Volume 3, Issue 4, April – 2018 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
DC Motor Driven Electric Skateboard using PWM
Th. Ankit Singh Anamika Ranjan Jatin Singh
Department of Electrical and Electronics Engineering, SRM Institute of Science and Technology, Chennai.
Abstract:- Several problems are faced by today’s succession of switch on and switch off steps, the motor
generation. One of them is the increase in pollution in speed is modulated. For this, paper we use PWM
everyday life. We want it reduced by using some eco- methodology thus it switches the motor on and off with a
friendly way like cycles which requires mechanical force. pulse wave. The motor voltage and revolutions per minutes
Another way to accomplish this is by using electricity to (RPM) obtained at completely different duty cycle rates.
produce this force i.e. electric motors. This is where the Because the duty cycle will increase, additional voltage is
concept of electric skateboard steps in. Using PWM to applied to the motor. This contributes to the stronger
control the motor and connecting the motor with a magnetic flux within the coil windings and also the
skateboard.PWM circuit is used and improvised increases the revolutions per minute. The characteristics and
according to our own needs for higher voltage. Along performance of the DC motor speed system was studied.
with these the basic concept of skateboard parts is
studied and manipulated to our needs so as to attach a
motor to it. The skateboard is fabricated by keeping in II. PULSE WIDTH MODULATION
mind the roads of India so that it can run on rough
terrain, not only on well-developed roads.
Keywords:- Pulse Width Modulation, DC Motor, 555 Timer,
Electric Skateboard.
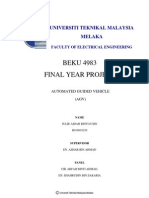
I. INTRODUCTION
Pulse Width Modulation is a technique of
modulation of the digital pulses. This method is used for
controlling the power supply to any device. This is achieved Fig 1:- Pulse Width Modulation
by changing the width of the pulses. The ON and OFF time
of the circuit is changed accordingly. The on and off time Pulse width modulation speed control works by driving the
control the output voltage and thus help in controlling the motor with a series of “ON-OFF” pulses. By varying the
connected device. This method of output voltage control is duty cycle, the fraction of time that the output voltage is
used being used to change the speed of the DC motor for “ON” compared to when it is “OFF”, of the pulses while
this project. keeping the frequency constant.
The time period for which a device conducts is This value of ON and OFF time can be
called as the ON time of the device. Similarly, the time manipulated as per the requirements. PWM is done by using
period when the device does not conduct is called the OFF electronic switches (transistors) which gives the following
period. The ratio of this on time to the total time period (on advantages:
time+ off time) is called as the Duty Ratio. In our project,
we attempt to change this duty ratio of the PWM circuit and
The power loss in the switching transistor is small
feed it to the motor. The change in duty cycle operates the
because the transistor is either fully “ON” or fully
turning on and off of the motor. This, thereby increases and
“OFF”. The transistor does not have an intermediate
decreases the speed of the motor. The switching
state.
characteristics is performed with the help of a potentiometer
whose resistance value is changed. With increase in Amplitude of the motor voltage remains constant so the
resistance, the speed decreases and with decrease in motor is always at full strength. The result is that the
resistance, the speed increases. This potentiometer acts as a motor can be rotated much more slowly without it
throttle for the electric skateboard. stalling.
PWM technique is a preferred speedcontrol The 555 timer is an IC which is used in a timers,
techniques for a DC motor. A high frequency chopper signal pulse generation, and oscillations. They are used to provide
with specific duty cycle is increased by switch signals. time delays, as an oscillator, and as a flip-flop element.
When the power supply is on, the DC motor starts
gaining speed and if we turn off the power supply before it III. BLOCK DIAGRAM
reaches at rated speed, and its speed decreases. In fast
IJISRT18AP495 www.ijisrt.com 348
Volume 3, Issue 4, April – 2018 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
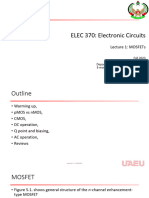
charge the capacitor so the off period will increase and if we
decrease the capacitance the off period will reduce. Second
method is to use a resistor in series with the capacitor.
