Vous aimerez peut-être aussi
- Multiscale Modeling of Composite Materials and Structures With ANSYSDocument12 pagesMultiscale Modeling of Composite Materials and Structures With ANSYSIhab El Sawi100% (1)
- Progressive Overload WorkoutDocument8 pagesProgressive Overload WorkoutArjit Goswami0% (1)
- Lab Report Heat of ReactionDocument8 pagesLab Report Heat of ReactionLera May BenavidezPas encore d'évaluation
- Heat TransferDocument131 pagesHeat Transferjohn babe jeszareth Capili100% (2)
- Rock Socketed PilesDocument7 pagesRock Socketed PilesMohamedRaahimPas encore d'évaluation
- Nanotribology of Mems/Nems: Shishir Kumar SinghDocument27 pagesNanotribology of Mems/Nems: Shishir Kumar SinghFaisal ShabirPas encore d'évaluation
- Microcraking in CompositesDocument10 pagesMicrocraking in CompositesPravinkumarGhodakePas encore d'évaluation
- Models - Rf.microstrip Patch Antenna Inset 2Document16 pagesModels - Rf.microstrip Patch Antenna Inset 2Farzin AbdolbaghiPas encore d'évaluation
- Composites Modeling Capabilities of AbaqusDocument13 pagesComposites Modeling Capabilities of AbaqusMo HoPas encore d'évaluation
- Posite TransducerDocument16 pagesPosite TransducerSyed Saim GardeziPas encore d'évaluation
- Numerical Study On Carbon Fibre Pullout Ising A Cohesive Zone ModelDocument6 pagesNumerical Study On Carbon Fibre Pullout Ising A Cohesive Zone ModelRabee ShammasPas encore d'évaluation
- Composites Science and Technology: T.J. Vaughan, C.T. MccarthyDocument7 pagesComposites Science and Technology: T.J. Vaughan, C.T. MccarthySmeriuPas encore d'évaluation
- Tutorial Antenna ADSDocument14 pagesTutorial Antenna ADSmariem abdiPas encore d'évaluation
- The Role of Structure On Mechanical Properties of Nonwoven FabricsDocument6 pagesThe Role of Structure On Mechanical Properties of Nonwoven Fabricsali sharifiPas encore d'évaluation
- Numetrical Study On Carbon Fibre Pullout Using A Cohesive Zone ModelDocument6 pagesNumetrical Study On Carbon Fibre Pullout Using A Cohesive Zone ModelPandi IitmPas encore d'évaluation
- Shahdin 2101Document10 pagesShahdin 2101Osvaldo SalvatorePas encore d'évaluation
- Linear and Nonlinear Particle Breakage Processes inDocument11 pagesLinear and Nonlinear Particle Breakage Processes inFrancisco CampbellPas encore d'évaluation
- Nagaraja PaperDocument5 pagesNagaraja PaperHasanPas encore d'évaluation
- 2004 Pina Lourenco1 PDFDocument18 pages2004 Pina Lourenco1 PDFKevin HuamaniPas encore d'évaluation
- Pena 2008-Application of The Natural Element Method To Finite Deformation Inelastic Problems in Isotropic and Fiber-Reinforced Biological Soft TissuesDocument14 pagesPena 2008-Application of The Natural Element Method To Finite Deformation Inelastic Problems in Isotropic and Fiber-Reinforced Biological Soft TissuesMinhao ZhouPas encore d'évaluation
- Significance of Low Energy Impact Damage On Modal Parameters of Composite Beams by Design of ExperimentsDocument10 pagesSignificance of Low Energy Impact Damage On Modal Parameters of Composite Beams by Design of ExperimentssandeepPas encore d'évaluation
- Acoustic Wave Crack Detection A First Principles ApproachDocument6 pagesAcoustic Wave Crack Detection A First Principles ApproachHridya LalPas encore d'évaluation
