Vous aimerez peut-être aussi
- Electrical and Electronic Principles 3 Checkbook: The Checkbook SeriesD'EverandElectrical and Electronic Principles 3 Checkbook: The Checkbook SeriesPas encore d'évaluation
- Z Bus FaultDocument6 pagesZ Bus FaultSajin SahadevPas encore d'évaluation
- Tables of Coulomb Wave Functions: Whittaker FunctionsD'EverandTables of Coulomb Wave Functions: Whittaker FunctionsPas encore d'évaluation
- chp10 3Document3 pageschp10 3as dds aaadPas encore d'évaluation
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27D'EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27Pas encore d'évaluation
- ProjectDocument2 pagesProjectusman akbarPas encore d'évaluation
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesD'EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesÉvaluation : 1.5 sur 5 étoiles1.5/5 (2)
- Lecture - 4.5 - FaultAnalysisDocument9 pagesLecture - 4.5 - FaultAnalysisajay meshramPas encore d'évaluation
- LLG FaultDocument8 pagesLLG Faultranjish_007Pas encore d'évaluation
- GATE ECE 2011 Actual PaperDocument34 pagesGATE ECE 2011 Actual Paperkibrom atsbhaPas encore d'évaluation
- Chapter 4: Unsymmetrical Faults: 4.1 PreambleDocument17 pagesChapter 4: Unsymmetrical Faults: 4.1 PreamblesethPas encore d'évaluation
- Electric Charges and Fields 03 - DPP - Pragati (PCM) KannadaDocument5 pagesElectric Charges and Fields 03 - DPP - Pragati (PCM) Kannadamanojmanu113manuPas encore d'évaluation
- GATE Study Material, Forum, Downloads, Discussions & More!Document17 pagesGATE Study Material, Forum, Downloads, Discussions & More!Ajay NarvariyaPas encore d'évaluation
- Transmission Lines: 1 Single Transmission-Line EquationsDocument5 pagesTransmission Lines: 1 Single Transmission-Line EquationsIoan TudosaPas encore d'évaluation
- Examen de Calculo SeriesDocument7 pagesExamen de Calculo SeriesCarlos Jesus Koo LabrinPas encore d'évaluation
- AptlDocument5 pagesAptlDesmon SiagianPas encore d'évaluation
- Topicwise exam questions for Electronics and CommunicationsDocument43 pagesTopicwise exam questions for Electronics and CommunicationsMallik's ChannelPas encore d'évaluation
- Symmetrical FaultsDocument9 pagesSymmetrical FaultsManish Kumar BhardwajPas encore d'évaluation
- An Analytic Formula of The Current Distribution For The VLF Horizontal Wire Antenna Above Lossy Half-Space H.-T. Chen, J.-X. Luo, and D.-K. ZhangDocument10 pagesAn Analytic Formula of The Current Distribution For The VLF Horizontal Wire Antenna Above Lossy Half-Space H.-T. Chen, J.-X. Luo, and D.-K. ZhangMilica RancicPas encore d'évaluation
- Mathematics Linear AlgebraDocument4 pagesMathematics Linear Algebratejaswankhade1031Pas encore d'évaluation
- Electrical Engg 2013Document16 pagesElectrical Engg 2013Srimannarayana NandamPas encore d'évaluation
- Electrical Engg 2013Document16 pagesElectrical Engg 2013JADDUPas encore d'évaluation
- Imp QpaperDocument3 pagesImp QpaperskmlsuPas encore d'évaluation
- Pyq 2020-2023 Sem2-1Document17 pagesPyq 2020-2023 Sem2-1Aditya RajPas encore d'évaluation
- GATE ECE 2004 Actual PaperDocument24 pagesGATE ECE 2004 Actual Paperkibrom atsbhaPas encore d'évaluation
- Chapter 3Document26 pagesChapter 3kokoaung 30697Pas encore d'évaluation
- Computerized control exam pulses sampled systemDocument7 pagesComputerized control exam pulses sampled systemDonovan PeñaPas encore d'évaluation
- EE5320: Analog Integrated Circuit Design Assignment 1Document2 pagesEE5320: Analog Integrated Circuit Design Assignment 1Kiran KumarPas encore d'évaluation