If the resistance is more during charging then it will
take more time to charge so more off time and if it’s less
during charging then it will take less time to charge so less
off time. Similarly, if the during discharging if resistance is
more then on time will be more and if it’s less then lesser on
time. Manipulating this method, we can change the on and
off time so in turn changing the speed accordingly.
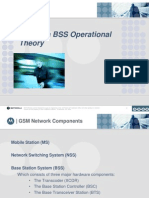
Fig 2:- Block Diagram
IV. EXPLANATION OF BLOCK DIAGRAM In the circuit, we have used a potentiometer to
apply the second method. So during charging the current is
through D1 and during discharge it’s from D2. Turning the
A 24 volt DC battery supplies power to the PWM
potentiometer, we can change the resistance during charging
speed control circuit. The speed controller circuit receives
and discharging therefor controlling the speed.
input resistance from the throttle which modulates the pulse
width. The output of this Pulse Width Modulation circuit is
fed to a DC motor. The voltage changes caused by the PWM Additional two more components are used which
circuit in turn alters the speed of the DC motor. are 12v Zener diode and 270ohm resistor. 12v Zener diode
is to protect the IC from high voltage.
The change in level of voltage is decided by a user
or rider through throttle connected to the circuit.
VI. FREQUENCY CALCULATION
The level of voltage is directly proportional to the
motor speed, i.e., with increase in the voltage, the speed o
The potentiometer is 100Kohm which can be
the motor increases and vice versa.
divided in two parts
R= 100k = Ra + Rb
The dc motor is connected to the chain and wheel
Ra is the resistance during charging of capacitor
assembly through a sprocket chain system and a subsequent
through D1 diode and Rb is the resistance during
mechanical braking system to stop the motor all together.
discharging of capacitor through D2 diode.
V. CIRCUIT DIAGRAM
(Time period) T= Tc + Td
Tc is charging time from 1/3Vcc to 2/3Vcc and Td
is discharging time from 2/3Vcc to 1/3Vcc
Tc=0.69*Ra*C
Td=0.69*Rb*C
(Frequency) F=1/T
=1/(Tc+Td)
=1/0.69(Ra+Rb) C
=1.45/(Ra+Rb)C
=1.45/(100Kohm)100nF
=145Hz
VII. DC MOTOR
A. Friction Calculation
Taking total weigh as 80kg
Fig 3:- Circuit Diagram
M is static friction coefficient
G is gravitational acceleration
The control of this on and off period causes change
F= m*g*m
in the waveform’s width. If period of being on is greater
=80*9.8*0.6
than period of being off the speed increases and vis versa.
=470.4N
Now for each wheel
There are two methods to change the on and the off
period. One is changing the capacitance of the capacitor i.e.
F/4=118(approx.)
if we increase the capacitance then it will take more time to
IJISRT18AP495 www.ijisrt.com 349
Volume 3, Issue 4, April – 2018 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
So, torque will be Springs are mounted between the hanger and the axle
housing on each truck to provide resistance to the lean of the
rider during turning. Springs are there to return the deck to
T=118*(radius of wheel in meter) initial state after a turn has been performed.
=118*0.1016=12Nm
VIII. RESULTS AND DISCUSSION
From this we can conclude that we need more than 12Nm
torque to move the object.
Also gear ratio will also determine how much torque will be
given out from a particular motor.
So, taking care of the radius of the wheel we will take a
sprocket with radius less then, the wheel radius, therefore
assuming a 33T sprocket having radius 0.066m. Having 11T
on motor.
So, gear ratio will be:
GR (gear ratio) =33T/11T=3
We know that motor torque should such that wheel A. Pulse Width Modulation With Change In Voltage
torque is more than 12Nm therefore, As shown in the above graph, with the duration of
the o time, the speed of the motor increases towards its rated
voltage. As soon as the off period starts, the speed of the
Torque on wheel> (3*motor torque) motor starts decreasing till the switch turns on again and the
on period begins.
This concludes the need of a motor with stalling
B. Software Simulation
torque greater than 4Nm i.e. either 5Nm or more.
