Vous aimerez peut-être aussi
- Control automático aplicado: Prácticas de laboratorio 2da. EdiciónD'EverandControl automático aplicado: Prácticas de laboratorio 2da. EdiciónÉvaluation : 3.5 sur 5 étoiles3.5/5 (5)
- Sujetos Procesales Sistema Acusatorio AdversarialDocument12 pagesSujetos Procesales Sistema Acusatorio AdversarialJosé Luis Candela100% (1)
- Examen CAP R.araya - E.diaz - F.gonzales (1345)Document35 pagesExamen CAP R.araya - E.diaz - F.gonzales (1345)RAUL . ARAYA GUTIERREZPas encore d'évaluation
- Sintonizacion de ControladoresDocument25 pagesSintonizacion de ControladoresJuankSalazarPas encore d'évaluation
- Labview EjerciciosDocument19 pagesLabview EjerciciosjulpaiPas encore d'évaluation
- MacArthur. Medidas Comparativos Población ColombianaDocument14 pagesMacArthur. Medidas Comparativos Población ColombianaMilena GarciaPas encore d'évaluation
- Métodos de Sintonización de ControladoresDocument8 pagesMétodos de Sintonización de Controladoreskevintk15Pas encore d'évaluation
- Métodos Experimentales de Control PID (Ziengler-Nichols) - UQUILLAS - 2645Document9 pagesMétodos Experimentales de Control PID (Ziengler-Nichols) - UQUILLAS - 2645Maikol AlexanderPas encore d'évaluation
- Método de Ziegler-NicholsDocument4 pagesMétodo de Ziegler-NicholsDavid Iván Rosales Soto100% (1)
- Metodos de SintonizacionDocument11 pagesMetodos de SintonizacionJuanTaipePas encore d'évaluation
- Controladores PI, PD, PIDDocument32 pagesControladores PI, PD, PIDCristian García100% (2)
- Controlador PIDDocument9 pagesControlador PIDIsmael PeñaPas encore d'évaluation
- Mecatrónica: modelado, simulación y control de sistemas físicosD'EverandMecatrónica: modelado, simulación y control de sistemas físicosPas encore d'évaluation
- Control - Sintonia de Controladores PID Por Ziegler NicholsDocument12 pagesControl - Sintonia de Controladores PID Por Ziegler NicholsLuis Alberto SD100% (2)
- Controladores PID - Final.derivativoDocument21 pagesControladores PID - Final.derivativojhonnathanPas encore d'évaluation
- Sistema de Control Predictivo y CascadaDocument32 pagesSistema de Control Predictivo y CascadaGeraldine Burgos GonzalesPas encore d'évaluation
- Pid Ziegler NicholsDocument5 pagesPid Ziegler NicholsSebastian Felipe RodriguezPas encore d'évaluation
- s4 - Sistemas de 2do OrdenDocument40 pagess4 - Sistemas de 2do OrdenChristian Guzman Trillo100% (1)
- Compensadores en Atraso Usando El Método de RespuestaDocument15 pagesCompensadores en Atraso Usando El Método de RespuestaLuis RCPas encore d'évaluation
- Tipos de PLCDocument16 pagesTipos de PLCGerardo Apolinar ArellanoPas encore d'évaluation
- Sintonizacion Ziegler NicholsDocument21 pagesSintonizacion Ziegler NicholsMichael Esteban Boggiano Castillo100% (1)
- Controlador PIDDocument11 pagesControlador PIDWellintong Orlando SalanPas encore d'évaluation
- 3.3 Control ProporcionalDocument10 pages3.3 Control ProporcionalKevin mejiaPas encore d'évaluation
- Controladores PidDocument19 pagesControladores PidFelix Wf MongePas encore d'évaluation
- Configuración de Control PIDDocument26 pagesConfiguración de Control PIDBruno Eduardo Reyes BarralesPas encore d'évaluation
- Proyectos de LabviewDocument80 pagesProyectos de LabviewalexyaniPas encore d'évaluation
- Metodo Sintonizacion PIDDocument16 pagesMetodo Sintonizacion PIDJulio Antonio Guerrero CofrePas encore d'évaluation
- 7 Ejemplos GrafcetDocument4 pages7 Ejemplos GrafcetYael RiveroPas encore d'évaluation
- UNIDAD - 3 - CONTROL DE PROCESOS SESION - 6 - 2 - Sintonia - de - Controladores - Método de Ziegler Nichols - Curva - ReacciónDocument19 pagesUNIDAD - 3 - CONTROL DE PROCESOS SESION - 6 - 2 - Sintonia - de - Controladores - Método de Ziegler Nichols - Curva - ReacciónJhimmy Jhoel Crisostomo PomaPas encore d'évaluation
