Vous aimerez peut-être aussi
- Arduino Based Automatic Water Level Indicator and Controller Project With Circuit Diagram & CodeDocument27 pagesArduino Based Automatic Water Level Indicator and Controller Project With Circuit Diagram & Codeoussama bouguerra100% (2)
- Automatic Water Level ArduinoDocument9 pagesAutomatic Water Level ArduinoShishir ZamanPas encore d'évaluation
- Automatic Water MotorDocument17 pagesAutomatic Water MotorAws FaeqPas encore d'évaluation
- A Project Report-1 NewDocument23 pagesA Project Report-1 NewMuskan SharmaPas encore d'évaluation
- Automatic Water Level Indicator and Controller Using ArduinoDocument6 pagesAutomatic Water Level Indicator and Controller Using ArduinoHari Haran100% (1)
- IOT Based Water Level Indicator using ArduinoDocument24 pagesIOT Based Water Level Indicator using Arduinomuskan sharmaPas encore d'évaluation
- Automatic Water Level Controller Using Arduino UNO.Document21 pagesAutomatic Water Level Controller Using Arduino UNO.Harsh ChoudharyPas encore d'évaluation
- A Project ReportDocument26 pagesA Project Reportmuskan sharmaPas encore d'évaluation
- Control ProjDocument14 pagesControl Projshayk omerPas encore d'évaluation
- Maharashtra State Board of Technical Education: A Project Report ONDocument10 pagesMaharashtra State Board of Technical Education: A Project Report ONLokesh DhakePas encore d'évaluation
- AADocument18 pagesAAnissarPas encore d'évaluation
- 2023 V14i6089Document4 pages2023 V14i6089ekalrudy20Pas encore d'évaluation
- Automatic Water Level Controller: Deepti Rawat, Dinesh Kumar Yadav, S.K. MahajanDocument4 pagesAutomatic Water Level Controller: Deepti Rawat, Dinesh Kumar Yadav, S.K. MahajanSounds of PeacePas encore d'évaluation
- Demelash Project FileDocument8 pagesDemelash Project FileNigussie TeferiPas encore d'évaluation
- Sciencedirect: Automatic Water Tank Filling System Controlled Using Arduino Based Sensor For Home ApplicationDocument5 pagesSciencedirect: Automatic Water Tank Filling System Controlled Using Arduino Based Sensor For Home ApplicationVian MazrPas encore d'évaluation
- Automatic Water Level Indicator and Controller Using Ultrasonic Sensor (HC-SR04) - HUB360Document16 pagesAutomatic Water Level Indicator and Controller Using Ultrasonic Sensor (HC-SR04) - HUB360oussama bouguerra100% (1)
- COA Project ReportDocument14 pagesCOA Project ReportKirtan SolankiPas encore d'évaluation
- Sbias Mini Project ReportDocument19 pagesSbias Mini Project ReportBarath BiberPas encore d'évaluation
- Automatic Water Level Indicator SystemDocument13 pagesAutomatic Water Level Indicator SystemNIRMALAPas encore d'évaluation
- Temprature Fan Speed ControlDocument49 pagesTemprature Fan Speed ControlJohnson0% (1)
- Multiparameter liquid analysis kitDocument16 pagesMultiparameter liquid analysis kitTry mePas encore d'évaluation
- Front PagesDocument20 pagesFront Pageshitesh jadhavPas encore d'évaluation
- c11 DocumentationDocument26 pagesc11 DocumentationShaik AkramPas encore d'évaluation
- Automatic Water Tank Filling SystemDocument5 pagesAutomatic Water Tank Filling SystemMuhammad AliPas encore d'évaluation
- REPORT (Copy)Document12 pagesREPORT (Copy)G.SUMAPas encore d'évaluation
- Smart Car Parking SensorsDocument17 pagesSmart Car Parking SensorsMinho Onions100% (1)
- Microcontroller Based Water Level IndicatorDocument46 pagesMicrocontroller Based Water Level IndicatorSurabhi Sadavat0% (1)
- Informe Control InglesDocument29 pagesInforme Control InglesMarcelo QuispePas encore d'évaluation
- Smart Water Supply Using Labview and Arduino: S.Vishal, G.Prashanth and N. SrinathDocument8 pagesSmart Water Supply Using Labview and Arduino: S.Vishal, G.Prashanth and N. SrinathSomeone WhoPas encore d'évaluation
