Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Pickup Guide PDFDocument2 pagesPickup Guide PDFSemmi HemmiPas encore d'évaluation
- 1993-11 The Computer Paper - Ontario EditionDocument84 pages1993-11 The Computer Paper - Ontario EditionthecomputerpaperPas encore d'évaluation
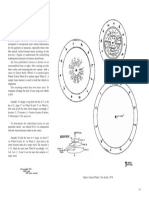
- Small WheelDocument1 pageSmall WheelSemmi HemmiPas encore d'évaluation
- Pipelined Processor DesignDocument28 pagesPipelined Processor DesignLihau TanPas encore d'évaluation
- Chapter 1 KeyDocument18 pagesChapter 1 Keyrktiwary256034Pas encore d'évaluation
- Big Chord Wheel For GuitarDocument5 pagesBig Chord Wheel For GuitartorquevillePas encore d'évaluation
- CAD SignedAdder Project 2015-05-09Document2 pagesCAD SignedAdder Project 2015-05-09Semmi HemmiPas encore d'évaluation
- JTM1 Handbook PDFDocument5 pagesJTM1 Handbook PDFSemmi Hemmi100% (1)
- Ecma 262Document566 pagesEcma 262Juan Luis H GPas encore d'évaluation
- 15 BAHons CMP Award Doc PT v2Document74 pages15 BAHons CMP Award Doc PT v2Feel0% (1)
- DIMEONLINE Prospectus Creative SongwritingDocument5 pagesDIMEONLINE Prospectus Creative SongwritingSemmi HemmiPas encore d'évaluation
- Pacific Antenna Easy TR Switch KitDocument8 pagesPacific Antenna Easy TR Switch KitRu RickjamesPas encore d'évaluation
- Ft-Oct 22 FinalDocument79 pagesFt-Oct 22 FinalOmkar Balasaheb MetkariPas encore d'évaluation
- LTE Parameter RelatedDocument47 pagesLTE Parameter RelatedsalafrfPas encore d'évaluation
- Chopper ReportDocument37 pagesChopper ReportcoolsinghrkPas encore d'évaluation
- IEEE Titles and Research & Development Projects For Students ofDocument11 pagesIEEE Titles and Research & Development Projects For Students ofvijaykannamallaPas encore d'évaluation
- DTMF Based Door Opening System REPORTDocument20 pagesDTMF Based Door Opening System REPORTprashant0% (1)
- Mikrobus SpecificationDocument1 pageMikrobus SpecificationeeindustrialPas encore d'évaluation
- Mixing Guide, Recording, Midas ConoleDocument9 pagesMixing Guide, Recording, Midas ConoleJan HypePas encore d'évaluation
- Glass passivated avalanche diode datasheetDocument5 pagesGlass passivated avalanche diode datasheetEugenio Liberatori SvogerPas encore d'évaluation
- Chapter 4Document27 pagesChapter 4MohammedPas encore d'évaluation
- LASER PRINTER SERVICE MANUALDocument131 pagesLASER PRINTER SERVICE MANUALBayardo AguilarPas encore d'évaluation
- Digital TransmissionDocument6 pagesDigital TransmissionHannahmhel MuanaPas encore d'évaluation
- Code Course Bachelor's Degree Engineering inDocument19 pagesCode Course Bachelor's Degree Engineering inbkvuvce8170Pas encore d'évaluation
- Combinational Circuit Lab GuideDocument10 pagesCombinational Circuit Lab GuideHiếu ShidoPas encore d'évaluation
- DVD ResetDocument3 pagesDVD Resettecnologo456Pas encore d'évaluation
- LTE Principle and LTE PlanningDocument70 pagesLTE Principle and LTE PlanningShain SalimPas encore d'évaluation
- Service Manual: Mixing ConsoleDocument78 pagesService Manual: Mixing ConsoleSantiago JacoboPas encore d'évaluation
- Comfort Controller 6400Document4 pagesComfort Controller 6400edu_3Pas encore d'évaluation
- Information Systems MsDocument5 pagesInformation Systems MskarthikchanakyaPas encore d'évaluation
- FEMALE CONNECTOR SYMBOL (es.J 2/1) PLUG IN CONNECTOR SYMBOLDocument12 pagesFEMALE CONNECTOR SYMBOL (es.J 2/1) PLUG IN CONNECTOR SYMBOLFlaco Depaulo CarlosPas encore d'évaluation
- Ezform Cables CatalogDocument19 pagesEzform Cables CatalogradianfmPas encore d'évaluation
- Rjp30h1dpp MoDocument6 pagesRjp30h1dpp MoAnonymous JIvcJUPas encore d'évaluation
- Manuel For 2hss Close Loop Step DriverDocument35 pagesManuel For 2hss Close Loop Step DriverTuấn Nguyễn TrungPas encore d'évaluation
- ADC ImpqnsDocument4 pagesADC Impqnsss mPas encore d'évaluation
- Alstom CT Calculation GuideDocument2 pagesAlstom CT Calculation Guidesrinivasaphanikiran67% (3)
- DFT For SRAMDocument9 pagesDFT For SRAMsuneeldvPas encore d'évaluation
- Customised Design of 16-Bit DSP Processor For Signal Processing ApplicationsDocument6 pagesCustomised Design of 16-Bit DSP Processor For Signal Processing Applicationspraveensd601Pas encore d'évaluation
- 8051 Microcontroller Part 1Document21 pages8051 Microcontroller Part 1Sardar IrfanullahPas encore d'évaluation
- Lc500due Sfr2 LGDocument37 pagesLc500due Sfr2 LGdrdr61Pas encore d'évaluation