Vous aimerez peut-être aussi
- Guía para el análisis y solución de problemas de resistencia de materialesD'EverandGuía para el análisis y solución de problemas de resistencia de materialesPas encore d'évaluation
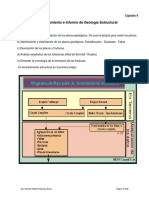
- Propiedades Químicas de Macizo RocosoDocument3 pagesPropiedades Químicas de Macizo RocosoYareli ArvizuPas encore d'évaluation
- Constitucion Interna Del Globo TerraqueoDocument2 pagesConstitucion Interna Del Globo TerraqueoalexisCS100% (2)
- Cuerpos IgneosDocument4 pagesCuerpos Igneossantiago_páez_1Pas encore d'évaluation
- Criterios de RoturaDocument8 pagesCriterios de RoturaCesar Quiroz VieraPas encore d'évaluation
- Tema 2.introduccion A Los Ambientes ÍgneosDocument19 pagesTema 2.introduccion A Los Ambientes ÍgneosCarlaSaavedraRomeroPas encore d'évaluation
- Deformación Homogénea y No HomogéneaDocument5 pagesDeformación Homogénea y No HomogéneaJesùs AlbertoPas encore d'évaluation
- Caracterizacion Del Matriz RocosaDocument17 pagesCaracterizacion Del Matriz RocosaWilfredo Lopez Monrroy100% (1)
- Factor de SeguridadDocument6 pagesFactor de SeguridadJhon Cruz AronacaPas encore d'évaluation
- Proyecto de Investigación de MineralogíaDocument6 pagesProyecto de Investigación de MineralogíaVlady Salazar100% (1)
- Principios de Mecanica de RocasDocument13 pagesPrincipios de Mecanica de Rocasyafeal0% (2)
- Criterios de Falla TeledetecciónDocument21 pagesCriterios de Falla TeledetecciónGustavo FlorianPas encore d'évaluation
- Problemas FMMCDocument199 pagesProblemas FMMCagustin zambranoPas encore d'évaluation
- Geologia Estructural-Ragan 4 EspañolDocument15 pagesGeologia Estructural-Ragan 4 EspañolLuigi Asto Vilcas100% (1)
- Cuenca Sedimentaria Azogues-CuencaDocument2 pagesCuenca Sedimentaria Azogues-CuencaNicolas AlejandroPas encore d'évaluation
- Estructuras Sedimentarias de DeformaciónDocument13 pagesEstructuras Sedimentarias de Deformacióndanilo zapata mogollonPas encore d'évaluation
- 1 Fundamentos 67Document67 pages1 Fundamentos 67davzuluetaPas encore d'évaluation
- EJEMPLOS DE APLICACIÓN DEL COKRIGING - PPTX FinDocument22 pagesEJEMPLOS DE APLICACIÓN DEL COKRIGING - PPTX FinMariapaz Alfaro Asencio100% (1)
- DIACLASASDocument61 pagesDIACLASASWilliams Nuñez Espetia100% (1)
- La Teoría de SkemptonDocument2 pagesLa Teoría de SkemptonSVGC870Pas encore d'évaluation
- 8a.rocas SedimentariasDocument59 pages8a.rocas SedimentariasRoberth ChalsgPas encore d'évaluation
- OFIOLITASDocument11 pagesOFIOLITASAlex SánchezPas encore d'évaluation
- Rotura Frágil de Las RocasDocument30 pagesRotura Frágil de Las RocasVictor Hugo100% (4)
- Genesis de Los PorfidosDocument2 pagesGenesis de Los PorfidosKelly RodríguezPas encore d'évaluation
- Unidad 4 TorsionDocument6 pagesUnidad 4 TorsionCarlos Macias AvilaPas encore d'évaluation
- Geología Estructural y DiscontinuidadesDocument13 pagesGeología Estructural y DiscontinuidadesPaulinaMp100% (3)
