Vous aimerez peut-être aussi
- Función SI anidado bonificación edad distrito empleadosDocument7 pagesFunción SI anidado bonificación edad distrito empleadosjhonbien150% (2)
- EB12104 Practica de Funciones Lógicas Y ODocument8 pagesEB12104 Practica de Funciones Lógicas Y ODiego FrisanchoPas encore d'évaluation
- EB12102 Práctica de Uso de Funciones LógicasDocument7 pagesEB12102 Práctica de Uso de Funciones LógicasDiego FrisanchoPas encore d'évaluation
- Contrato GuidoDocument4 pagesContrato GuidoDiego FrisanchoPas encore d'évaluation
- Central Hidroelectrica Charcani VDocument8 pagesCentral Hidroelectrica Charcani VJoel Machaca G100% (8)
- Clase Funciones Fecha HoraDocument15 pagesClase Funciones Fecha HoraDiego FrisanchoPas encore d'évaluation
- EB12101 Uso de Funciones LógicasDocument8 pagesEB12101 Uso de Funciones LógicasDiego FrisanchoPas encore d'évaluation
- MilonnnDocument1 pageMilonnnDiego FrisanchoPas encore d'évaluation
- Matematica Impacto AmbientalDocument9 pagesMatematica Impacto AmbientalDiego FrisanchoPas encore d'évaluation
- Tuberias de SucciónDocument2 pagesTuberias de SucciónDiego FrisanchoPas encore d'évaluation
- CampoMagnéticoEspiraySolenoideDocument7 pagesCampoMagnéticoEspiraySolenoideDiego FrisanchoPas encore d'évaluation
- Instalacion Arranque e Inversion de Marcha Del Motor Asincrono Trifasico Con ContactoresDocument9 pagesInstalacion Arranque e Inversion de Marcha Del Motor Asincrono Trifasico Con ContactoresDiego FrisanchoPas encore d'évaluation
- Planta Satelite de Regasificacion - Ing de SuministrosDocument1 pagePlanta Satelite de Regasificacion - Ing de SuministrosDiego FrisanchoPas encore d'évaluation
- Cargas Termicas de AuditoriosDocument21 pagesCargas Termicas de AuditoriosDiego FrisanchoPas encore d'évaluation
- Principio de Funcionamiento de Una Central HidroelectricaDocument2 pagesPrincipio de Funcionamiento de Una Central HidroelectricaNeider Rivera HerreraPas encore d'évaluation
- Balotario Completo ExamDocument8 pagesBalotario Completo ExamDiego FrisanchoPas encore d'évaluation
- Ampliación de LT Challapampa - Cono Norte y SET Cono Norte PDFDocument62 pagesAmpliación de LT Challapampa - Cono Norte y SET Cono Norte PDFDiego FrisanchoPas encore d'évaluation
- Planos Aire Acondicionado AuditorioDocument6 pagesPlanos Aire Acondicionado AuditorioDiego Frisancho100% (2)
- Examen Proyecto Electrico Fase 2 2018Document6 pagesExamen Proyecto Electrico Fase 2 2018Diego FrisanchoPas encore d'évaluation
- Planos de Packing de Cuyes ENDDocument1 pagePlanos de Packing de Cuyes ENDDiego FrisanchoPas encore d'évaluation
- Capstone EspañolDocument26 pagesCapstone EspañolDiego FrisanchoPas encore d'évaluation
- Diseño de Ductos Aire AcondicionadoDocument3 pagesDiseño de Ductos Aire AcondicionadoDiego FrisanchoPas encore d'évaluation
- TDI Proyecto ElectricoDocument13 pagesTDI Proyecto ElectricoDiego FrisanchoPas encore d'évaluation
- Examen Proyecto Electrico Fase 2 2018Document6 pagesExamen Proyecto Electrico Fase 2 2018Diego FrisanchoPas encore d'évaluation
- Grupo N09 - Preguntas de Pruebas y Ensayos Realizados en Máquinas SíncronasDocument2 pagesGrupo N09 - Preguntas de Pruebas y Ensayos Realizados en Máquinas SíncronasDiego FrisanchoPas encore d'évaluation
- Grafica CentraesDocument1 pageGrafica CentraesDiego FrisanchoPas encore d'évaluation
- Balotario Completo ExamDocument8 pagesBalotario Completo ExamDiego FrisanchoPas encore d'évaluation
- Curva de Bombas en Paralelo y Curva de HomologacionDocument2 pagesCurva de Bombas en Paralelo y Curva de HomologacionDiego FrisanchoPas encore d'évaluation
- Balorario Grupo 8Document3 pagesBalorario Grupo 8Diego FrisanchoPas encore d'évaluation