- Geometry of Conditioned Invariant FlagsDocument14 pagesGeometry of Conditioned Invariant FlagsFrancisco Javier Puerta CollPas encore d'évaluation
- 24 Semiconductor 20212223 1Document16 pages24 Semiconductor 20212223 1Samyak JainPas encore d'évaluation
- 15A04403 Electromagnetic Theory & Transmission LinesDocument2 pages15A04403 Electromagnetic Theory & Transmission LinesRadhika MahankaliPas encore d'évaluation
- Sample 02 - Class12Document21 pagesSample 02 - Class12vasudevanrv9405Pas encore d'évaluation
- HW2 SolutionsDocument5 pagesHW2 SolutionsMohammed Hamid RasheedPas encore d'évaluation
- GATE ECE 2006 Actual PaperDocument33 pagesGATE ECE 2006 Actual Paperkibrom atsbhaPas encore d'évaluation
- Jee Main Online Paper 2 Solutions 2015Document35 pagesJee Main Online Paper 2 Solutions 2015ASDFPas encore d'évaluation
- Unit4 1 80Document80 pagesUnit4 1 80Mukesh 2004Pas encore d'évaluation
- ECE Department ABES Engineering College GhaziabadDocument62 pagesECE Department ABES Engineering College GhaziabadAmit GargPas encore d'évaluation
- Ac BridgeDocument7 pagesAc BridgeAditiPas encore d'évaluation
- Ec 2004Document39 pagesEc 2004riuriuriuPas encore d'évaluation
- ECE 403 SOLUTIONSDocument4 pagesECE 403 SOLUTIONSEthan JanusPas encore d'évaluation
- Scan Jul 12, 2023 2023 July 12 19 15Document4 pagesScan Jul 12, 2023 2023 July 12 19 15Jee AdvPas encore d'évaluation
- HW 8Document4 pagesHW 8salimPas encore d'évaluation
- Ee Gate 2009Document38 pagesEe Gate 2009Angelika Amor AmororororoPas encore d'évaluation
- Solution Ee Set C 2018Document16 pagesSolution Ee Set C 2018Dharmender KumarPas encore d'évaluation
- 201703150740511Document5 pages201703150740511Hayam ItaniPas encore d'évaluation
- 12 Jee Major Test With AnsDocument3 pages12 Jee Major Test With Anssiddharth boharaPas encore d'évaluation
- (A A) (A A) (A A) V (2) (2) / - (A A A) - (A A A) - (2) / VDocument2 pages(A A) (A A) (A A) V (2) (2) / - (A A A) - (A A A) - (2) / VSimon SavittPas encore d'évaluation
- GATE ECE 2001 Actual PaperDocument27 pagesGATE ECE 2001 Actual Paperkibrom atsbhaPas encore d'évaluation
- Discrete AssignDocument16 pagesDiscrete AssignHaroon KhanPas encore d'évaluation
- Error Correcting Codes From General Linear Groups: Mahir Bilen CanDocument12 pagesError Correcting Codes From General Linear Groups: Mahir Bilen CanMd. Adnan NabibPas encore d'évaluation
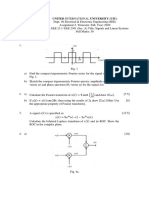
- UIU EEE Assignment 2 Signals and Linear SystemsDocument2 pagesUIU EEE Assignment 2 Signals and Linear SystemsFaizur Rahman PaponPas encore d'évaluation
- Tutorial 4Document4 pagesTutorial 4Bader Al-SabriPas encore d'évaluation
- 861 Physics - Isc SpecimenDocument17 pages861 Physics - Isc SpecimenadityaPas encore d'évaluation
- Review of Coordinate Systems and Vector Calculus ConceptsDocument17 pagesReview of Coordinate Systems and Vector Calculus ConceptsTarunVarmaPas encore d'évaluation
- State-Space Synthesis of Current-Mode First-Order Log-Domain FiltersDocument25 pagesState-Space Synthesis of Current-Mode First-Order Log-Domain FiltersRut danielaPas encore d'évaluation
- SRF Theory Control DSTATCOMsDocument2 pagesSRF Theory Control DSTATCOMsArvind SharmaPas encore d'évaluation
- Pre Cal Learner - S Packet Q1 Week 3Document11 pagesPre Cal Learner - S Packet Q1 Week 3Gladys Angela ValdemoroPas encore d'évaluation
- đại số đỉnhDocument5 pagesđại số đỉnhRin TohsakaPas encore d'évaluation
- Semi ConductorDocument4 pagesSemi ConductorSchrodinger's CatPas encore d'évaluation