- Developing an Ultrasonic Oil Level IndicatorDocument11 pagesDeveloping an Ultrasonic Oil Level IndicatorHarshal PatilPas encore d'évaluation
- Automatic irrigation system controls water pumpDocument10 pagesAutomatic irrigation system controls water pumpswami thatiPas encore d'évaluation
- Automatic Rain TimerDocument37 pagesAutomatic Rain TimerSusan MathewPas encore d'évaluation
- Automatic Plant Watering SystemDocument18 pagesAutomatic Plant Watering SystemSAMEER KAPOOR82% (17)
- Report - Pump Room AutomationDocument12 pagesReport - Pump Room AutomationtanujgatePas encore d'évaluation
- DTW-II Project S23 Batch-14Document16 pagesDTW-II Project S23 Batch-14venkata HimavanthPas encore d'évaluation
- Measuring Water Flow Rate and Volume UsiDocument30 pagesMeasuring Water Flow Rate and Volume UsiRamulu VeesamPas encore d'évaluation
- Air Pollution MonitoringDocument21 pagesAir Pollution MonitoringOmkar VinchurkarPas encore d'évaluation
- Automatic Irrigation SystemDocument15 pagesAutomatic Irrigation Systemrajat sharmaPas encore d'évaluation
- 68 (Page 683-690)Document8 pages68 (Page 683-690)Sandra NaimPas encore d'évaluation
- Digital Dash Board AutomissionDocument72 pagesDigital Dash Board AutomissionVinayaga ProjectinstitutePas encore d'évaluation
- A Project Report On: Submitted By: Nikhil PrasadDocument22 pagesA Project Report On: Submitted By: Nikhil Prasadradhey kumarPas encore d'évaluation
- Measuring Height with Arduino and Ultrasonic SensorDocument19 pagesMeasuring Height with Arduino and Ultrasonic SensorAravind YellenkiPas encore d'évaluation
- Automation Code-1Document5 pagesAutomation Code-1api-594759083Pas encore d'évaluation
- Automatic Water Level Indicator and Controller Using Arduino Provides Real-Time Tank Monitoring and Pump ControlDocument8 pagesAutomatic Water Level Indicator and Controller Using Arduino Provides Real-Time Tank Monitoring and Pump ControlHumayun ArshadPas encore d'évaluation
- Cse 323 ProjectDocument8 pagesCse 323 Projecttasfia2829Pas encore d'évaluation
- Minor Project Synopsis ReportDocument19 pagesMinor Project Synopsis ReportCharanpreet SinghPas encore d'évaluation
- Water Level Controller Project ReportDocument25 pagesWater Level Controller Project ReportChunduru RajaPas encore d'évaluation
- LABORATORY 5. Automations Using Ultrasonic Snesor and DC MotorDocument7 pagesLABORATORY 5. Automations Using Ultrasonic Snesor and DC MotorPatrick Vallon100% (2)
- A Project Based Lab Report WATER LEVEL IDocument44 pagesA Project Based Lab Report WATER LEVEL Ihafizajemal9Pas encore d'évaluation
- A&U DM DOC Mini ProDocument49 pagesA&U DM DOC Mini ProPriyaPas encore d'évaluation
- Automatic Garbage Intimator Final ReportDocument28 pagesAutomatic Garbage Intimator Final ReportPola AshutoshPas encore d'évaluation
- Control water pump with Arduino and SMSDocument6 pagesControl water pump with Arduino and SMSlena cpaPas encore d'évaluation
- Final Report - Boiler AutomationDocument62 pagesFinal Report - Boiler Automationdhirajsingh_avit90% (10)
- Survillance Rover Final ReportDocument57 pagesSurvillance Rover Final ReportAdhiraj SaxenaPas encore d'évaluation
- Research Paper 1Document3 pagesResearch Paper 155-MBET-18Pas encore d'évaluation
- Report Traffic SignalDocument21 pagesReport Traffic SignalFaizan AhmadPas encore d'évaluation
- Automated Water DispenserDocument27 pagesAutomated Water DispenserRonel BragaPas encore d'évaluation
- Humidity & Temperature Monitoring System by Using ArduinoDocument53 pagesHumidity & Temperature Monitoring System by Using ArduinoMohammad Yasir100% (8)
- Gowtham Final DocumentDocument40 pagesGowtham Final DocumentAshok PPas encore d'évaluation
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsD'EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsPas encore d'évaluation
