Vous aimerez peut-être aussi
- Revista Capeco - Precios Unitarios 2017Document160 pagesRevista Capeco - Precios Unitarios 2017Hugo Taipe FrancoPas encore d'évaluation
- Guia de Istalación de PecheraDocument11 pagesGuia de Istalación de PecheraOscar Patricio CaceresPas encore d'évaluation
- Neuroventas Nivel IDocument13 pagesNeuroventas Nivel IMarcos Delgadillo MoreiraPas encore d'évaluation
- Reporteec - Ficharuc - 20539285107 - Loceria y Cristaleria La Cusqueña SacDocument4 pagesReporteec - Ficharuc - 20539285107 - Loceria y Cristaleria La Cusqueña SacTherry Ayma SenciaPas encore d'évaluation
- Separadores de Contaminantes de Primeras LluviasDocument9 pagesSeparadores de Contaminantes de Primeras LluviasJoelPas encore d'évaluation
- 5-Modelo EOQ Con DescuentosDocument13 pages5-Modelo EOQ Con DescuentosAlejandro GómezPas encore d'évaluation
- Estudiar Ingenieria Industrial Virtual PensumDocument1 pageEstudiar Ingenieria Industrial Virtual PensumOrlandoPas encore d'évaluation
- FITOPLANCTONDocument11 pagesFITOPLANCTONCristian Basilik CasasPas encore d'évaluation
- Manual Del Usuario Modulare I EspañolDocument146 pagesManual Del Usuario Modulare I EspañolLuis Manuel Rodriguez MendozaPas encore d'évaluation
- Informe Final t3Document209 pagesInforme Final t3rosa elvira abanto albarranPas encore d'évaluation
- Sobre El Procedimiento Constructivo de Pilas de Cimentacion 0Document10 pagesSobre El Procedimiento Constructivo de Pilas de Cimentacion 0RobertoPas encore d'évaluation
- Proyecto de Grado - Implementación de Mesa para Mantenimiento de PCDocument29 pagesProyecto de Grado - Implementación de Mesa para Mantenimiento de PCHumberto Nieto GrandaPas encore d'évaluation
- Metrados para Obras de Edificacion en PinturaDocument3 pagesMetrados para Obras de Edificacion en PinturaJhonn Cañari HuayllaPas encore d'évaluation
- Copia de Descargos ReposicionDocument196 pagesCopia de Descargos ReposicionLeidy B BoyacaPas encore d'évaluation
- Como Burlar El Bloqueo CantvDocument15 pagesComo Burlar El Bloqueo Cantvdrw_21Pas encore d'évaluation
- GLACIAR Ingenier A S.A.S. - Cooling Towers - Torres de EnfriamientoDocument1 pageGLACIAR Ingenier A S.A.S. - Cooling Towers - Torres de EnfriamientoJuan Diego Suarez RiosPas encore d'évaluation
- Guía de Laboratorio Redes Opticas 02Document9 pagesGuía de Laboratorio Redes Opticas 02MAX FREDI QUISPE AGUILARPas encore d'évaluation
- UNEPARDocument9 pagesUNEPAROscar GarcíaPas encore d'évaluation
- Informe FinalDocument297 pagesInforme FinalBellaNavarroPas encore d'évaluation
- Conciliación Bancaria Conta Avanzada IDocument12 pagesConciliación Bancaria Conta Avanzada IAlexander MendozaPas encore d'évaluation
- Trabajo DimmerDocument10 pagesTrabajo DimmerJuan RivasPas encore d'évaluation
- Plantilla Del PaperDocument6 pagesPlantilla Del Paper44david100% (1)
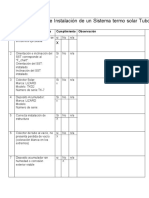
- Check List de Instalación de Un Sistema Termo Solar Tubo Al Vacío....Document6 pagesCheck List de Instalación de Un Sistema Termo Solar Tubo Al Vacío....Roberto GalleguillosPas encore d'évaluation
- Analisis Factibilidad Implementacion Tecnologia Proceso ElectoralDocument54 pagesAnalisis Factibilidad Implementacion Tecnologia Proceso ElectoralnuestrasvocesokPas encore d'évaluation
- SerpentónDocument4 pagesSerpentónJManuelTorresPas encore d'évaluation
- Diseño de Mezcas ACI 211.1Document31 pagesDiseño de Mezcas ACI 211.1Eduardo Fernández CoronadoPas encore d'évaluation
- Normalizacion c6...Document2 pagesNormalizacion c6...Brayan BeltranPas encore d'évaluation
- Costos ExpoDocument13 pagesCostos ExpoFABIAN LUIGI MENDOZA GUARDAPUCLLAPas encore d'évaluation
- Plan de Accion Iepec - Pec 2017 CompletoDocument3 pagesPlan de Accion Iepec - Pec 2017 CompletoEspejo Quiroga Vanessa100% (1)
- TipografíasDocument3 pagesTipografíasMarcelo Torres100% (1)