- Guia Geologia Estructural 2021-2Document125 pagesGuia Geologia Estructural 2021-2Soriano Larios Paola DenisePas encore d'évaluation
- Unidad 2 - 2.8 PROPIEDADES INDICE DE LAS ROCASDocument10 pagesUnidad 2 - 2.8 PROPIEDADES INDICE DE LAS ROCASmodestaPas encore d'évaluation
- Estructuras o Foliaciones PrimariasDocument16 pagesEstructuras o Foliaciones PrimariasYuridia Maryuri Cuevas PerezPas encore d'évaluation
- Esquema de Estructura Del SueloDocument1 pageEsquema de Estructura Del SueloCristianPas encore d'évaluation
- VentanaDocument7 pagesVentanaCordova Cruz David RubenPas encore d'évaluation
- Clasificación de Diaclasas y Fracturas de ExtensiónDocument6 pagesClasificación de Diaclasas y Fracturas de ExtensiónNataly Serrano100% (1)
- Yacimientos Asociados A MetamorfismoDocument66 pagesYacimientos Asociados A MetamorfismoDiego GalánPas encore d'évaluation
- La BonitaDocument3 pagesLa BonitaDavid0% (1)
- Depositos VolcanicosDocument4 pagesDepositos VolcanicosjonathanPas encore d'évaluation
- Aplicaciones de La Geotecnia en Ingeniería CivilDocument4 pagesAplicaciones de La Geotecnia en Ingeniería CivilGank SfkPas encore d'évaluation
- Geologia EstructuralDocument37 pagesGeologia EstructuralBoris Sebastian Aguila LopezPas encore d'évaluation
- Tensiones Efectivas Resumen de Mecanica de Suelos.Document3 pagesTensiones Efectivas Resumen de Mecanica de Suelos.Ríos ManuelPas encore d'évaluation
- Contactos GeologicosDocument1 pageContactos GeologicosOmar Paye AriPas encore d'évaluation
- Discontinuidades TerrestresDocument6 pagesDiscontinuidades TerrestresCristian CTPas encore d'évaluation
- Metamorfismo UHTDocument3 pagesMetamorfismo UHTHaroldRafaelPas encore d'évaluation
- Elipsoide de EsfuerzoDocument3 pagesElipsoide de EsfuerzoJuanPabloAriasPas encore d'évaluation
- BLOQUE 8 FallasDocument6 pagesBLOQUE 8 FallasJustin HerneyPas encore d'évaluation
- Propiedades Físicas y Mecánicas de Los Materiales RocososDocument48 pagesPropiedades Físicas y Mecánicas de Los Materiales RocososFabricio GualotuñaPas encore d'évaluation
- 8 Clase - Yacimientos Residuales PDFDocument12 pages8 Clase - Yacimientos Residuales PDFFrank Espinoza0% (1)
- Depositos SkarnDocument35 pagesDepositos SkarnDiego AquaPas encore d'évaluation
- Minerales Formadores de Rocas - Material PetroDocument15 pagesMinerales Formadores de Rocas - Material PetroJorge Rojas TorresPas encore d'évaluation
- 12 Reglas Primordiales de La FotogeologiaDocument4 pages12 Reglas Primordiales de La FotogeologiaAlan PeñaPas encore d'évaluation
- Mecanismos de RoturaDocument4 pagesMecanismos de RoturaCinthia GuerreroPas encore d'évaluation
- Clase 9 Levantamiento EstructuralDocument9 pagesClase 9 Levantamiento EstructuralIsco AlayoPas encore d'évaluation
- Bulones de Anclaje PuntualDocument5 pagesBulones de Anclaje PuntualEddy Nelson CAPas encore d'évaluation
- Elementos TrazadoresDocument9 pagesElementos TrazadoresYanethPaccoVelasquezPas encore d'évaluation
- Rocas MetamorficasDocument36 pagesRocas MetamorficasYuber Alex PanccaPas encore d'évaluation