- "Fictitious Crack Mode, by Hillerborg 1976Document11 pages"Fictitious Crack Mode, by Hillerborg 1976Ali FadhilPas encore d'évaluation
- Som Lab Exp1Document6 pagesSom Lab Exp1Amisha SharonPas encore d'évaluation
- SOM Lab EXP1Document6 pagesSOM Lab EXP1Amisha SharonPas encore d'évaluation
- LAB 1 (TENSILE TEST) NA - 2021 (1) (PDF - Io)Document12 pagesLAB 1 (TENSILE TEST) NA - 2021 (1) (PDF - Io)muhdhaikalhakimiPas encore d'évaluation
- Equivalent Analysis of Honecomb PanelsDocument5 pagesEquivalent Analysis of Honecomb Panelsprateekg92Pas encore d'évaluation
- Iccste 205Document8 pagesIccste 205Htoo Myat AungPas encore d'évaluation
- Wave Optics Model Library ManualDocument322 pagesWave Optics Model Library ManualFernando SantosPas encore d'évaluation
- Models - Acdc.permanent MagnetDocument10 pagesModels - Acdc.permanent Magnetm_topic100% (1)
- Assignment 4Document7 pagesAssignment 4Mahmood Ul HasnainPas encore d'évaluation
- Xfem Modelling of Transverse Cracking in Fibre Reinforced CompositesDocument6 pagesXfem Modelling of Transverse Cracking in Fibre Reinforced CompositesDonfack BertrandPas encore d'évaluation
- Non-Destructive Evaluation of Sandwich Plates by An Ultrasonic IR Thermographic MethodDocument8 pagesNon-Destructive Evaluation of Sandwich Plates by An Ultrasonic IR Thermographic MethodSameerKhanPas encore d'évaluation
- Computing The Resistance of A Wire: Solved With COMSOL Multiphysics 4.3bDocument8 pagesComputing The Resistance of A Wire: Solved With COMSOL Multiphysics 4.3bMehmet MehmetPas encore d'évaluation
- Sheng2004 POWDER COMPACTIONDocument14 pagesSheng2004 POWDER COMPACTIONRAJARAM KUMAR GUPTAPas encore d'évaluation
- A Comparative Study of Composite Modelling Approaches Used For Thermo-Stamping ProcessDocument7 pagesA Comparative Study of Composite Modelling Approaches Used For Thermo-Stamping Processhalil yıldırımPas encore d'évaluation
- Analysis On Failure Mechanisms of An Interlock Woven FabricDocument9 pagesAnalysis On Failure Mechanisms of An Interlock Woven FabricTibebu MeridePas encore d'évaluation
- I. Problem DescriptionsDocument10 pagesI. Problem DescriptionsDinesh NadarajahPas encore d'évaluation
- Design and Analysis of FRPDocument4 pagesDesign and Analysis of FRPDanielPas encore d'évaluation
- 2018-SAoE-ABAQUS-XFEM To Study The Fracture of 3D Printed Polymers Considering Layer InterfacesDocument12 pages2018-SAoE-ABAQUS-XFEM To Study The Fracture of 3D Printed Polymers Considering Layer InterfacesVipin DasPas encore d'évaluation
- Biomechanical Study of Thai Femoral Bone Fracture With Gamma 3 Long Nail: Finite Element AnalysisDocument6 pagesBiomechanical Study of Thai Femoral Bone Fracture With Gamma 3 Long Nail: Finite Element AnalysisGuilherme EstevesPas encore d'évaluation
- Large Deformation of BeamsDocument19 pagesLarge Deformation of BeamsMuthair SaeedPas encore d'évaluation
- TensileDocument10 pagesTensilePatrick LauPas encore d'évaluation
- 3analytical PDFDocument13 pages3analytical PDFBALRAJPas encore d'évaluation