After some search for motors of required
specification, a 250w 24V dc motor with 5Nm stalling
torque was decided to be implemented.
A. Battery
Two 1500mAh 3S 30C (11.1 v) Lithium Polymer
Battery Pack (LiPo) is attached in series to provide
22.2Volt.
B. Specifications Fig 4:- Software Simulation
3s; 30c; 1500mAh
C. Trucks
Trucks are mechanical part of skate boards to give
directions. Channel trucks design is used. These metal parts
are made up of an axle mounted to the bottom piece of the
truck.
They are mounted to the deck using nuts and bolts,
on an angle, (usually 45°).
When the board is tilted laterally the axles turn
together to angle the wheels in the direction of the turn.
With this mechanism in place, the skateboard axles will
angle itself such that on any turn, the skateboard will not
overturn and will always stay parallel to the ground.
a.
IJISRT18AP495 www.ijisrt.com 350
Volume 3, Issue 4, April – 2018 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
b.
f.
c.
Hardware
d.
g.
e.
IJISRT18AP495 www.ijisrt.com 351
Volume 3, Issue 4, April – 2018 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
[6]. DC Motor Speed Control Using PWM 306.68 KB
.Priyanka,A.Mariyammal
https://learn.sparkfun.com/tutorials/pulse-width-
modulationhttps://www.techopedia.com/definition/9034
/pulse-width-modulation-pwm.
[7]. Bhimbra, P.S., Power Electroics Principles, Second
Edition McGraw-Hill, 1992.
[8]. Wikipedia Effect of pulse width modulation on dc
motor speed. Cosmas Tatenda Katsambe ,Vinukumar
Luckose, Nurul Shahrizan Shahabuddin
[9]. PWM Based Speed Control for a DC Motor. PJ Patel,
HJ Patel, AD Unadkat, CU Patel, AP Sanjay - ijsetr.org
h.
IX. CONCLUSION
The speed of the DC motor was controlled by
PWM circuit with a 555 timer. The simulated model of the
skateboard was made and studied. The speed is successfully
controlled by a potentiometer which changes the duty ratio
of the circuit. The given circuit proves to be efficient as
PWM results in very low loss of power due to the use of
transistors and less voltage drop across itself. The motor
voltage and revolutions per minutes (RPM) obtained at
completely different duty cycle rates. Because the duty cycle
will increase, additional voltage is applied to the motor. This
contributes to the stronger magnetic flux within the coil
windings and also the increases the revolutions per minute.
The characteristics and performance of the DC motor speed
system was studied. The skateboard is constructed out of
wood and the metal parts for the truck system. The truck
system, regulates the turning of the board. The wheels used
are chosen according to Indian roads and will be able to
move on off-roads and is highly cost efficient as compared
to mountain boards.
REFERENCES
[1]. Speed Control of DC Motor by using PWM” Khan
Masoom Raza1, Mohd. Kamil1, Pushpendra Kumar1
Electrical Engg Department, MIT Moradabad1.
[2]. PWM Speed Control DC Motor Drive Power Design
zhenyixu yukang https://www.electronics-
tutorials.ws/blog/pulse-width-modulation.html.
[3]. https://electronicsforu.com/resources/learn-
electronics/555-timer-working-specifications.
[4]. Speed Control of BLDC Motor using PWM Technique.
Rajesh M Pindoriya, Indian Institute of Technology
Mandi, S Rajendran. Priyesh Chauhan. National
University of Singapore.