- Cap 1 Sistemas de Costeo - IntrodDocument37 pagesCap 1 Sistemas de Costeo - IntrodMauricio AguilarPas encore d'évaluation
- Sistema de Evacuacion Calculo de AforoDocument7 pagesSistema de Evacuacion Calculo de AforoDerekZelayaDiazPas encore d'évaluation
- ProyeccionDocument2 pagesProyeccionGrecia CruzPas encore d'évaluation
- Ejercicios de Embutido Profundo de LáminasDocument1 pageEjercicios de Embutido Profundo de LáminasDiego Allendes67% (3)
- Bobinado MotoresDocument9 pagesBobinado MotoresEdwin MarianoPas encore d'évaluation
- LixiviaciónDocument67 pagesLixiviaciónjhonnyPas encore d'évaluation
- Fases Del Desarrollo Organizacional y Modelos de Cambios Planeado en La OrganizaciónDocument12 pagesFases Del Desarrollo Organizacional y Modelos de Cambios Planeado en La OrganizaciónEdwin Garcia100% (1)
- Presentaciones-De-Clase 2.3 Incidencia Sobre Multiples Interfaces-82649747Document20 pagesPresentaciones-De-Clase 2.3 Incidencia Sobre Multiples Interfaces-82649747Rosalina BejaranoPas encore d'évaluation
- Iop2 Teoria de ColasDocument22 pagesIop2 Teoria de ColasKathya EscalantePas encore d'évaluation
- CalorimetriaDocument2 pagesCalorimetriaLuis Miguel VillarealPas encore d'évaluation
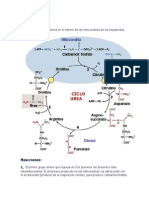
- Ciclo de La UreaDocument5 pagesCiclo de La UreaMartinezHuertaMaryPas encore d'évaluation
- Movimiento parabólico y balística: cálculos de trayectorias y fuerzasDocument24 pagesMovimiento parabólico y balística: cálculos de trayectorias y fuerzasCarlos A. Diaz0% (1)
- 4E Brochure Aire AcondicionadoDocument3 pages4E Brochure Aire AcondicionadoTEODOROPas encore d'évaluation
- Clase de ForjaDocument3 pagesClase de ForjaLeonardo EspinPas encore d'évaluation
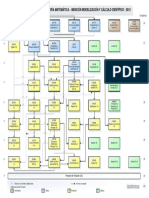
- Malla Curricular Ing Matematica Mencion Modelizacion PDFDocument1 pageMalla Curricular Ing Matematica Mencion Modelizacion PDFbartolome777ooPas encore d'évaluation
- Laboratorio de Fisica IiDocument12 pagesLaboratorio de Fisica Iihernan osorioPas encore d'évaluation
- Anomalia GravitatoriaDocument4 pagesAnomalia GravitatoriaSindi Sindy Bermudez HuillcaPas encore d'évaluation
- Funciones y sus propiedadesDocument19 pagesFunciones y sus propiedadesyo100% (3)
- Ajuste DuplexoresDocument11 pagesAjuste DuplexoresLuis RangelPas encore d'évaluation
- Tarea 4 - Trabajo ColaborativoDocument17 pagesTarea 4 - Trabajo ColaborativoJEISSON FERNANDO NIÑO IZAQUITAPas encore d'évaluation
- Informe Final de Laboratorio de Agregados-1Document20 pagesInforme Final de Laboratorio de Agregados-1HTB videos youtubePas encore d'évaluation
- Química - Enlace Químico, Iónico y CovalenteDocument1 pageQuímica - Enlace Químico, Iónico y CovalenteLuisana Isabel DorantePas encore d'évaluation
- Armadura 3Document21 pagesArmadura 3Mario Javier Zambrana MuñozPas encore d'évaluation
- Test - Repaso Seguridad Vial Pfv1-2017Document2 pagesTest - Repaso Seguridad Vial Pfv1-2017arisoft_67% (3)
- Fluorescencia de Rayos XDocument4 pagesFluorescencia de Rayos XAna Emily PrentissPas encore d'évaluation
- Reclutamiento Y Selección de La Fuerza de VentasDocument6 pagesReclutamiento Y Selección de La Fuerza de VentasJulian Garcia PerezPas encore d'évaluation
- Practico 3 - 2012Document14 pagesPractico 3 - 2012sandra_muñoz_15Pas encore d'évaluation
- Matemáticas DiscretasDocument3 pagesMatemáticas DiscretasNicolas CardenasPas encore d'évaluation
- CLASE 01 - Adhesion y Sistemas AdhesivosDocument15 pagesCLASE 01 - Adhesion y Sistemas AdhesivosLiliana Miranda A100% (1)
- Bioprogramación Hacia El ÉxitoDocument133 pagesBioprogramación Hacia El ÉxitoCésar FriendPas encore d'évaluation