Vous aimerez peut-être aussi
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- CRT Television Troubleshooting Guide - Humphrey Kimathi NVDocument77 pagesCRT Television Troubleshooting Guide - Humphrey Kimathi NVRajesh100% (5)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Mueller Experiments Kromrey Brandt Tesla Bedini!!!!!Document30 pagesMueller Experiments Kromrey Brandt Tesla Bedini!!!!!d4nk4rPas encore d'évaluation
- KT-300 Installation Manual en DN1315-0707Document22 pagesKT-300 Installation Manual en DN1315-0707silviosergio2Pas encore d'évaluation
- Atkinson Mini TL HFN Nov78Document3 pagesAtkinson Mini TL HFN Nov78hugosmall50% (2)
- ANSI 50.00.01-1975 (R2002) - Compatibility of Analog Signals For Electronic Industrial Process InstrumentsDocument24 pagesANSI 50.00.01-1975 (R2002) - Compatibility of Analog Signals For Electronic Industrial Process InstrumentsKonsepsyon100% (1)
- TV Philco Pfs2980Document30 pagesTV Philco Pfs2980Mario Cesar RuizPas encore d'évaluation
- Online WuDocument1 pageOnline WukasehunPas encore d'évaluation
- Project Final - InoDocument2 pagesProject Final - InokasehunPas encore d'évaluation
- CodeDocument2 pagesCodekasehunPas encore d'évaluation
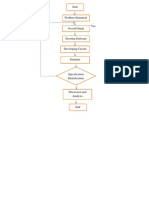
- MethodologyDocument1 pageMethodologykasehunPas encore d'évaluation
- CodeDocument2 pagesCodekasehunPas encore d'évaluation
- Fault (In Electric Power)Document19 pagesFault (In Electric Power)kasehunPas encore d'évaluation
- Transistor Amplifier Design ProcedureDocument4 pagesTransistor Amplifier Design ProcedurePravinkumar Subramanian100% (1)
- Sae j343 2010Document9 pagesSae j343 2010Danny ApontePas encore d'évaluation
- Soil Test Resistance MeterDocument11 pagesSoil Test Resistance Meterjames_frankPas encore d'évaluation
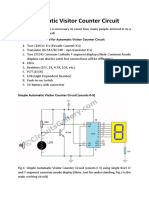
- Automatic Visitor Counter CircuitDocument4 pagesAutomatic Visitor Counter CircuithloPas encore d'évaluation
- RF Attenuator Basics and TutorialDocument14 pagesRF Attenuator Basics and TutorialciccioPas encore d'évaluation
- Phy12l A4 E306 2Q1516Document4 pagesPhy12l A4 E306 2Q1516Michelle Mae Gonzaga Raagas100% (1)
- Amplifier: Electronics & SoftwareDocument3 pagesAmplifier: Electronics & SoftwareJose M. RodriguezPas encore d'évaluation
- Ultimate Electronics: Practical Circuit Design and Analysis: Table of ContentsDocument3 pagesUltimate Electronics: Practical Circuit Design and Analysis: Table of ContentsPaulAlmond CitoCamba RegalaPas encore d'évaluation
- Experiment 3: Resistor Color CodingDocument3 pagesExperiment 3: Resistor Color CodingVictoria De GuzmanPas encore d'évaluation
- FR ABR H2 2k PDFDocument13 pagesFR ABR H2 2k PDFMárcio FernandesPas encore d'évaluation
- kdl26 32 40s2000Document79 pageskdl26 32 40s2000Dag Kjetil Hovland HansenPas encore d'évaluation
- FT 901modsDocument3 pagesFT 901modsMark WolstenholmePas encore d'évaluation
- Parasitic Inductance and Capacitance-Assisted Active Gate Driving Technique To Minimize Swithing Loss of Sic MOSFETDocument11 pagesParasitic Inductance and Capacitance-Assisted Active Gate Driving Technique To Minimize Swithing Loss of Sic MOSFETWesley de PaulaPas encore d'évaluation
- ABB E Clipse Bypass Users ManualDocument100 pagesABB E Clipse Bypass Users Manualkvramanan_1Pas encore d'évaluation
- Configuration Software AmeTrim User Manual US/ESPDocument68 pagesConfiguration Software AmeTrim User Manual US/ESPFernando Nava Rubio100% (1)
- Electra Quiz: Time - Marks - +3 (Correct), - 1 (Incorrect)Document3 pagesElectra Quiz: Time - Marks - +3 (Correct), - 1 (Incorrect)RohitRajPas encore d'évaluation
- AAA4000PE12Document15 pagesAAA4000PE12POTRAZOPas encore d'évaluation
- Iec 61010 2 031Document22 pagesIec 61010 2 031Rafael R QueirozPas encore d'évaluation
- THORN PAPI Lights Installation ManualDocument43 pagesTHORN PAPI Lights Installation ManualFarhan Shariff100% (1)
- Mile Kokotov - PSU 0-30V - 0-3ADocument12 pagesMile Kokotov - PSU 0-30V - 0-3ADikerson CarlosPas encore d'évaluation
- Is Now Part ofDocument19 pagesIs Now Part ofRonaldo De Castro RielingPas encore d'évaluation
- Ohm's LawDocument9 pagesOhm's Lawkare-kare CJPas encore d'évaluation
- Sharp 29mu70 Chassis C-BM D-BM SM PDFDocument28 pagesSharp 29mu70 Chassis C-BM D-BM SM PDFManuel Melara100% (1)
- An 6219 EvalDocument4 pagesAn 6219 EvalBeenish MirzaPas encore d'évaluation