- Damage of Woven Composite Under Translaminar Cracking Tests Using Infrared ThermographyDocument22 pagesDamage of Woven Composite Under Translaminar Cracking Tests Using Infrared Thermographyusto2014Pas encore d'évaluation
- Effect of Mesh Size On Finite Element Analysis of Beam: December 2015Document4 pagesEffect of Mesh Size On Finite Element Analysis of Beam: December 2015AadhilPas encore d'évaluation
- Crusado InterpolationDocument13 pagesCrusado InterpolationgiovannidiazduranPas encore d'évaluation
- Vishwanat Kanal, Vinod Nirale, Ravindra Kondaguli: Impact Factor: 1.479Document4 pagesVishwanat Kanal, Vinod Nirale, Ravindra Kondaguli: Impact Factor: 1.479divjak70Pas encore d'évaluation
- Fracture Analysis of Concrete Literature Review - Nathan - MachiorlattiDocument13 pagesFracture Analysis of Concrete Literature Review - Nathan - MachiorlattiNathanPas encore d'évaluation
- Readme - Simulation of A Wood PileDocument3 pagesReadme - Simulation of A Wood PileArsalèn GatriPas encore d'évaluation
- Multi-Axial Fatigue Life Prediction of Bellow Expansion JointDocument8 pagesMulti-Axial Fatigue Life Prediction of Bellow Expansion JointedmondPas encore d'évaluation
- Çok Katmanli Kompansatör Anali̇zDocument5 pagesÇok Katmanli Kompansatör Anali̇zNayri AkbugaPas encore d'évaluation
- Shaft With Fillet: Solved With COMSOL Multiphysics 4.3aDocument16 pagesShaft With Fillet: Solved With COMSOL Multiphysics 4.3aPhượng NguyễnPas encore d'évaluation
- Effect of Mesh Size On Finite Element Analysis of Beam: Aman DuttDocument3 pagesEffect of Mesh Size On Finite Element Analysis of Beam: Aman Duttmember2 mtriPas encore d'évaluation
- Article 13Document7 pagesArticle 13sami Tub ftPas encore d'évaluation
- Thread Root RadiusDocument6 pagesThread Root RadiusVasile CojocaruPas encore d'évaluation
- Numerical Simulation of Cracking in Asphalt Concrete Through Continuum and Discrete Damage ModelDocument5 pagesNumerical Simulation of Cracking in Asphalt Concrete Through Continuum and Discrete Damage ModelIJRASETPublicationsPas encore d'évaluation
- Aiaa 2005 1954 226Document14 pagesAiaa 2005 1954 226Junghyun AhnPas encore d'évaluation
- Snap Hook: Created in COMSOL Multiphysics 5.4Document18 pagesSnap Hook: Created in COMSOL Multiphysics 5.4venalum90Pas encore d'évaluation
- Ijer 2014 306Document5 pagesIjer 2014 306Innovative Research PublicationsPas encore d'évaluation
- Damage of Ductile Materials Deforming Under Multiple Plastic or Viscoplastic MechanismsDocument18 pagesDamage of Ductile Materials Deforming Under Multiple Plastic or Viscoplastic MechanismsEngels OchoaPas encore d'évaluation
- Mohammad Rakibul Islam Khan, Zafrul Hakim Khan, Mohammad Fahim Raiyan and Khan Mahmud AmanatDocument14 pagesMohammad Rakibul Islam Khan, Zafrul Hakim Khan, Mohammad Fahim Raiyan and Khan Mahmud AmanatShoyeeb AhmedPas encore d'évaluation
- Thread Spacing Practical ReportDocument9 pagesThread Spacing Practical ReportAndrew ThomasPas encore d'évaluation
- Discrete Element Method to Model 3D Continuous MaterialsD'EverandDiscrete Element Method to Model 3D Continuous MaterialsPas encore d'évaluation
- TurbineDocument14 pagesTurbineArjit GoswamiPas encore d'évaluation
- PlanningDocument26 pagesPlanningArjit GoswamiPas encore d'évaluation
