Vous aimerez peut-être aussi
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- OHSU Inclusive Language Guide - 031521Document17 pagesOHSU Inclusive Language Guide - 031521Mohammad SabbaghPas encore d'évaluation
- The Human Brain Prenatal Development and Structure, Springer, 2010 PDFDocument157 pagesThe Human Brain Prenatal Development and Structure, Springer, 2010 PDFZuzu FinusPas encore d'évaluation
- Brain Structure Psychology PDFDocument8 pagesBrain Structure Psychology PDFCristian Florin Crasmaru100% (1)
- Cosmides 1985 Chap1Document17 pagesCosmides 1985 Chap1Mohammad SabbaghPas encore d'évaluation
- Basic Brain AnatomyDocument36 pagesBasic Brain Anatomymartha wibawaPas encore d'évaluation
- OHSU Inclusive Language Guide - 031521Document17 pagesOHSU Inclusive Language Guide - 031521Mohammad SabbaghPas encore d'évaluation
- Commission On Language Learning Americas LanguagesDocument64 pagesCommission On Language Learning Americas Languages1117Pas encore d'évaluation
- Commission On Language Learning Americas LanguagesDocument64 pagesCommission On Language Learning Americas Languages1117Pas encore d'évaluation
- A5 (Ii)Document293 pagesA5 (Ii)Mohammad SabbaghPas encore d'évaluation
- DanskDocument2 pagesDanskMohammad SabbaghPas encore d'évaluation
- NACM Plain Language Guide 20190107Document89 pagesNACM Plain Language Guide 20190107Mohammad SabbaghPas encore d'évaluation
- Inclusive Language-GuidelinesDocument27 pagesInclusive Language-GuidelinesJason BealsPas encore d'évaluation
- Language GuideDocument38 pagesLanguage GuideMohammad SabbaghPas encore d'évaluation
- Language A - Language and Literature GuideDocument76 pagesLanguage A - Language and Literature Guideplath_236546100% (1)
- BIM Manager - Sample1Document2 pagesBIM Manager - Sample1Mohammad SabbaghPas encore d'évaluation
- B2 - Strategies For Tunnel Models Using AECOsim Building DesignerDocument62 pagesB2 - Strategies For Tunnel Models Using AECOsim Building DesignerMohammad SabbaghPas encore d'évaluation
- ApplscDocument15 pagesApplscMohammad SabbaghPas encore d'évaluation
- European Bank For Reconstruction and Development: Focus On EnvironmentDocument77 pagesEuropean Bank For Reconstruction and Development: Focus On EnvironmentMohammad SabbaghPas encore d'évaluation
- IMnMiwQrdAa6Wyw0mAgf 150 Common Verbs in DanishDocument153 pagesIMnMiwQrdAa6Wyw0mAgf 150 Common Verbs in DanishMohammad Sabbagh100% (1)
- Emsn020 01madeira 02seismicrisk00hazard Details-Tile1018 v1 300dpiDocument1 pageEmsn020 01madeira 02seismicrisk00hazard Details-Tile1018 v1 300dpiMohammad SabbaghPas encore d'évaluation
- HSS Article HSS Connection Software 113021Document7 pagesHSS Article HSS Connection Software 113021Mohammad SabbaghPas encore d'évaluation
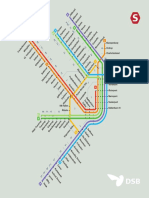
- S-Tog K08 DSBDocument5 pagesS-Tog K08 DSBDSB K08 DKPas encore d'évaluation
- Architectural & Structural: 3D Modeling & VisualizationDocument1 pageArchitectural & Structural: 3D Modeling & VisualizationMohammad SabbaghPas encore d'évaluation
- ApplscDocument15 pagesApplscMohammad SabbaghPas encore d'évaluation
- European Bank For Reconstruction and Development: Focus On EnvironmentDocument77 pagesEuropean Bank For Reconstruction and Development: Focus On EnvironmentMohammad SabbaghPas encore d'évaluation
- Definitions of SustainabilityDocument2 pagesDefinitions of SustainabilityRohan TangriPas encore d'évaluation
- Super Integration: A Cross-Disciplinary Approach Towards DesignDocument16 pagesSuper Integration: A Cross-Disciplinary Approach Towards DesignMohammad SabbaghPas encore d'évaluation
- Guide: Relocation To DenmarkDocument13 pagesGuide: Relocation To DenmarkMohammad SabbaghPas encore d'évaluation
- The Periodic Table: Done by Kamal ElsabbaghDocument3 pagesThe Periodic Table: Done by Kamal ElsabbaghMohammad SabbaghPas encore d'évaluation