- 003.ii Ece - R19 - Eca - QBDocument7 pages003.ii Ece - R19 - Eca - QBBhargava GPas encore d'évaluation
- Chapter Four: Bipolar Digital CircuitsDocument12 pagesChapter Four: Bipolar Digital CircuitsSOURABH SHARMAPas encore d'évaluation
- LG Cm6520-ApDocument94 pagesLG Cm6520-ApMike DavidPas encore d'évaluation
- ZXCDocument39 pagesZXCMohit TanwarPas encore d'évaluation
- Multiple Choice Questions on NanotechnologyDocument12 pagesMultiple Choice Questions on NanotechnologysindhujaPas encore d'évaluation
- Rohini 55318033145Document6 pagesRohini 55318033145arunbavaPas encore d'évaluation
- My Replication of Windows BendiniDocument14 pagesMy Replication of Windows BendinimaramdiPas encore d'évaluation
- Investors Presentation: Roy Porat, CEO - Moshe Eisenberg, CFODocument22 pagesInvestors Presentation: Roy Porat, CEO - Moshe Eisenberg, CFOotteromPas encore d'évaluation
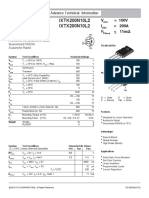
- Littelfuse Discrete MOSFETs N-Channel Linear IXT 200N10 Datasheet PDFDocument6 pagesLittelfuse Discrete MOSFETs N-Channel Linear IXT 200N10 Datasheet PDFRace Automotive ElectronicsPas encore d'évaluation
- Guide To Sympathetic TrippingDocument2 pagesGuide To Sympathetic TrippingTrebor SantosPas encore d'évaluation
- Studying Soldering TechniquesDocument4 pagesStudying Soldering Techniquesyaseen sheikhPas encore d'évaluation
- 3rd SemDocument13 pages3rd SemKiran KumarPas encore d'évaluation
- Chap 06 HMWK SolDocument72 pagesChap 06 HMWK Solapi-3841575Pas encore d'évaluation
- IS4000P 180-190-200Wp ENDocument1 pageIS4000P 180-190-200Wp ENSiddhartha SenguptaPas encore d'évaluation
- Airlab Manual v2.03Document76 pagesAirlab Manual v2.03andreslazarilloPas encore d'évaluation
- Rfid (GRP101-105)Document42 pagesRfid (GRP101-105)Engr. CasmirPas encore d'évaluation
- Lecture 14 Memory InterfaceDocument19 pagesLecture 14 Memory Interfacenjpar0% (2)
- TSSP4038: Vishay SemiconductorsDocument5 pagesTSSP4038: Vishay SemiconductorsCarlos AlbertoPas encore d'évaluation
- Lopower TutasDocument7 pagesLopower TutasNabil IshamPas encore d'évaluation
- Finally Power DiodeDocument8 pagesFinally Power DiodeAndrei50% (2)
- Time Delay Relays - Understanding Their FunctionsDocument6 pagesTime Delay Relays - Understanding Their FunctionsDražen ĐukićPas encore d'évaluation
- Holophane Emergency Panelite Series Brochure 9-79Document2 pagesHolophane Emergency Panelite Series Brochure 9-79Alan MastersPas encore d'évaluation
- Abb Acs604 (Es)Document94 pagesAbb Acs604 (Es)ndani10Pas encore d'évaluation
- Freescale ARM Cortex M Embedded ElectroVolt - IrDocument46 pagesFreescale ARM Cortex M Embedded ElectroVolt - IrVanarajPas encore d'évaluation
- Sintering and Related Phenomena - Proceedings of The Third International Conference On Sintering and Related Phenomena, Held at The University of Notre Dame, June 5-7, 1972 PDFDocument450 pagesSintering and Related Phenomena - Proceedings of The Third International Conference On Sintering and Related Phenomena, Held at The University of Notre Dame, June 5-7, 1972 PDFbicky180Pas encore d'évaluation
- PCF8574 Remote 8-Bit I/O Expander For I C Bus: 2 1 Features 3 DescriptionDocument42 pagesPCF8574 Remote 8-Bit I/O Expander For I C Bus: 2 1 Features 3 DescriptionZoran ConstantinescuPas encore d'évaluation
- EE 120 - Interfacing With The Analog WorldDocument8 pagesEE 120 - Interfacing With The Analog WorldAids SumaldePas encore d'évaluation
- Service Manual Model: Lm-U1050a, Lms-U1050Document57 pagesService Manual Model: Lm-U1050a, Lms-U1050SAMSOON27100% (3)
- MasterDrives CUVC Frequency ConvertersDocument35 pagesMasterDrives CUVC Frequency ConvertersHồng ĐạtPas encore d'évaluation
- PDN Analyzer Demonstration GuideDocument24 pagesPDN Analyzer Demonstration GuideLuis PerdomoPas encore d'évaluation