[5]. Speed Control of DC Motor. ĽubicaMiková, Ivan
Virgala1, Michal Kelemen 1
IJISRT18AP495 www.ijisrt.com 352
Vous aimerez peut-être aussi
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1D'EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Évaluation : 2.5 sur 5 étoiles2.5/5 (3)
- Understanding Vector Group of Transformer (Part 2) - EEPDocument9 pagesUnderstanding Vector Group of Transformer (Part 2) - EEPsasenthil241464Pas encore d'évaluation
- Minimization of Starting Torque and Inrush Current of Induction Motor by Different Starting Methods Using MATLAB SIMULINKDocument6 pagesMinimization of Starting Torque and Inrush Current of Induction Motor by Different Starting Methods Using MATLAB SIMULINKEditor IJTSRDPas encore d'évaluation
- Electric Drive Lab Laboratory Manual: Dev Bhoomi Institute Chakrata Road, Navgaoun Manduwala, UttarakhandDocument15 pagesElectric Drive Lab Laboratory Manual: Dev Bhoomi Institute Chakrata Road, Navgaoun Manduwala, Uttarakhandjaya mishraPas encore d'évaluation
- Electric Drives ControlDocument29 pagesElectric Drives ControlNebyou DanielPas encore d'évaluation
- Different Methods of Speed Control of Three-Phase PDFDocument7 pagesDifferent Methods of Speed Control of Three-Phase PDFRicardo BerizzoPas encore d'évaluation
- EEE Interview Question and AnswersDocument20 pagesEEE Interview Question and AnswersAlexander JagannathanPas encore d'évaluation
- Solar InvereterDocument47 pagesSolar InvereterReshma RaviPas encore d'évaluation
- Practical Applications of Chopper DrivesDocument2 pagesPractical Applications of Chopper Drivesmplgmg0% (2)
- Automated Guided Vehicle (AGV) Full TextDocument62 pagesAutomated Guided Vehicle (AGV) Full Textazriffaris100% (2)
- dgc1000 Manual PDFDocument133 pagesdgc1000 Manual PDFBrianHazePas encore d'évaluation
- boost+DC MotorDocument7 pagesboost+DC Motorsaqib khalidPas encore d'évaluation
- 3-Phase Ac Motor Monitoring and Parameter Calculation Using Labview and DaqDocument13 pages3-Phase Ac Motor Monitoring and Parameter Calculation Using Labview and DaqahmetPas encore d'évaluation
- DC Motor Speed Control Using Pulse Width ModulationDocument5 pagesDC Motor Speed Control Using Pulse Width ModulationBharatPas encore d'évaluation
- Speed Control of DC Motor Using PWM 555 TimerDocument20 pagesSpeed Control of DC Motor Using PWM 555 TimerDEBABRATA DASPas encore d'évaluation
- Iceets 2013 6533563Document9 pagesIceets 2013 6533563Steni MoaiPas encore d'évaluation
- ElecDocument31 pagesElecdeepanshumehalawat07Pas encore d'évaluation
- 3-Phase Ac Motor Monitoring and Parameter Calculation Using Labview and DaqDocument13 pages3-Phase Ac Motor Monitoring and Parameter Calculation Using Labview and DaqInternational Journal of computational Engineering research (IJCER)Pas encore d'évaluation
- Speed Control of DC Motor Using Dual Converter: Saniya Naseem Zunjani, Amit Shrivastava, Amol BarveDocument4 pagesSpeed Control of DC Motor Using Dual Converter: Saniya Naseem Zunjani, Amit Shrivastava, Amol BarveEdul BrianPas encore d'évaluation
- 1Document8 pages1Sita GVPas encore d'évaluation
- Modelling and Simulation Speed Control of DC Motor Using PSIMDocument9 pagesModelling and Simulation Speed Control of DC Motor Using PSIMمحمد العراقيPas encore d'évaluation
- Development of PWM Based Speed Controller For DC MotorDocument23 pagesDevelopment of PWM Based Speed Controller For DC MotorBaldha JayvantPas encore d'évaluation
- Ultra Fast Acting Electronic Circuit BreakerDocument6 pagesUltra Fast Acting Electronic Circuit BreakerHarish Kumar100% (1)
- Power Electronics Lab Speed Control of DC Motor Using Pulse Width Modulation Group MembersDocument10 pagesPower Electronics Lab Speed Control of DC Motor Using Pulse Width Modulation Group MembersFaisal NiaziPas encore d'évaluation
- Speed Control of D C MOTOR Using Chopper-1308Document7 pagesSpeed Control of D C MOTOR Using Chopper-1308Moon3pellPas encore d'évaluation