- The Periodic Table: Done by Kamal ElsabbaghDocument3 pagesThe Periodic Table: Done by Kamal ElsabbaghMohammad SabbaghPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- 2019 Course CatalogDocument31 pages2019 Course CatalogDeepen SharmaPas encore d'évaluation
- GLOBAL Hydro Turbine Folder enDocument4 pagesGLOBAL Hydro Turbine Folder enGogyPas encore d'évaluation
- Embankment PDFDocument5 pagesEmbankment PDFTin Win HtutPas encore d'évaluation
- Young Women's Sexuality in Perrault and CarterDocument4 pagesYoung Women's Sexuality in Perrault and CarterOuki MilestonePas encore d'évaluation
- EP - EngineDocument4 pagesEP - EngineAkhmad HasimPas encore d'évaluation
- Nickel-Metal Hydride Battery Safety Data SheetDocument8 pagesNickel-Metal Hydride Battery Safety Data SheetYeong WheePas encore d'évaluation
- Tetracyclines: Dr. Md. Rageeb Md. Usman Associate Professor Department of PharmacognosyDocument21 pagesTetracyclines: Dr. Md. Rageeb Md. Usman Associate Professor Department of PharmacognosyAnonymous TCbZigVqPas encore d'évaluation
- 2 - Elements of Interior DesignDocument4 pages2 - Elements of Interior DesignYathaarth RastogiPas encore d'évaluation
- ADDRESSABLE 51.HI 60854 G Contoller GuideDocument76 pagesADDRESSABLE 51.HI 60854 G Contoller Guidemohinfo88Pas encore d'évaluation
- g4 - Stress Analysis of Operating Gas Pipeline Installed by HorizontalDocument144 pagesg4 - Stress Analysis of Operating Gas Pipeline Installed by HorizontalDevin DickenPas encore d'évaluation
- Space DynamicsDocument37 pagesSpace Dynamicspurushottam KashyapPas encore d'évaluation
- AI Model Sentiment AnalysisDocument6 pagesAI Model Sentiment AnalysisNeeraja RanjithPas encore d'évaluation
- STS Chapter 1 ReviewerDocument4 pagesSTS Chapter 1 ReviewerEunice AdagioPas encore d'évaluation
- Validation Master PlanDocument27 pagesValidation Master PlanPrashansa Shrestha85% (13)
- Maintenance Handbook On Compressors (Of Under Slung AC Coaches) PDFDocument39 pagesMaintenance Handbook On Compressors (Of Under Slung AC Coaches) PDFSandeepPas encore d'évaluation
- Aortic Stenosis, Mitral Regurgitation, Pulmonary Stenosis, and Tricuspid Regurgitation: Causes, Symptoms, Signs, and TreatmentDocument7 pagesAortic Stenosis, Mitral Regurgitation, Pulmonary Stenosis, and Tricuspid Regurgitation: Causes, Symptoms, Signs, and TreatmentChuu Suen TayPas encore d'évaluation
- Tutorial On The ITU GDocument7 pagesTutorial On The ITU GCh RambabuPas encore d'évaluation
- RPG-7 Rocket LauncherDocument3 pagesRPG-7 Rocket Launchersaledin1100% (3)
- Effect of Some Algal Filtrates and Chemical Inducers On Root-Rot Incidence of Faba BeanDocument7 pagesEffect of Some Algal Filtrates and Chemical Inducers On Root-Rot Incidence of Faba BeanJuniper PublishersPas encore d'évaluation
- مقدمةDocument5 pagesمقدمةMahmoud MadanyPas encore d'évaluation
- Detection and Attribution Methodologies Overview: Appendix CDocument9 pagesDetection and Attribution Methodologies Overview: Appendix CDinesh GaikwadPas encore d'évaluation
- Taking Back SundayDocument9 pagesTaking Back SundayBlack CrowPas encore d'évaluation
- Pioneer XC-L11Document52 pagesPioneer XC-L11adriangtamas1983Pas encore d'évaluation
- What Is DSP BuilderDocument3 pagesWhat Is DSP BuilderĐỗ ToànPas encore d'évaluation
- DENSO COMMON RAIL INJECTOR REPAIR GUIDEDocument22 pagesDENSO COMMON RAIL INJECTOR REPAIR GUIDEMarcoPas encore d'évaluation
- Reiki BrochureDocument2 pagesReiki BrochureShikha AgarwalPas encore d'évaluation
- Pitch Manual SpecializedDocument20 pagesPitch Manual SpecializedRoberto Gomez100% (1)
- SRS Design Guidelines PDFDocument46 pagesSRS Design Guidelines PDFLia FernandaPas encore d'évaluation
- Ultrasonic Weld Examination ProcedureDocument16 pagesUltrasonic Weld Examination ProcedureramalingamPas encore d'évaluation
- Entrepreneurship Project On Jam, Jelly & PicklesDocument24 pagesEntrepreneurship Project On Jam, Jelly & Picklesashish karshinkarPas encore d'évaluation