- Metodo de Cohen-Coon 2Document13 pagesMetodo de Cohen-Coon 2Josue Chris Redfield AvilaPas encore d'évaluation
- Metodo de Ziegler NicholsDocument7 pagesMetodo de Ziegler NicholsGermán Andrés Pulido CortésPas encore d'évaluation
- Métodos de Sintonización de ControladoresDocument12 pagesMétodos de Sintonización de ControladoresJosé Manuel CocolotlPas encore d'évaluation
- Láminas TATDocument13 pagesLáminas TATJulieta CastellaniPas encore d'évaluation
- Sintonización de Controladores PIDDocument14 pagesSintonización de Controladores PIDCésar Augusto González García100% (1)
- Controlador PidDocument4 pagesControlador PidBlas FigueroaPas encore d'évaluation
- Control DiscretoDocument47 pagesControl DiscretoCristobal Orlando Valenzuela RiosPas encore d'évaluation
- 7 Sintonización de Controladores IndustrialesDocument12 pages7 Sintonización de Controladores IndustrialesDiego Moreno BasmaPas encore d'évaluation
- Métodos de Sintonización en Lazo CerradoDocument12 pagesMétodos de Sintonización en Lazo CerradoloFreDDPas encore d'évaluation
- Predictor Smith TrabajoDocument9 pagesPredictor Smith TrabajoNicolas Bizama OrellanaPas encore d'évaluation
- Control Moderno y AvanzadoDocument40 pagesControl Moderno y AvanzadoFelipe FuentesPas encore d'évaluation
- Error en Estado Estacionario 1 PDFDocument8 pagesError en Estado Estacionario 1 PDFJhOel Osores VPas encore d'évaluation
- Práctica1 ProcesosDocument24 pagesPráctica1 ProcesosrambetsPas encore d'évaluation
- Practica 4Document4 pagesPractica 4Exovago Martinez50% (2)
- 1.1 Sensores y Actuadores en Instalaciones Industriales CorregidoDocument10 pages1.1 Sensores y Actuadores en Instalaciones Industriales CorregidoCesar AlemanPas encore d'évaluation
- Control ProporcionalDocument16 pagesControl ProporcionalKaren S.Pas encore d'évaluation
- Metodos de SintonizadoresDocument19 pagesMetodos de SintonizadoresAlan Darkness RapPas encore d'évaluation
- 7 Sintonizacion de Controladores PidDocument24 pages7 Sintonizacion de Controladores PiddavidPas encore d'évaluation
- Control PIDDocument6 pagesControl PIDMaykol AndresPas encore d'évaluation
- Files Descargas Siemens InfoPLC Net Guia4AUPG S7 200 GRAFCETDocument13 pagesFiles Descargas Siemens InfoPLC Net Guia4AUPG S7 200 GRAFCETanttonylordPas encore d'évaluation
- Sistemas de Control AutomaticoDocument74 pagesSistemas de Control Automaticoememsa100% (2)
- Cuestionario CONTROLADORESDocument5 pagesCuestionario CONTROLADORESAbezaid Gamez100% (1)
- Sistema de Control IDocument3 pagesSistema de Control ILuisCastroMantillaPas encore d'évaluation
- Control Por Ubicación de Polos, Sistema Ball and BeamDocument11 pagesControl Por Ubicación de Polos, Sistema Ball and BeamGregory Cárdenas-MansillaPas encore d'évaluation
- Ejemplo de ModelacionDocument36 pagesEjemplo de Modelacionaltamirano21Pas encore d'évaluation
- PID, Filtros Wash-Out y Anti Wind-UpDocument9 pagesPID, Filtros Wash-Out y Anti Wind-UpJose Jurado Hernandez0% (1)
- 12 Ajuste de Ganancias Del ControladorDocument32 pages12 Ajuste de Ganancias Del ControladorDaniel MartinezPas encore d'évaluation
- Proyecto PIDDocument16 pagesProyecto PIDLuis Israel Quinga AcostaPas encore d'évaluation
- Sintonizacion Coregido 1Document38 pagesSintonizacion Coregido 1joana ordoñez caballeroPas encore d'évaluation
- Binp U3 A1 SacjDocument6 pagesBinp U3 A1 SacjTuro ValadezPas encore d'évaluation
- SincronizacionDocument3 pagesSincronizacionAntonio Morales MontesPas encore d'évaluation
