Vous aimerez peut-être aussi
- Manual de Usuario QUIPUX - EPN PDFDocument33 pagesManual de Usuario QUIPUX - EPN PDFCarlos CorellaPas encore d'évaluation
- Ficha Tecnica Acero Galvanizado PDFDocument3 pagesFicha Tecnica Acero Galvanizado PDFAndrew CalderónPas encore d'évaluation
- PLC LogoDocument14 pagesPLC LogoAndrew CalderónPas encore d'évaluation
- Mciaccia-Trabajo Escrito - Hand Exo PDFDocument148 pagesMciaccia-Trabajo Escrito - Hand Exo PDFAndrew CalderónPas encore d'évaluation
- Tipos de AlambresDocument9 pagesTipos de AlambresBarbara MezaPas encore d'évaluation
- Bases Del ConcursoDocument1 pageBases Del ConcursoAndrew CalderónPas encore d'évaluation
- PLC LogoDocument14 pagesPLC LogoAndrew CalderónPas encore d'évaluation
- 1.6 Fijacion de PreciosDocument21 pages1.6 Fijacion de PreciosAndrew CalderónPas encore d'évaluation
- Fact - 003 193 000005912Document1 pageFact - 003 193 000005912Andrew CalderónPas encore d'évaluation
- Dialnet EstudioDelEstadoDelArteDeLasProtesisDeMano 5972783Document8 pagesDialnet EstudioDelEstadoDelArteDeLasProtesisDeMano 5972783HeRnan AnTonyo ChapidPas encore d'évaluation
- Diseño e Implementación de Sistemas de Control Aplicados A Un Exoesqueleto para La Rehabilitación de La ManoDocument186 pagesDiseño e Implementación de Sistemas de Control Aplicados A Un Exoesqueleto para La Rehabilitación de La ManoLucheys YubaillePas encore d'évaluation
- N 4 A 10Document9 pagesN 4 A 10Andrew CalderónPas encore d'évaluation
- InformeDocument6 pagesInformeDgf CmaPas encore d'évaluation
- Storage PLC SiemensDocument3 pagesStorage PLC SiemensAndrew CalderónPas encore d'évaluation
- Domotica PDFDocument51 pagesDomotica PDFoscarpolancoPas encore d'évaluation
- PFC Alvaro Villoslada Pecina PDFDocument200 pagesPFC Alvaro Villoslada Pecina PDFAndrew CalderónPas encore d'évaluation
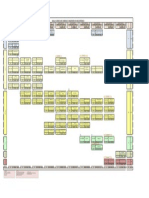
- Malla Curricular CimeDocument1 pageMalla Curricular CimeCarlos Andres Cerón PugaPas encore d'évaluation
- Turbinas HidraúlicasDocument81 pagesTurbinas HidraúlicasAlex353Pas encore d'évaluation
- Domotica PDFDocument51 pagesDomotica PDFoscarpolancoPas encore d'évaluation
- Clasificacion de Las Turbinas HidraulicasDocument19 pagesClasificacion de Las Turbinas HidraulicasAndrew CalderónPas encore d'évaluation
- Dimensionamiento Turbinas Centrales Hidroeléctricas (Miguillas) PDFDocument121 pagesDimensionamiento Turbinas Centrales Hidroeléctricas (Miguillas) PDFJFREY1504Pas encore d'évaluation
- Tabla de Elementos DomoticosDocument8 pagesTabla de Elementos DomoticosAndrew CalderónPas encore d'évaluation
- EPPDocument107 pagesEPPWeb NavegadorPas encore d'évaluation
- Planificación FinancieraDocument92 pagesPlanificación FinancieraAndrew CalderónPas encore d'évaluation
- Computer Numeric Control PDFDocument92 pagesComputer Numeric Control PDFAndrew CalderónPas encore d'évaluation
- Ejercicios de GraficasDocument1 pageEjercicios de GraficasAndrew CalderónPas encore d'évaluation
- Quimica Textil Articulo Cientifico 2Document10 pagesQuimica Textil Articulo Cientifico 2Andrew CalderónPas encore d'évaluation
- Tabla de Elementos DomoticosDocument8 pagesTabla de Elementos DomoticosAndrew CalderónPas encore d'évaluation
- Hi Latura 20 Laner A 201Document124 pagesHi Latura 20 Laner A 201Andrew CalderónPas encore d'évaluation
- Transmisiones PowershiftDocument4 pagesTransmisiones PowershiftMark Martin100% (10)
