Vous aimerez peut-être aussi
- Caso BenettonDocument5 pagesCaso BenettonJennifer Martínez GonzálezPas encore d'évaluation
- AndercolDocument22 pagesAndercolomar corralesPas encore d'évaluation
- Formato Planilla Entrega CarnetDocument1 pageFormato Planilla Entrega CarnetDANIEL ALEJANDRO ZAMBRANO MONTAÑAPas encore d'évaluation
- Inspección de CanaletasDocument1 pageInspección de CanaletasJorge Raúl Cutipa AylasPas encore d'évaluation
- ING-PRO-040 - Procedimiento de Proveedores IngenacDocument6 pagesING-PRO-040 - Procedimiento de Proveedores IngenacMarydela ValderramaPas encore d'évaluation
- GFPI-F-020 Formato Lista de Chequeo Ambiente de AprendizajeDocument4 pagesGFPI-F-020 Formato Lista de Chequeo Ambiente de AprendizajeKevin Cabana100% (2)
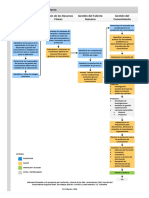
- Flujograma Gestión Del Conocimiento 1Document1 pageFlujograma Gestión Del Conocimiento 1Yuber0% (1)
- Formato de Acciones Preventiva y CorrectivasDocument2 pagesFormato de Acciones Preventiva y Correctivaslercy olivero perezPas encore d'évaluation
- Matriz de Comunicación HSEQDocument12 pagesMatriz de Comunicación HSEQJENNY PAOLA CAVICHE VELEZPas encore d'évaluation
- ICA-1a QuimboDocument92 pagesICA-1a QuimboMariela Méndez CPas encore d'évaluation
- Ficha Tecnica Simulacros RealizadosDocument1 pageFicha Tecnica Simulacros RealizadosNicoleAgudelo100% (1)
- Stakeholder Analysis (Análisis de Los Actores)Document3 pagesStakeholder Analysis (Análisis de Los Actores)lgrome73Pas encore d'évaluation
- SST-PR-12 Programa Trabajo en AlturasDocument28 pagesSST-PR-12 Programa Trabajo en Alturasjulio RiveraPas encore d'évaluation
- Proforma de Material de EscritorioDocument3 pagesProforma de Material de EscritorioJuanPas encore d'évaluation
- Formato Inspección Riesgo ElectricoDocument2 pagesFormato Inspección Riesgo ElectricoAlejandro PosadaPas encore d'évaluation
- Matriz de Peligros Grupo N°4Document56 pagesMatriz de Peligros Grupo N°4Rayner MarquésPas encore d'évaluation
- ENSAYODocument7 pagesENSAYOYeison GruesoPas encore d'évaluation
- Hs Extintor - Agua 2015Document4 pagesHs Extintor - Agua 2015jjayruizPas encore d'évaluation
- Formato 1-Herramientas en Mal EstadoDocument9 pagesFormato 1-Herramientas en Mal EstadomaybyPas encore d'évaluation
- Planilla Entrega de Regalos Diciembre - 18Document6 pagesPlanilla Entrega de Regalos Diciembre - 18Andreytha RinconPas encore d'évaluation
- Plan de Gestion de Riesgo y Manejo de AccidentesDocument17 pagesPlan de Gestion de Riesgo y Manejo de AccidentesArgenida Villareal ArrietaPas encore d'évaluation
- Matriz de Riesgos y OportunidadesDocument4 pagesMatriz de Riesgos y OportunidadesCarlitos Sanchez100% (1)
- Hoja de Vida Sierra CintaDocument2 pagesHoja de Vida Sierra CintaManuelaPas encore d'évaluation
- O-C-Sst-F Formato Encuesta Riesgos LaboralesDocument3 pagesO-C-Sst-F Formato Encuesta Riesgos LaboralesDIANA PINZON HERNANDEZPas encore d'évaluation
- MATRIZ DE RIESGOS Coca Cola-1Document4 pagesMATRIZ DE RIESGOS Coca Cola-1elenapatricia mejia GuerreroPas encore d'évaluation
- Matriz ResponsabilidadesDocument2 pagesMatriz ResponsabilidadesSusanaPas encore d'évaluation
- Es-Sig-Rg-30 Formato de Inspeccion de Puntos EcologicosDocument1 pageEs-Sig-Rg-30 Formato de Inspeccion de Puntos EcologicosAngélica HenaoPas encore d'évaluation
- Formato de Inspeccion de Botiquines Areas Administrativas DGSMDocument2 pagesFormato de Inspeccion de Botiquines Areas Administrativas DGSMLIZETTE PERALTAPas encore d'évaluation
- Pest ConfeccionesDocument4 pagesPest ConfeccionesKATHERYNE PANQUEVAPas encore d'évaluation
- Politica SIG y Politicas Asociadas Al SGCS-BASC, Objetivos e Indicadores - OPEDocument20 pagesPolitica SIG y Politicas Asociadas Al SGCS-BASC, Objetivos e Indicadores - OPErpumacayovPas encore d'évaluation