- Design and Implementation of Four Quadrant DC Drive Using Class E ChopperDocument5 pagesDesign and Implementation of Four Quadrant DC Drive Using Class E ChopperbhavPas encore d'évaluation
- Final ProjectDocument27 pagesFinal ProjectMohit KeshriPas encore d'évaluation
- Applied Electricity - Laboratory Reports 1Document12 pagesApplied Electricity - Laboratory Reports 1Pradeep JayasinghePas encore d'évaluation
- Experiment No: 2 19BEE069 Date:-18/01/2022Document5 pagesExperiment No: 2 19BEE069 Date:-18/01/2022R.D SutariyaPas encore d'évaluation
- Implementation of Chopper Fed Speed Control of Sep PDFDocument6 pagesImplementation of Chopper Fed Speed Control of Sep PDFDayguel EvansPas encore d'évaluation
- Good Explanation ELCDocument12 pagesGood Explanation ELCCY KangPas encore d'évaluation
- Design of Sinusoidal Pulse Width Modulation 3 Phase Bridge InverterDocument4 pagesDesign of Sinusoidal Pulse Width Modulation 3 Phase Bridge InverterLawson SangoPas encore d'évaluation
- Microcontroller Based Solar Power Inverter: Ruchika Thukral, Ankit Gupta, Nilesh Kumar Verma, Shivanchal AsthanaDocument9 pagesMicrocontroller Based Solar Power Inverter: Ruchika Thukral, Ankit Gupta, Nilesh Kumar Verma, Shivanchal AsthanaBubai BhattacharyyaPas encore d'évaluation
- Dynamic BrakingDocument3 pagesDynamic BrakingMikhael Glen LatazaPas encore d'évaluation
- Speed Control of DC Motor: (Synopsis)Document9 pagesSpeed Control of DC Motor: (Synopsis)Aritra SanyalPas encore d'évaluation
- Irjet V4i1140 PDFDocument5 pagesIrjet V4i1140 PDFMohamed AhmedPas encore d'évaluation
- 1.1 TRIAC: BLDEA'S Engineering College DEPARTMENT OF EEE)Document9 pages1.1 TRIAC: BLDEA'S Engineering College DEPARTMENT OF EEE)Sushmita PatilPas encore d'évaluation
- DC Motor Speed Control Using ArduinoDocument20 pagesDC Motor Speed Control Using ArduinoDeepanshu patelPas encore d'évaluation
- Modified Motor PDFDocument11 pagesModified Motor PDFMD. SHAEKH ZAHAB CHOWDHURYPas encore d'évaluation
- Labview-Ni Elvis Ii Based Speed Control of DC MotorDocument4 pagesLabview-Ni Elvis Ii Based Speed Control of DC MotorDamir MiletaPas encore d'évaluation
- Information On SCR1Document10 pagesInformation On SCR1Anesu ChimhowaPas encore d'évaluation
- 06533563Document8 pages06533563MadhavanIcePas encore d'évaluation
- Induction MotorDocument6 pagesInduction MotorHamdani RizkiPas encore d'évaluation
- Thyristor Switch Operation 090075MDocument6 pagesThyristor Switch Operation 090075MIsuru Pasan Dasanayake100% (1)
- Transient Over Voltage Due To Switching Operation of Industrial Motor by Vacuum Circuit Breaker and Suppression of SurgesDocument4 pagesTransient Over Voltage Due To Switching Operation of Industrial Motor by Vacuum Circuit Breaker and Suppression of SurgesHo Jun XianPas encore d'évaluation
- An Application of Matlab/Simulink For Speed Control of DC Series Motor Using Buck ConverterDocument5 pagesAn Application of Matlab/Simulink For Speed Control of DC Series Motor Using Buck ConverterArghya MukherjeePas encore d'évaluation
- Four - Quadrant Control SystemsDocument4 pagesFour - Quadrant Control SystemsRICHARDPas encore d'évaluation
- Electrical Drives (ARG)Document24 pagesElectrical Drives (ARG)alu bhindiPas encore d'évaluation
- Separately Excited DC Motor Speed Control Using Four Quadrant ChopperDocument3 pagesSeparately Excited DC Motor Speed Control Using Four Quadrant ChopperJay S PatelPas encore d'évaluation
- PWM Stepper Motor: 2-Pole Permanent Magnet MotorDocument4 pagesPWM Stepper Motor: 2-Pole Permanent Magnet MotorSahil VoraPas encore d'évaluation
- Simulation of Closed Loop Control of Buck Converter Fed DC Motor DriveDocument4 pagesSimulation of Closed Loop Control of Buck Converter Fed DC Motor DriveIJSTEPas encore d'évaluation
