesFisioterapia Digital Lineamientos y Prospectiva CompressedKeren callePas encore d'évaluation
- Catálogo de Conductores Eléctricos.Document4 pagesCatálogo de Conductores Eléctricos.Xavi X QunqiPas encore d'évaluation
- Infografia CapitalDocument1 pageInfografia CapitalDiana Sanchez100% (2)
- Antecedentes de La Educación Antes de La PandemiaDocument3 pagesAntecedentes de La Educación Antes de La PandemiaDarlin GarcíaPas encore d'évaluation
- Cuarzo PanDocument101 pagesCuarzo PanPau OlazabalPas encore d'évaluation
- IzliaFlorentino Tarea3 61611575Document9 pagesIzliaFlorentino Tarea3 61611575Maliru Florentino100% (2)