- PDF Metodo Semiempirico de Terzaghi para El Calculo Del Empuje Contra Un Muro de Retencion - CompressDocument5 pagesPDF Metodo Semiempirico de Terzaghi para El Calculo Del Empuje Contra Un Muro de Retencion - CompressOskar JiménezPas encore d'évaluation
- Excavaciones Subterráneas en Roca Parte 2Document58 pagesExcavaciones Subterráneas en Roca Parte 2Luis EspinozaPas encore d'évaluation
- Practicas1 PDFDocument78 pagesPracticas1 PDFWILMER IVAN VILLALOBOS QUISPEPas encore d'évaluation
- Formación de Rocas Sedimentarias Quimico Inorgánicas y Quimico OrganicasDocument10 pagesFormación de Rocas Sedimentarias Quimico Inorgánicas y Quimico OrganicasJuanPas encore d'évaluation
- Tensor de EsfuerzosDocument7 pagesTensor de EsfuerzosAbraham OMPas encore d'évaluation
- Esfuerzos Combinados.Document27 pagesEsfuerzos Combinados.aridus-augustoPas encore d'évaluation
- Expo CiirculoDocument6 pagesExpo CiirculoNathalie BonifazPas encore d'évaluation
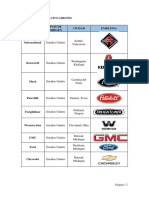
- Marcas de TractocamionesDocument6 pagesMarcas de TractocamionesJeffersonMartinezPas encore d'évaluation
- Altura Mínima de Loa Losa ACI 318Document3 pagesAltura Mínima de Loa Losa ACI 318JeffersonMartinezPas encore d'évaluation
- Disipadores de Energía Tipo Escalón Flujo RasanteDocument18 pagesDisipadores de Energía Tipo Escalón Flujo RasanteJeffersonMartinez100% (3)
- Delimitación de Una CuencaDocument7 pagesDelimitación de Una CuencaJeffersonMartinezPas encore d'évaluation
- RGHDocument10 pagesRGHJeffersonMartinezPas encore d'évaluation
- Problemas Serie Paralelo Mixto PDFDocument3 pagesProblemas Serie Paralelo Mixto PDFJeffersonMartinez100% (1)
- Estructura DispersaDocument1 pageEstructura DispersaJeffersonMartinezPas encore d'évaluation
- Clase 5 Curvas de Nivel-Abr-17Document14 pagesClase 5 Curvas de Nivel-Abr-17JeffersonMartinezPas encore d'évaluation
- ESTRICCIÓNDocument4 pagesESTRICCIÓNJeffersonMartinezPas encore d'évaluation
- La Columna Es Un Elemento Estructural Muy Utilizado en La ConstrucciónDocument9 pagesLa Columna Es Un Elemento Estructural Muy Utilizado en La ConstrucciónJeffersonMartinezPas encore d'évaluation
- La Mala ConstrucciónDocument2 pagesLa Mala ConstrucciónJeffersonMartinez0% (1)
- Coleccion de Ejemplos de RevistasDocument2 pagesColeccion de Ejemplos de RevistasJeffersonMartinezPas encore d'évaluation
- Monografias de La Carrera de Parvularia de Motricidad Gruesa en Niños de 2 AñosDocument5 pagesMonografias de La Carrera de Parvularia de Motricidad Gruesa en Niños de 2 AñosJeffersonMartinez25% (4)
- El Secado de La VacaDocument10 pagesEl Secado de La VacaMileydy del carmen Delgado lunaPas encore d'évaluation
- CAPÍTULO 11 - Bioenergética - La Función Del ATPDocument14 pagesCAPÍTULO 11 - Bioenergética - La Función Del ATPMartha A HervertPas encore d'évaluation
- Examenes HHADocument22 pagesExamenes HHAClaudia CaridePas encore d'évaluation