- Arduino Based Multifunctional Relay For Protection of Induction MotorDocument6 pagesArduino Based Multifunctional Relay For Protection of Induction MotordaPas encore d'évaluation
- InvertersDocument6 pagesInvertersTheuns DuvenhagePas encore d'évaluation
- Project PDFDocument43 pagesProject PDFtaddese bekele100% (6)
- DC Motor ControlDocument4 pagesDC Motor ControlSurya PrakashPas encore d'évaluation
- SSRN Id3917884Document9 pagesSSRN Id3917884Asha PatilPas encore d'évaluation
- Power ElectronicsDocument27 pagesPower ElectronicsShreyas S RPas encore d'évaluation
- Met 1Document5 pagesMet 1Ářvíňď PřášáďPas encore d'évaluation
- Constructional Project: 'FeaturesDocument2 pagesConstructional Project: 'FeaturesBimoo Chandra Bimantara PutraPas encore d'évaluation
- 3 - Starter, Braking, EtcDocument22 pages3 - Starter, Braking, EtcAtul Jaysing PatilPas encore d'évaluation
- Machines PresentationDocument11 pagesMachines PresentationFarhan Labib MahinPas encore d'évaluation
- Design and Operation of DC Drive Using Class E Chopper: R.Spandhana, Syed Sarfaraz NawazDocument8 pagesDesign and Operation of DC Drive Using Class E Chopper: R.Spandhana, Syed Sarfaraz NawazismayilcPas encore d'évaluation
- Securing Document Exchange with Blockchain Technology: A New Paradigm for Information SharingDocument4 pagesSecuring Document Exchange with Blockchain Technology: A New Paradigm for Information SharingInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- The Effect of Time Variables as Predictors of Senior Secondary School Students' Mathematical Performance Department of Mathematics Education Freetown PolytechnicDocument7 pagesThe Effect of Time Variables as Predictors of Senior Secondary School Students' Mathematical Performance Department of Mathematics Education Freetown PolytechnicInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Perceived Impact of Active Pedagogy in Medical Students' Learning at the Faculty of Medicine and Pharmacy of CasablancaDocument5 pagesPerceived Impact of Active Pedagogy in Medical Students' Learning at the Faculty of Medicine and Pharmacy of CasablancaInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Formation of New Technology in Automated Highway System in Peripheral HighwayDocument6 pagesFormation of New Technology in Automated Highway System in Peripheral HighwayInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Supply Chain 5.0: A Comprehensive Literature Review on Implications, Applications and ChallengesDocument11 pagesSupply Chain 5.0: A Comprehensive Literature Review on Implications, Applications and ChallengesInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Exploring the Clinical Characteristics, Chromosomal Analysis, and Emotional and Social Considerations in Parents of Children with Down SyndromeDocument8 pagesExploring the Clinical Characteristics, Chromosomal Analysis, and Emotional and Social Considerations in Parents of Children with Down SyndromeInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Intelligent Engines: Revolutionizing Manufacturing and Supply Chains with AIDocument14 pagesIntelligent Engines: Revolutionizing Manufacturing and Supply Chains with AIInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- The Making of Self-Disposing Contactless Motion-Activated Trash Bin Using Ultrasonic SensorsDocument7 pagesThe Making of Self-Disposing Contactless Motion-Activated Trash Bin Using Ultrasonic SensorsInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Beyond Shelters: A Gendered Approach to Disaster Preparedness and Resilience in Urban CentersDocument6 pagesBeyond Shelters: A Gendered Approach to Disaster Preparedness and Resilience in Urban CentersInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Enhancing the Strength of Concrete by Using Human Hairs as a FiberDocument3 pagesEnhancing the Strength of Concrete by Using Human Hairs as a FiberInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Natural Peel-Off Mask Formulation