- Informe Ciclo de VidaDocument16 pagesInforme Ciclo de VidaLesiones Al HigadoPas encore d'évaluation
- InforPractica 3Document17 pagesInforPractica 3Jacqueline SanchezPas encore d'évaluation
- 2.-Taller de Inv de AccidDocument30 pages2.-Taller de Inv de AccidKatherine Stela Rucabado LlatasPas encore d'évaluation
- Formato Evaluación y Selección de Proveedores. FichaDocument9 pagesFormato Evaluación y Selección de Proveedores. FichaEncarniVergaraPas encore d'évaluation
- Sga PinolDocument8 pagesSga PinolLiz Q. AvilaPas encore d'évaluation
- Ficha de Seguridad ALGUICIDADocument5 pagesFicha de Seguridad ALGUICIDALoraine DVPas encore d'évaluation
- Taller Formato de Proyecto de InnovaciónDocument4 pagesTaller Formato de Proyecto de InnovaciónJavier CairoPas encore d'évaluation
- Plan QHSE CompanyManDocument33 pagesPlan QHSE CompanyManEnilse IllescasPas encore d'évaluation
- Permiso de Trabajos GeneralesDocument7 pagesPermiso de Trabajos GeneralesAdrian HernándezPas encore d'évaluation
- Caracterización de ProcesosDocument24 pagesCaracterización de ProcesosCesar Hernández RamírezPas encore d'évaluation
- Informe Orden y AseoDocument18 pagesInforme Orden y AseoAlfredo MENA QUEJADAPas encore d'évaluation
- 1 Listas de Chequeo CloroDocument5 pages1 Listas de Chequeo CloroAmalia Gil JuárezPas encore d'évaluation
- 1.2.1 Matriz Dofa Carbones Del OrienteDocument1 page1.2.1 Matriz Dofa Carbones Del OrienteWilmer RoaPas encore d'évaluation
- Matriz de Peligros y Valoracion de Riesgos FLEXPORT 2018Document259 pagesMatriz de Peligros y Valoracion de Riesgos FLEXPORT 2018juliethPas encore d'évaluation
- 033 Solicitud de Acción de Mejoramiento SamDocument2 pages033 Solicitud de Acción de Mejoramiento SamAndres David HerradaPas encore d'évaluation
- F-Op-23 Cronograma de Mtto Calibracion y Verificacion de Equipos de La Linea de Inspeccion 2020Document1 pageF-Op-23 Cronograma de Mtto Calibracion y Verificacion de Equipos de La Linea de Inspeccion 2020lizet Ocampo100% (1)
- Matriz IPER TERNIUM ACM 2016Document49 pagesMatriz IPER TERNIUM ACM 2016Miguel de LeonPas encore d'évaluation
- Formato Hoja Vida SenaDocument2 pagesFormato Hoja Vida SenaTomas JaramilloPas encore d'évaluation
- Check List INGENIERIADocument1 pageCheck List INGENIERIAMiguel AlvarezPas encore d'évaluation
- Procedimientos Carrotanque TransdeltaDocument3 pagesProcedimientos Carrotanque TransdeltaIVETH MELISSA NIÑO ROMEROPas encore d'évaluation
- Gth-f-45 Formato Sst-Hoja de Vida e Inspección de Extintores y Gabinetes de Emergencia. 2.0Document4 pagesGth-f-45 Formato Sst-Hoja de Vida e Inspección de Extintores y Gabinetes de Emergencia. 2.0carlos trianaPas encore d'évaluation
- Procedimiento Servicio Al ClienteDocument3 pagesProcedimiento Servicio Al ClienteDanielaPas encore d'évaluation
- GUIA 1-Iso-9001-1401-45001Document4 pagesGUIA 1-Iso-9001-1401-45001DayanFelipePerezLadinoPas encore d'évaluation
- Acta ValidaciónDocument4 pagesActa ValidaciónJaime Lara VegaPas encore d'évaluation
- Informe Mensual de InspecciónDocument6 pagesInforme Mensual de InspecciónFernandoPas encore d'évaluation
- FT-SST-083 Formato Entrega Dotación BrigadistasDocument1 pageFT-SST-083 Formato Entrega Dotación BrigadistasCarlos Francisco Croitoru BayonaPas encore d'évaluation
- Matriz de Identificacion Riesgos Laborales ModeloDocument4 pagesMatriz de Identificacion Riesgos Laborales ModeloMarkiño CruzPas encore d'évaluation
- GTH-F-253 Formato Plantilla Plan de SaneamientoDocument10 pagesGTH-F-253 Formato Plantilla Plan de SaneamientoMauricio MolinaPas encore d'évaluation
- M187Neo-robotics 20240411 141239 0000Document8 pagesM187Neo-robotics 20240411 141239 0000alePas encore d'évaluation