- Inpacto Del Capital Ingles en LambayequeDocument10 pagesInpacto Del Capital Ingles en LambayequeLuis Lizana BarreraPas encore d'évaluation
- Memoria Descriptiva de Adicional Deductivo N°01Document30 pagesMemoria Descriptiva de Adicional Deductivo N°01Susan Ñaupa Ricaldi100% (2)
- Microalgas y Cianobacterias en El Suelo - En.esDocument19 pagesMicroalgas y Cianobacterias en El Suelo - En.esZaida Lizbeth100% (1)
- Ficha Tecnica IONIFLASH MACH NG®Document2 pagesFicha Tecnica IONIFLASH MACH NG®Emilio CastroPas encore d'évaluation
- Aristóteles Padre de La Lógica OkDocument25 pagesAristóteles Padre de La Lógica OksoledadPas encore d'évaluation
- Catalogo de Partes Volvo FMX 6x4 2 PDFDocument620 pagesCatalogo de Partes Volvo FMX 6x4 2 PDFCristhian Gutierrez Tamayo83% (6)
- Doc-20240301-Wa0044 240303 090355Document28 pagesDoc-20240301-Wa0044 240303 090355daniahannahtalledoPas encore d'évaluation
- Distribucion de PlantasDocument15 pagesDistribucion de PlantasHENRY LOPEZPas encore d'évaluation
- TESIS AI175 - ZamDocument92 pagesTESIS AI175 - ZamDe La Cruz Vasquez JeffersonPas encore d'évaluation
- Sabana Humedas de PalmerasDocument12 pagesSabana Humedas de PalmerasErick Jonathan Hernadez RimapaPas encore d'évaluation
- DCPDocument30 pagesDCPkaty araujoPas encore d'évaluation
- Guía de ExodonciaDocument20 pagesGuía de ExodonciaAlliam AlliamPas encore d'évaluation
- Doc64 ContenidoDocument93 pagesDoc64 ContenidoLucia Del Carmen Aragon PinedaPas encore d'évaluation
- Puente y PotenciometroDocument3 pagesPuente y PotenciometroCarlos AndrésPas encore d'évaluation
- SHIMANO EBIKE ExploreNewGrounds Es ISSUU PDFDocument60 pagesSHIMANO EBIKE ExploreNewGrounds Es ISSUU PDFPaco LopezPas encore d'évaluation
- Potencia y Radicación de Fracciones 5ºDocument3 pagesPotencia y Radicación de Fracciones 5ºHERNAN LIZARVE ROMEROPas encore d'évaluation
- Obras MaritimasDocument44 pagesObras MaritimasMemo Hernandez Pares0% (1)
- Hernias EncefalicasDocument12 pagesHernias EncefalicasDavid De La RosaPas encore d'évaluation
- Simulacro Residentado Medico Parte B Con ClavesDocument8 pagesSimulacro Residentado Medico Parte B Con ClavesKellyMarTegraPas encore d'évaluation
- Calculo Tarea 2Document15 pagesCalculo Tarea 2Fanny PinedaPas encore d'évaluation
- Caso de Guardia 01.09.22Document71 pagesCaso de Guardia 01.09.22Javier Ariza De La HozPas encore d'évaluation
- Relleno Sanitario de TulumDocument37 pagesRelleno Sanitario de TulumRicaurte RicardoPas encore d'évaluation
- 1 El Proceso de La Investigación CientíficaDocument23 pages1 El Proceso de La Investigación CientíficaYeymi Sucely Coc BebPas encore d'évaluation
- Dextrosa AnhidraDocument3 pagesDextrosa AnhidraErick LópezPas encore d'évaluation
- Planilla de Control - Valor GanadoDocument11 pagesPlanilla de Control - Valor GanadoRicardo Miguel Samanamud AceroPas encore d'évaluation
- LIXIVIANCIONDocument72 pagesLIXIVIANCIONJulio Garcia Fuentes100% (1)
- Ejercicio de La Segunda Ley de NewtonDocument6 pagesEjercicio de La Segunda Ley de Newtoneduardohg20100% (1)