and EvaluationDocument6 pagesNatural Peel-Off Mask Formulation and EvaluationInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Teachers' Perceptions about Distributed Leadership Practices in South Asia: A Case Study on Academic Activities in Government Colleges of BangladeshDocument7 pagesTeachers' Perceptions about Distributed Leadership Practices in South Asia: A Case Study on Academic Activities in Government Colleges of BangladeshInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Handling Disruptive Behaviors of Students in San Jose National High SchoolDocument5 pagesHandling Disruptive Behaviors of Students in San Jose National High SchoolInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Safety, Analgesic, and Anti-Inflammatory Effects of Aqueous and Methanolic Leaf Extracts of Hypericum revolutum subsp. kenienseDocument11 pagesSafety, Analgesic, and Anti-Inflammatory Effects of Aqueous and Methanolic Leaf Extracts of Hypericum revolutum subsp. kenienseInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- REDLINE– An Application on Blood ManagementDocument5 pagesREDLINE– An Application on Blood ManagementInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Placement Application for Department of Commerce with Computer Applications (Navigator)Document7 pagesPlacement Application for Department of Commerce with Computer Applications (Navigator)International Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Optimization of Process Parameters for Turning Operation on D3 Die SteelDocument4 pagesOptimization of Process Parameters for Turning Operation on D3 Die SteelInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Advancing Opthalmic Diagnostics: U-Net for Retinal Blood Vessel SegmentationDocument8 pagesAdvancing Opthalmic Diagnostics: U-Net for Retinal Blood Vessel SegmentationInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Adoption of International Public Sector Accounting Standards and Quality of Financial Reporting in National Government Agricultural Sector Entities, KenyaDocument12 pagesAdoption of International Public Sector Accounting Standards and Quality of Financial Reporting in National Government Agricultural Sector Entities, KenyaInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- A Curious Case of QuadriplegiaDocument4 pagesA Curious Case of QuadriplegiaInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- A Knowledg Graph Model for e-GovernmentDocument5 pagesA Knowledg Graph Model for e-GovernmentInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Machine Learning and Big Data Analytics for Precision Cardiac RiskStratification and Heart DiseasesDocument6 pagesMachine Learning and Big Data Analytics for Precision Cardiac RiskStratification and Heart DiseasesInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Forensic Evidence Management Using Blockchain TechnologyDocument6 pagesForensic Evidence Management Using Blockchain TechnologyInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Analysis of Financial Ratios that Relate to Market Value of Listed Companies that have Announced the Results of their Sustainable Stock Assessment, SET ESG Ratings 2023Document10 pagesAnalysis of Financial Ratios that Relate to Market Value of Listed Companies that have Announced the Results of their Sustainable Stock Assessment, SET ESG Ratings 2023International Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Pdf to Voice by Using Deep LearningDocument5 pagesPdf to Voice by Using Deep LearningInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Improvement Functional Capacity In Adult After Percutaneous ASD ClosureDocument7 pagesImprovement Functional Capacity In Adult After Percutaneous ASD ClosureInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Fruit of the Pomegranate (Punica granatum) Plant: Nutrients, Phytochemical Composition and Antioxidant Activity of Fresh