Vous aimerez peut-être aussi
- Methods of Linear Control TheoryDocument20 pagesMethods of Linear Control TheoryFawaz PartoPas encore d'évaluation
- IEEE ConferenceDocument7 pagesIEEE ConferenceFawaz PartoPas encore d'évaluation
- Modeling and Control of A Rotary Inverted Pendulum Using Various Methods, Comparative Assessment and Result AnalysisDocument7 pagesModeling and Control of A Rotary Inverted Pendulum Using Various Methods, Comparative Assessment and Result AnalysisFawaz PartoPas encore d'évaluation
- Design and Finite Element Analysis of Double - Acting, Double - Ends Hydraulic Cylinder For Industrial Automation ApplicationDocument8 pagesDesign and Finite Element Analysis of Double - Acting, Double - Ends Hydraulic Cylinder For Industrial Automation ApplicationAJER JOURNALPas encore d'évaluation
- Nonlinear Control of An Inverted PendulumDocument108 pagesNonlinear Control of An Inverted PendulumFawaz PartoPas encore d'évaluation
- Full Paper Mathematical Modelling Simulation and Experimental VerificationDocument12 pagesFull Paper Mathematical Modelling Simulation and Experimental VerificationFawaz PartoPas encore d'évaluation
- Mathematical Model of The Double Effect Telescopic Hydraulic DamperDocument4 pagesMathematical Model of The Double Effect Telescopic Hydraulic DamperFawaz PartoPas encore d'évaluation
- Mathematical Model of a High Performance Pneumatic Force Actuator SystemDocument27 pagesMathematical Model of a High Performance Pneumatic Force Actuator SystemFawaz PartoPas encore d'évaluation
- 10 1 1 41 1193Document10 pages10 1 1 41 1193Daniel SileshiPas encore d'évaluation
- Positioning System with Proportional Pressure RegulatorsDocument6 pagesPositioning System with Proportional Pressure RegulatorsFawaz PartoPas encore d'évaluation
- Lec10 ControlDocument33 pagesLec10 Controlammar120Pas encore d'évaluation
- Lecture 5: Model-Free Control: David SilverDocument43 pagesLecture 5: Model-Free Control: David SilverFawaz PartoPas encore d'évaluation
- ECE311S Dynamic Systems & Control: Course Notes by Bruce Francis January 2010Document116 pagesECE311S Dynamic Systems & Control: Course Notes by Bruce Francis January 2010Karam AlmasriPas encore d'évaluation
- ControlDocument47 pagesControlFawaz PartoPas encore d'évaluation
- Lecture 37PNEUMATICS ACTUATORSDocument43 pagesLecture 37PNEUMATICS ACTUATORSpratapy234Pas encore d'évaluation
- Libro Astrom-Ch4 Control SystemsDocument33 pagesLibro Astrom-Ch4 Control SystemsjuliolaurensPas encore d'évaluation
- Xuetal Chapterrev4Document28 pagesXuetal Chapterrev4Fawaz PartoPas encore d'évaluation
- Eeee PDFDocument4 pagesEeee PDFFawaz PartoPas encore d'évaluation
- 4Document9 pages4Fawaz PartoPas encore d'évaluation
- NASA From Ping Lu Paper PDFDocument41 pagesNASA From Ping Lu Paper PDFFawaz PartoPas encore d'évaluation
- Islamic FestivalsDocument14 pagesIslamic FestivalsFawaz Parto100% (1)
- Eeee PDFDocument4 pagesEeee PDFFawaz PartoPas encore d'évaluation
- CND 013 08 081006 PDFDocument7 pagesCND 013 08 081006 PDFFawaz PartoPas encore d'évaluation
- Linearization and Stability in SimulinkDocument5 pagesLinearization and Stability in SimulinkPhạm Ngọc HòaPas encore d'évaluation
- Aircraft Landing With Decelerated Approach (Longitudinal Movement Model)Document6 pagesAircraft Landing With Decelerated Approach (Longitudinal Movement Model)Fawaz PartoPas encore d'évaluation
- Eeee PDFDocument4 pagesEeee PDFFawaz PartoPas encore d'évaluation
- Coupled Spring PDFDocument16 pagesCoupled Spring PDFa_oucharPas encore d'évaluation
- 2392 3302 PDFDocument80 pages2392 3302 PDFFawaz PartoPas encore d'évaluation