- Introduction To EconomicsDocument23 pagesIntroduction To EconomicsArjit GoswamiPas encore d'évaluation
- New Week 07 Sep20Document1 pageNew Week 07 Sep20Arjit GoswamiPas encore d'évaluation
- Round 2Document3 pagesRound 2Arjit GoswamiPas encore d'évaluation
- Workout Plan 2Document6 pagesWorkout Plan 2Arjit GoswamiPas encore d'évaluation
- Push Day RoutineDocument1 pagePush Day RoutineArjit GoswamiPas encore d'évaluation
- CV1691 Environmental Management: Reference BooksDocument18 pagesCV1691 Environmental Management: Reference BooksArjit GoswamiPas encore d'évaluation
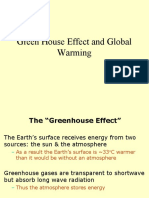
- LECTURE 5 - Green House Effect and Global WarmingDocument22 pagesLECTURE 5 - Green House Effect and Global WarmingArjit GoswamiPas encore d'évaluation
- Acid Rain: Acid Rain Is Basically Rain That Has A Higher Than Normal Acid Level (Low PH)Document36 pagesAcid Rain: Acid Rain Is Basically Rain That Has A Higher Than Normal Acid Level (Low PH)Arjit GoswamiPas encore d'évaluation
- Next Week Back ExerciseDocument1 pageNext Week Back ExerciseArjit GoswamiPas encore d'évaluation
- Air Cycle Refrigeration Systems (Indian Institute of Technology Kharagpur)Document15 pagesAir Cycle Refrigeration Systems (Indian Institute of Technology Kharagpur)emawz21Pas encore d'évaluation
- Ozone Depletion and EnvironmentDocument26 pagesOzone Depletion and EnvironmentArjit GoswamiPas encore d'évaluation
- Introduction To Mems EA C415: Dr. N.N. SharmaDocument14 pagesIntroduction To Mems EA C415: Dr. N.N. SharmaArjit GoswamiPas encore d'évaluation
- Introduction To Mems EA C415: Dr. N.N. SharmaDocument33 pagesIntroduction To Mems EA C415: Dr. N.N. SharmaArjit GoswamiPas encore d'évaluation
- Camd Lab Manual - Me - MujDocument73 pagesCamd Lab Manual - Me - MujArjit GoswamiPas encore d'évaluation
- RAC Chapter 3Document20 pagesRAC Chapter 3leepcPas encore d'évaluation
- Mechanical Engineering DepartmentDocument2 pagesMechanical Engineering DepartmentArjit Goswami100% (1)
- Introduction To Mems EA C415: Dr. N.N. SharmaDocument35 pagesIntroduction To Mems EA C415: Dr. N.N. SharmaArjit GoswamiPas encore d'évaluation
- Optical Properties PDFDocument27 pagesOptical Properties PDFaljhon100% (1)
- Nmems 2a PDFDocument51 pagesNmems 2a PDFArjit GoswamiPas encore d'évaluation
- Introduction To Mems EA C415: Dr. N.N. SharmaDocument16 pagesIntroduction To Mems EA C415: Dr. N.N. SharmaArjit GoswamiPas encore d'évaluation
- MTS 18 M PDFDocument10 pagesMTS 18 M PDFMettu Uday kiranPas encore d'évaluation
- MTS 05 M PDFDocument16 pagesMTS 05 M PDFRajarshiRoyPas encore d'évaluation
- Manipal University Jaipur: Department of Mechanical EngineeringDocument1 pageManipal University Jaipur: Department of Mechanical EngineeringArjit GoswamiPas encore d'évaluation
- Thermal PropertiesDocument14 pagesThermal PropertiesAanand Rishabh DagaPas encore d'évaluation
- U1 MAgneticPropDocument19 pagesU1 MAgneticPropAbinash PandaPas encore d'évaluation
- Imperfections in Solids: Module-3Document17 pagesImperfections in Solids: Module-3materialmindedPas encore d'évaluation
- Mechanical Properties of MetalsDocument25 pagesMechanical Properties of Metalsravijadav60Pas encore d'évaluation