and Dried FruitsDocument6 pagesFruit of the Pomegranate (Punica granatum) Plant: Nutrients, Phytochemical Composition and Antioxidant Activity of Fresh and Dried FruitsInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Food habits and food inflation in the US and India; An experience in Covid-19 pandemicDocument3 pagesFood habits and food inflation in the US and India; An experience in Covid-19 pandemicInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Severe Residual Pulmonary Stenosis after Surgical Repair of Tetralogy of Fallot: What’s Our Next Strategy?Document11 pagesSevere Residual Pulmonary Stenosis after Surgical Repair of Tetralogy of Fallot: What’s Our Next Strategy?International Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Scrolls, Likes, and Filters: The New Age Factor Causing Body Image IssuesDocument6 pagesScrolls, Likes, and Filters: The New Age Factor Causing Body Image IssuesInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Single-Chip, 2.4/5 GHZ, 2-Stream 802.11A/B/G/N and BT 4.0 + Hs Soc Solution With SST TechnologyDocument3 pagesSingle-Chip, 2.4/5 GHZ, 2-Stream 802.11A/B/G/N and BT 4.0 + Hs Soc Solution With SST TechnologyHenry Alarcón MorenoPas encore d'évaluation
- Install and Set Up Free Satellite TVDocument4 pagesInstall and Set Up Free Satellite TVAamerMAhmadPas encore d'évaluation
- IITB Electrical Power Quality Class NotesDocument56 pagesIITB Electrical Power Quality Class NotesMeghaPas encore d'évaluation
- ECE OLED TechnologyDocument22 pagesECE OLED TechnologyRavvy ChhimpaPas encore d'évaluation
- Option 2Document1 pageOption 2ttPas encore d'évaluation
- Switching Power Supply (SWP - ADJ) 5V or 3V3: PID301 PID201 PID301Document1 pageSwitching Power Supply (SWP - ADJ) 5V or 3V3: PID301 PID201 PID301มนต์ชัย บุญธนลาภPas encore d'évaluation
- Passive Network SynthesisDocument21 pagesPassive Network SynthesisSai Kyaw HtikePas encore d'évaluation
- Motorola BSS Operational Theory222222222222Document23 pagesMotorola BSS Operational Theory222222222222Jalal HalamedhPas encore d'évaluation
- Sup MotorolaDocument18 pagesSup MotorolaMario João MarioPas encore d'évaluation
- A New Triple Band Circularly Polarized S PDFDocument18 pagesA New Triple Band Circularly Polarized S PDFmaamriaPas encore d'évaluation
- CMFB DesignDocument4 pagesCMFB Designaminkhan83Pas encore d'évaluation
- Lecture 1 - MOSFETsDocument92 pagesLecture 1 - MOSFETsnqwvch8dcdPas encore d'évaluation
- EE-212-L ECD Lab 5Document2 pagesEE-212-L ECD Lab 5Saad KarimPas encore d'évaluation
- Ge Mac 5500 ElectrocardiogramDocument17 pagesGe Mac 5500 Electrocardiogramapi-283436960Pas encore d'évaluation
- HD Series™ High Performance Dish Antenna: Hdda5WDocument2 pagesHD Series™ High Performance Dish Antenna: Hdda5Wjavierdb2012Pas encore d'évaluation
- Ka3882/3/4/5 Smps Controller: Current Mode PWM ControllerDocument6 pagesKa3882/3/4/5 Smps Controller: Current Mode PWM Controllerjoil alvesPas encore d'évaluation
- Chapter 11Document51 pagesChapter 11vmspraneethPas encore d'évaluation
- Tiduai 7Document79 pagesTiduai 7mustafeez18Pas encore d'évaluation
- TSSP4038: Vishay SemiconductorsDocument5 pagesTSSP4038: Vishay SemiconductorsCarlos AlbertoPas encore d'évaluation
- ANT-ATD451800-1774 DatasheetDocument2 pagesANT-ATD451800-1774 DatasheetАнтонPas encore d'évaluation
- Cia 1105Document3 pagesCia 1105palisthaPas encore d'évaluation
- LG LCD 32sl80yr CH lp91tDocument27 pagesLG LCD 32sl80yr CH lp91tLuis MantillaPas encore d'évaluation
- Integral Cycle Speed Control of Single Phase Induction Motor.Document47 pagesIntegral Cycle Speed Control of Single Phase Induction Motor.lonemubashir50% (2)
- Introduction To MSP430 MicrocontrollersDocument32 pagesIntroduction To MSP430 MicrocontrollersAlejandro OrtizPas encore d'évaluation
- Manuel Novastar MCTRL660 PDFDocument28 pagesManuel Novastar MCTRL660 PDFGabriel CheminPas encore d'évaluation