- PDF Unidad 3 Metodos de Sintonizacion de Controladores IndustrialesDocument31 pagesPDF Unidad 3 Metodos de Sintonizacion de Controladores Industrialesjoana ordoñez caballeroPas encore d'évaluation
- Unidad 5 Act 3Document12 pagesUnidad 5 Act 3Jorge Luis Hernandez VPas encore d'évaluation
- Métodos de Sintonización de Controladores PidDocument2 pagesMétodos de Sintonización de Controladores PidEdisson Santiago LascanoPas encore d'évaluation
- Trinomio Cuadrado Perfecto Por Adición y SustracciónDocument12 pagesTrinomio Cuadrado Perfecto Por Adición y Sustracciónalejandro soteloPas encore d'évaluation
- Clase 19 Con ClavesDocument42 pagesClase 19 Con ClavesMarco Malle MoraPas encore d'évaluation
- Ángel Palerm Historia de La Etnologia-Tylor y Los Profesionales Britanicos Lectura 1Document33 pagesÁngel Palerm Historia de La Etnologia-Tylor y Los Profesionales Britanicos Lectura 1marherreyPas encore d'évaluation
- Balanza Comercial Perú. CABRERADocument6 pagesBalanza Comercial Perú. CABRERAAntonio UpcPas encore d'évaluation
- Lineamientos Educativos Propuestos Por La Unesco PDFDocument6 pagesLineamientos Educativos Propuestos Por La Unesco PDFAntonietta Wettel0% (1)
- Teclado TelefónicoDocument7 pagesTeclado TelefónicoLizbeth DomínguezPas encore d'évaluation
- ColiriosDocument10 pagesColiriosManuel MartinezPas encore d'évaluation
- Bisquerra - Clasificación de Los Métodos de InvestigaciónDocument8 pagesBisquerra - Clasificación de Los Métodos de InvestigaciónSophie Del AngelPas encore d'évaluation
- Fundamento de La Dinámica de Los FluidosDocument8 pagesFundamento de La Dinámica de Los Fluidosjose gregorio hernandez marquezPas encore d'évaluation
- Inv MC Esco B E5Document74 pagesInv MC Esco B E5Rodrigo CoaritePas encore d'évaluation
- Hortalizas - Ii Capacidad TerminalDocument19 pagesHortalizas - Ii Capacidad Terminalkaterin quispe yauriPas encore d'évaluation
- La Familia Generadora de Salud y EnfermedadDocument7 pagesLa Familia Generadora de Salud y EnfermedadKatiuska LaraPas encore d'évaluation
- P.S. 012-Pva-Ralli-2023Document8 pagesP.S. 012-Pva-Ralli-2023Alexander SilvaPas encore d'évaluation
- Manual de Pruebas Psicométricas ActualDocument5 pagesManual de Pruebas Psicométricas ActualAna ValientePas encore d'évaluation
- Investigación Sobre Administración de ProyectosDocument8 pagesInvestigación Sobre Administración de ProyectosAldair Cruz BautistaPas encore d'évaluation
- (Spa) X14dvbeuh 1.116 1013Document240 pages(Spa) X14dvbeuh 1.116 1013PacoPas encore d'évaluation
- 08 Morseteria 230911Document18 pages08 Morseteria 230911Luis Francisco Calderon EspinozaPas encore d'évaluation
- Simbolos Industriales Usados en Ingeniería QuímicaDocument24 pagesSimbolos Industriales Usados en Ingeniería QuímicaDaniel ReyesPas encore d'évaluation
- La Perestroika Libro (Resumen)Document15 pagesLa Perestroika Libro (Resumen)Mishel BianPas encore d'évaluation
- Aptitud AcadémicaDocument30 pagesAptitud AcadémicabelliytPas encore d'évaluation
- Acerca de ASISDocument5 pagesAcerca de ASISCáRdenas Morales GuadalupePas encore d'évaluation
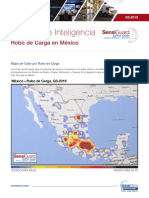
- Cargo Theft MX - Q3 2018 SPDocument5 pagesCargo Theft MX - Q3 2018 SPlezaa23100% (1)
- Examen Parcial - Semana 4 Evaluacion de ProyectosDocument13 pagesExamen Parcial - Semana 4 Evaluacion de ProyectosPia ArangoPas encore d'évaluation
- BIOMICROSDocument15 pagesBIOMICROSJhoanna Acuña Botiquin100% (1)
- Kimberly ClarkDocument1 pageKimberly ClarkAbigael AcostaPas encore d'évaluation
- Guía 4 Español SéptimoDocument2 pagesGuía 4 Español Séptimoalexnei12Pas encore d'évaluation
- Teoria 10-Fenómenos Térmicos y TermodinámicaDocument23 pagesTeoria 10-Fenómenos Térmicos y Termodinámicaxa asadPas encore d'évaluation