- Circuit Theory - Solved Assignments - Spring 2005Document31 pagesCircuit Theory - Solved Assignments - Spring 2005Muhammad UmairPas encore d'évaluation
- AC Motor ProtectionDocument33 pagesAC Motor ProtectionLoretta KimPas encore d'évaluation
- Measurement of Zero Sequence Current Transmission LinesDocument23 pagesMeasurement of Zero Sequence Current Transmission Linesanoopeluvathingal100Pas encore d'évaluation
- OPT ChecklistDocument2 pagesOPT Checklistvinod kumar maddineniPas encore d'évaluation
- Project Engineer: Department: Reports ToDocument4 pagesProject Engineer: Department: Reports Tovinod kumar maddineniPas encore d'évaluation
- 6-PerformanceGenerator Finney & HaasDocument29 pages6-PerformanceGenerator Finney & Haasvinod kumar maddineniPas encore d'évaluation
- Three Phase Transformer Winding ConfigurationsDocument40 pagesThree Phase Transformer Winding ConfigurationsbudanaPas encore d'évaluation
- Isha Forest Flower Feb 2019Document24 pagesIsha Forest Flower Feb 2019Alejandro SanchezPas encore d'évaluation
- Graduate Student Employment Opportunities in CSEE: Graduate Assistantship (GA) (Graders)Document8 pagesGraduate Student Employment Opportunities in CSEE: Graduate Assistantship (GA) (Graders)vinod kumar maddineniPas encore d'évaluation
- Trip1 PDFDocument2 pagesTrip1 PDFvinod kumar maddineniPas encore d'évaluation
- 07A ELC4340 Spring13 TransformersDocument6 pages07A ELC4340 Spring13 TransformersThameemul BuhariPas encore d'évaluation
- Lab Manual Protection 1Document9 pagesLab Manual Protection 1Anonymous ZedO7aS4Pas encore d'évaluation
- Impact of X/R Ratio and Secondary Burden on CT Saturation AccuracyDocument3 pagesImpact of X/R Ratio and Secondary Burden on CT Saturation Accuracypulasta109Pas encore d'évaluation
- A Short Course On Synchronous Machines & Synchronous CondensersDocument113 pagesA Short Course On Synchronous Machines & Synchronous CondensersMazen Al-AArikyPas encore d'évaluation
- 04 BRABB - 04 - Communication Principles V1 PDFDocument11 pages04 BRABB - 04 - Communication Principles V1 PDFamruthkiranbabujiPas encore d'évaluation
- Xs 03Document6 pagesXs 03Mohamad FakhouryPas encore d'évaluation
- Isha Forest Flower Feb 2018Document24 pagesIsha Forest Flower Feb 2018Alejandro SanchezPas encore d'évaluation
- Treu PDFDocument1 pageTreu PDFvinod kumar maddineniPas encore d'évaluation
- Aux SystemDocument15 pagesAux Systemvinod kumar maddineniPas encore d'évaluation
- CT TestingDocument8 pagesCT TestingsankalptiwariPas encore d'évaluation
- Bode Plot and Block DiagramDocument11 pagesBode Plot and Block Diagramvinod kumar maddineniPas encore d'évaluation
- Um KC Libraries Supplemental Student Employment ApplicationDocument2 pagesUm KC Libraries Supplemental Student Employment Applicationvinod kumar maddineniPas encore d'évaluation
- Mechanisms of Heat TransferDocument30 pagesMechanisms of Heat Transfervinod kumar maddineniPas encore d'évaluation
- Document 2099Document9 pagesDocument 2099vinod kumar maddineniPas encore d'évaluation
- Unbalanced 3 PhaseDocument11 pagesUnbalanced 3 PhaseSherwin AgootPas encore d'évaluation
- Yaswanth Numburi 16222451Document6 pagesYaswanth Numburi 16222451vinod kumar maddineniPas encore d'évaluation
- 193 Sample-Chapter PDFDocument82 pages193 Sample-Chapter PDFAjwad Haziq100% (1)
- FINALDocument7 pagesFINALvinod kumar maddineniPas encore d'évaluation
- Chiller Starter (AMPGARD) - Medium Voltage: Technical Data TD02003003EDocument28 pagesChiller Starter (AMPGARD) - Medium Voltage: Technical Data TD02003003Edavidescobar071214Pas encore d'évaluation
- CC271 Februar 2013Document84 pagesCC271 Februar 2013JanPas encore d'évaluation