- Zeroth Law of ThermodynamicspptDocument20 pagesZeroth Law of ThermodynamicspptCherry Mae Miranda VillabasPas encore d'évaluation
- CA3632.Assignment 1 Questions. 2017 PDFDocument5 pagesCA3632.Assignment 1 Questions. 2017 PDFwilson604Pas encore d'évaluation
- 2014 - 0010 Pumping For WaterDocument17 pages2014 - 0010 Pumping For WaterjaysonmalaaPas encore d'évaluation
- Homework #2 Due Feb 6, 2008 Spring Semester 2008: ME 363 - Fluid MechanicsDocument6 pagesHomework #2 Due Feb 6, 2008 Spring Semester 2008: ME 363 - Fluid MechanicsMohannad NassarPas encore d'évaluation
- Measurement of Creep Crack Growth Times in Metals: Standard Test Method ForDocument25 pagesMeasurement of Creep Crack Growth Times in Metals: Standard Test Method ForCristian DíazPas encore d'évaluation
- MECHANICAL ENGINEERING 2019 Scheme S4 Syllabus Ktustudents - inDocument91 pagesMECHANICAL ENGINEERING 2019 Scheme S4 Syllabus Ktustudents - inashnbPas encore d'évaluation
- Lab 1 - Compression of A Helical SpringDocument12 pagesLab 1 - Compression of A Helical SpringHaroon Rashidi75% (4)
- Water CoolerDocument37 pagesWater Coolerpramo_dassPas encore d'évaluation
- Applied Thermodynamics - Software Solutions PDFDocument206 pagesApplied Thermodynamics - Software Solutions PDFrikiPas encore d'évaluation
- Bridge Deck Behaviour, Second EditionDocument17 pagesBridge Deck Behaviour, Second EditionChrisYapPas encore d'évaluation
- Texture Profile AnalysisDocument7 pagesTexture Profile AnalysisMariel OliverPas encore d'évaluation
- 02 - ValvesDocument25 pages02 - ValvesRio Indoknivezia100% (1)
- WAVESDocument65 pagesWAVESArman Leal Bernardo100% (1)
- 321aquatech Heat Pump CatalogueDocument8 pages321aquatech Heat Pump CatalogueMohammad ZeeshanPas encore d'évaluation
- Trisha Banerjee at 2010Document7 pagesTrisha Banerjee at 2010Physics InstrumentsPas encore d'évaluation
- Vickery Watkins 1964 ScrutonNoDocument15 pagesVickery Watkins 1964 ScrutonNoFloydPas encore d'évaluation
- Pressure Relief SystemsDocument30 pagesPressure Relief SystemsBibek MerPas encore d'évaluation
- TripticoDocument2 pagesTripticoapi-294011342Pas encore d'évaluation
- Borrower SlipsDocument5 pagesBorrower SlipsGokuPas encore d'évaluation
- DLP in Educ 9Document6 pagesDLP in Educ 9Niño Morate CarletPas encore d'évaluation
- A Verification On Design Performance of 300MW Class CFB BoilerDocument39 pagesA Verification On Design Performance of 300MW Class CFB BoilerArvind ShuklaPas encore d'évaluation
- Relative Permeability Curves For Two-Phase Flows Through Heterogeneous Vuggy CarbonatesDocument7 pagesRelative Permeability Curves For Two-Phase Flows Through Heterogeneous Vuggy CarbonatesnadheePas encore d'évaluation
- Experiment To Verify Bernoulli's PrincipleDocument8 pagesExperiment To Verify Bernoulli's PrincipleKarishma JuttunPas encore d'évaluation
- AEEM-728 Introduction To Ultrasonics Lecture NotesDocument147 pagesAEEM-728 Introduction To Ultrasonics Lecture NotesSuprabh Shankaran100% (2)
- Vignesh (2015) - Reactor DesignDocument8 pagesVignesh (2015) - Reactor DesigngandurikPas encore d'évaluation
- NACA Technical Note 2440Document58 pagesNACA Technical Note 2440lufabaoPas encore d'évaluation