- Cap I, ABSTRACCION DE DATOS PDFDocument55 pagesCap I, ABSTRACCION DE DATOS PDFPamela Vásquez CostalesPas encore d'évaluation
- Bibliografía ICP1 1c 2023 CONFORMATODocument3 pagesBibliografía ICP1 1c 2023 CONFORMATOJenny PauriPas encore d'évaluation
- EXP. APREND 5. ACT. 2 ESCRIBE Del 22 de Agosto Al 26 de AgostoDocument7 pagesEXP. APREND 5. ACT. 2 ESCRIBE Del 22 de Agosto Al 26 de AgostoJames anthony Guerrero garciaPas encore d'évaluation
- Plan de Cierre 10Document15 pagesPlan de Cierre 10Richard LlanosPas encore d'évaluation
- Líneas de Espera Ejercicios 1 Al 6Document9 pagesLíneas de Espera Ejercicios 1 Al 6Ingrid Lisbeth Avila Martinez67% (3)
- Registro - 5A-P - Escritura 3 FichasDocument9 pagesRegistro - 5A-P - Escritura 3 FichasFlorcita Ruiz EliasPas encore d'évaluation
- Investigacion PolicialDocument120 pagesInvestigacion PolicialWilbert Teodoro Mayta DionisioPas encore d'évaluation
- Inversa S PDFDocument8 pagesInversa S PDFFrank MarquezPas encore d'évaluation
- Collier, David - El Método Comparativo. Dos Décadas de Cambio PDFDocument16 pagesCollier, David - El Método Comparativo. Dos Décadas de Cambio PDFElías FernándezPas encore d'évaluation
- Cap. 1evolución e Importancia de La Calidad TotalDocument17 pagesCap. 1evolución e Importancia de La Calidad TotalRaúl MorfinPas encore d'évaluation
- Michael Faraday Revista Num4 PDFDocument3 pagesMichael Faraday Revista Num4 PDFMateo PePas encore d'évaluation
- Solanes Venzala, David - Ve Por Mi A Las Llamas Verdes (1991)Document0 pageSolanes Venzala, David - Ve Por Mi A Las Llamas Verdes (1991)jalfcuriosoPas encore d'évaluation
- Aban CayDocument216 pagesAban CayAlmendra RosalesPas encore d'évaluation
- EAM Mantenimiento PDFDocument3 pagesEAM Mantenimiento PDFgatunovidalPas encore d'évaluation
- Expresiones Periodicas Puras y Mixtas Notacion CientificaDocument6 pagesExpresiones Periodicas Puras y Mixtas Notacion CientificaLuffyGod CrackProOnlyfansPremium666NekoKawaiUwuPas encore d'évaluation
- Marco ConceptualDocument14 pagesMarco ConceptualJyuno RxPas encore d'évaluation
- Turno Matutino 2018 PDFDocument10 pagesTurno Matutino 2018 PDFgato gatoPas encore d'évaluation
- ACTIVIDAD 2 - Iomara GaitanDocument7 pagesACTIVIDAD 2 - Iomara GaitaniomaraPas encore d'évaluation
- EnsayoDocument9 pagesEnsayoJessy CelyPas encore d'évaluation
- Trbajo de Shunko TerminadoDocument25 pagesTrbajo de Shunko TerminadoSergio Kronemberger Inthemix0% (2)
- El Valor de La VidaDocument4 pagesEl Valor de La VidaAndrés FlorézPas encore d'évaluation
- Manual FSC IV 2015Document101 pagesManual FSC IV 2015Edvard FranciscoPas encore d'évaluation
- El Evangelio Social y El Fundamentalismo PDFDocument14 pagesEl Evangelio Social y El Fundamentalismo PDFVasKo_Pas encore d'évaluation
- Eva Pierrakos y Donovan Thesenga No Temas El MalDocument99 pagesEva Pierrakos y Donovan Thesenga No Temas El MalElena OropezaPas encore d'évaluation
- Campos de Sociologia Bajo PresionDocument12 pagesCampos de Sociologia Bajo PresionjulianPas encore d'évaluation
- C1 Preparcial Proba 2023 2Document5 pagesC1 Preparcial Proba 2023 2Rodríguez Mayorga María CamilaPas encore d'évaluation
- Triptico de CostosDocument3 pagesTriptico de CostosTonyRamirez75% (4)
- Simplificación AdministrativaDocument13 pagesSimplificación AdministrativaHenry QMPas encore d'évaluation
- Guía 1 Sistema Nervioso 2 MedioDocument2 pagesGuía 1 Sistema Nervioso 2 MedioBlanca Canales ReyesPas encore d'évaluation