- Dsre - M 2016Document120 pagesDsre - M 2016Mohit KohliPas encore d'évaluation
- 8-Port Spectrum Analyzer with Carrier MonitoringDocument2 pages8-Port Spectrum Analyzer with Carrier MonitoringarzeszutPas encore d'évaluation
- LG Sound Bar ManualDocument40 pagesLG Sound Bar ManuallonghornstevePas encore d'évaluation
- Konica Minolta QMS Pagepro 9100 Service ManualDocument228 pagesKonica Minolta QMS Pagepro 9100 Service Manualingmar_sPas encore d'évaluation
- Motoman Mh5L: General Purpose and Handling With The MH-seriesDocument2 pagesMotoman Mh5L: General Purpose and Handling With The MH-seriesFrancisco HermidaPas encore d'évaluation
- Foundation EngineeringDocument31 pagesFoundation EngineeringkgiyerPas encore d'évaluation
- 8 - DPCM-Linear Prediction-DMDocument37 pages8 - DPCM-Linear Prediction-DMMichel Abou HaidarPas encore d'évaluation
- Amf 90XLi, XLi KlavuzuDocument232 pagesAmf 90XLi, XLi KlavuzuTaner ineviPas encore d'évaluation
- Inovance Md310 VFD Quick Guide English 20-4-20Document64 pagesInovance Md310 VFD Quick Guide English 20-4-20phu chuPas encore d'évaluation
- Week5 Lecture - 3D DesigningDocument14 pagesWeek5 Lecture - 3D DesigningPatrick MolePas encore d'évaluation
- DataSheet SLS510 LC en 091201Document4 pagesDataSheet SLS510 LC en 091201Nguyễn Văn SơnPas encore d'évaluation
- CMOS Interview QuestionsDocument3 pagesCMOS Interview QuestionsAjay G BellamPas encore d'évaluation
- Rk-Mcu HN-PTT - Master Control Unit Rk-McuDocument1 pageRk-Mcu HN-PTT - Master Control Unit Rk-McuCiprian BolovanPas encore d'évaluation
- 15.001-EN.2.0.20220426-Pro3 Series-User ManualDocument42 pages15.001-EN.2.0.20220426-Pro3 Series-User ManualBruno InuggiPas encore d'évaluation
- RF-Based Multiple Device Control Using MicrocontrollerDocument7 pagesRF-Based Multiple Device Control Using Microcontrollermv mvPas encore d'évaluation
- Lesson 6 PID Control of Heat Exchanger Temp PDFDocument2 pagesLesson 6 PID Control of Heat Exchanger Temp PDFJenny GoPas encore d'évaluation
- Introduction To ArpaDocument8 pagesIntroduction To ArpaHEIDI ROSE MENDOZAPas encore d'évaluation
- SMP PSDocument3 pagesSMP PSSreekanthMylavarapuPas encore d'évaluation
- Seaeye Tiger & Lynx: Observation and Inspection Class RovsDocument4 pagesSeaeye Tiger & Lynx: Observation and Inspection Class RovsPWkannonPas encore d'évaluation
- Preliminary Program ICHQP 2014 PDFDocument22 pagesPreliminary Program ICHQP 2014 PDFRadislav MilankovPas encore d'évaluation
- Certified Optical Network Training Programme GuideDocument2 pagesCertified Optical Network Training Programme Guiderikii80Pas encore d'évaluation
- Esser Katalog 2013 Voice EvacuationDocument100 pagesEsser Katalog 2013 Voice EvacuationsllazicPas encore d'évaluation
- Self Balancing Robot Using PidDocument21 pagesSelf Balancing Robot Using Pidline follower robotPas encore d'évaluation
- 524 Tutorial (7-24-13)Document73 pages524 Tutorial (7-24-13)Victor JimenezPas encore d'évaluation
- Lab 1: Study of Gates & Flip-Flops: - Digital IC Trainer KitDocument81 pagesLab 1: Study of Gates & Flip-Flops: - Digital IC Trainer KitforghanPas encore d'évaluation
- Sr90 StandardDocument26 pagesSr90 Standardflorin74Pas encore d'évaluation
- DDX4028BT DDX4058BT DDX3028 DDX3058: Installation ManualDocument8 pagesDDX4028BT DDX4058BT DDX3028 DDX3058: Installation ManualbojanmxPas encore d'évaluation
- 2.electical Line Protection Based On Circuit BreakerDocument3 pages2.electical Line Protection Based On Circuit BreakerdileeppatraPas encore d'évaluation