- Aircraft RotorcraftDocument26 pagesAircraft Rotorcraftmoj33Pas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Career Objective: - Ashok Leyland R&D, Chennai. Project Details: - TOPIC: - Bolted JointsDocument2 pagesCareer Objective: - Ashok Leyland R&D, Chennai. Project Details: - TOPIC: - Bolted JointsVikash JhaPas encore d'évaluation
- JPWPKL Trial 2010 p2 Mark SchemeDocument11 pagesJPWPKL Trial 2010 p2 Mark Schemetan_wooichoongPas encore d'évaluation
- 2022-2023 SHS Action PlanDocument6 pages2022-2023 SHS Action PlanHarmony LianadaPas encore d'évaluation
- Paul Rudolph: A Selective BibliographyDocument17 pagesPaul Rudolph: A Selective BibliographyadinsajaPas encore d'évaluation
- NAPCA Summer Residential Program - Resident Advisor Job AnnouncementDocument3 pagesNAPCA Summer Residential Program - Resident Advisor Job AnnouncementSheila BanuelosPas encore d'évaluation
- Personal StatementDocument2 pagesPersonal StatementMabrouq Muhammad MarzouqPas encore d'évaluation
- CrossCulturalCommDocument20 pagesCrossCulturalCommribka sibarani50% (2)
- Comparison of Learning Theories: Behaviorist, Cognitive, Social, Psychodynamic & HumanisticDocument18 pagesComparison of Learning Theories: Behaviorist, Cognitive, Social, Psychodynamic & HumanisticGio Carlo QuiambaoPas encore d'évaluation
- AIIMS Nursing 2018: Application Form, Exam Dates, EligibilityDocument4 pagesAIIMS Nursing 2018: Application Form, Exam Dates, EligibilityDelphy VarghesePas encore d'évaluation
- CHAPTER 1 2 HumssDocument9 pagesCHAPTER 1 2 HumssRovelyn PimentelPas encore d'évaluation
- (AC-S05) Week 05 - Pre-Task - Quiz - Weekly Quiz - INGLES IV (11287)Document5 pages(AC-S05) Week 05 - Pre-Task - Quiz - Weekly Quiz - INGLES IV (11287)Enith AlzamoraPas encore d'évaluation
- CHAPMAN UNIVERSITY LONDON THEATRE TOUR COURSEDocument2 pagesCHAPMAN UNIVERSITY LONDON THEATRE TOUR COURSEJason LiebsonPas encore d'évaluation
- Econ Exam 1Document3 pagesEcon Exam 1vadarsuperstarPas encore d'évaluation
- Doing PhilosophyDocument71 pagesDoing Philosophyrheamay libo-onPas encore d'évaluation
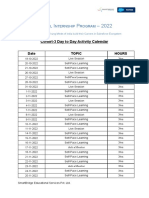
- Virtual Internship Program Activity CalendarDocument2 pagesVirtual Internship Program Activity Calendaranagha joshiPas encore d'évaluation
- De Cuong Anh 11 Ki IDocument67 pagesDe Cuong Anh 11 Ki IPhuc Hong TranPas encore d'évaluation
- Biology SyllabusDocument68 pagesBiology Syllabuskaziba stephen100% (1)
- The Comforter Has ComeDocument64 pagesThe Comforter Has ComeNkor IokaPas encore d'évaluation
- Art of CoachingDocument37 pagesArt of CoachingMukPas encore d'évaluation
- Read Spell Ass b21-24Document2 pagesRead Spell Ass b21-24Javiera Agüero StoltzePas encore d'évaluation
- Sing, Sang, Sung, Singing Irregular VerbsDocument4 pagesSing, Sang, Sung, Singing Irregular VerbsForefront PublishersPas encore d'évaluation
- Resource Unit EconomicsDocument8 pagesResource Unit EconomicsMelchor Felipe SalvosaPas encore d'évaluation
- University OF Science & TechnologyDocument60 pagesUniversity OF Science & Technologyahmed faroukPas encore d'évaluation
- Heritage Tourism in IndiaDocument13 pagesHeritage Tourism in Indiavinay narnePas encore d'évaluation
- Sample DLLDocument3 pagesSample DLLCabittaogan NhsPas encore d'évaluation
- Edexcel GCSE Mathematics (Linear) – 1MA0 ALGEBRA: EXPAND & FACTORISEDocument8 pagesEdexcel GCSE Mathematics (Linear) – 1MA0 ALGEBRA: EXPAND & FACTORISETakayuki MimaPas encore d'évaluation
- Emerging Issues and Challenges of Higher Educations in IndiaDocument6 pagesEmerging Issues and Challenges of Higher Educations in IndiaAnonymous CwJeBCAXpPas encore d'évaluation
- Final Literacy NarrativeDocument6 pagesFinal Literacy Narrativeapi-272864474100% (1)
- Zaki Hagins CVDocument2 pagesZaki Hagins CVakzohPas encore d'évaluation
- Masculinitate Vs FeminitateDocument3 pagesMasculinitate Vs FeminitateCOSMINPas encore d'évaluation