- Actividad Central Unidad 1 Diseno de Un Producto Electronico Con Microcontroladores PDFDocument3 pagesActividad Central Unidad 1 Diseno de Un Producto Electronico Con Microcontroladores PDFOMAR YESID MARTINEZ PENAPas encore d'évaluation
- PoblacionDocument2 pagesPoblacionRoxanaPas encore d'évaluation
- LípidosDocument193 pagesLípidosRoxana100% (2)
- AguaDocument30 pagesAguaRoxanaPas encore d'évaluation
- Hidratos de CarbonoDocument82 pagesHidratos de CarbonoRoxanaPas encore d'évaluation
- Balance de ComprobaciónDocument1 pageBalance de ComprobaciónRoxanaPas encore d'évaluation
- IntroducciónDocument15 pagesIntroducciónRoxanaPas encore d'évaluation
- Aceite de RecinoDocument154 pagesAceite de RecinoRoxanaPas encore d'évaluation
- First Class EI Vocabulary-1523650947Document10 pagesFirst Class EI Vocabulary-1523650947RoxanaPas encore d'évaluation
- Ficha de IqgDocument2 pagesFicha de IqgRoxanaPas encore d'évaluation
- Temas de Exposicion-Sistema Integrado de CalidadDocument3 pagesTemas de Exposicion-Sistema Integrado de CalidadRoxanaPas encore d'évaluation
- Mi CronogramaDocument4 pagesMi CronogramaRoxanaPas encore d'évaluation
- Consejos para El Éxito: Título Secundario Título SecundarioDocument1 pageConsejos para El Éxito: Título Secundario Título SecundarioRoxanaPas encore d'évaluation
- Gestion de CalidadDocument16 pagesGestion de CalidadRoxanaPas encore d'évaluation
- Mi CronogramaDocument4 pagesMi CronogramaRoxanaPas encore d'évaluation
- EncuestaDocument3 pagesEncuestaRoxanaPas encore d'évaluation
- Tarea 5Document5 pagesTarea 5RoxanaPas encore d'évaluation
- Proyecto Brazo RobotDocument12 pagesProyecto Brazo RobotRoxanaPas encore d'évaluation
- Riesgo ElectricoDocument20 pagesRiesgo ElectricoRoxanaPas encore d'évaluation
- Tarea 4Document8 pagesTarea 4RoxanaPas encore d'évaluation
- Tarea 4Document8 pagesTarea 4RoxanaPas encore d'évaluation
- Consejos para El Éxito: Título Secundario Título SecundarioDocument1 pageConsejos para El Éxito: Título Secundario Título Secundariopaolo111Pas encore d'évaluation
- Elevadores de CangilonesDocument24 pagesElevadores de CangilonesRoxanaPas encore d'évaluation
- Fermentacion de AlimentosDocument8 pagesFermentacion de AlimentosRoxanaPas encore d'évaluation
- Tarea 3 AnalisisDocument1 pageTarea 3 AnalisisRoxanaPas encore d'évaluation
- EncuestaDocument3 pagesEncuestaRoxanaPas encore d'évaluation
- 2004 Parte29Document10 pages2004 Parte29Eliseo Porcel HuayraPas encore d'évaluation
- Fresa DoraDocument26 pagesFresa DoraRoxanaPas encore d'évaluation
- 03-5 PLAN DE CUENTAS SuperCíasDocument13 pages03-5 PLAN DE CUENTAS SuperCíasSandra MuñozPas encore d'évaluation
- Proyecto para La Produccion de Nectar de CarambolaDocument94 pagesProyecto para La Produccion de Nectar de CarambolaRoxanaPas encore d'évaluation
- Articulo de InglesDocument2 pagesArticulo de InglesRoxanaPas encore d'évaluation
- Granulometria de AgregadosDocument9 pagesGranulometria de AgregadosJò Isco CamarenaPas encore d'évaluation
- Trabajo de MatematicasDocument1 pageTrabajo de MatematicasAndres EspinozaPas encore d'évaluation
- CABLEDUCTOSDocument13 pagesCABLEDUCTOSMilton CarrilloPas encore d'évaluation
- Diagrama de FlujoDocument1 pageDiagrama de FlujoVanessaPalomoPas encore d'évaluation
- Sugerencias para IntervenciónDocument2 pagesSugerencias para IntervenciónuueeooPas encore d'évaluation
- Registro Etapa III Alianza Con El Socio ComunitarioDocument2 pagesRegistro Etapa III Alianza Con El Socio Comunitarioclaudiaaguirrearaya15Pas encore d'évaluation
- 5 Características Principales Del FreelancerDocument2 pages5 Características Principales Del Freelancerelf73100% (1)
- Data Center ComplementosDocument3 pagesData Center ComplementosAkin100% (1)
- Aprenda A Crear Un Icono de Lápiz Lindo en Adobe IllustratorDocument17 pagesAprenda A Crear Un Icono de Lápiz Lindo en Adobe Illustratorjoma988Pas encore d'évaluation
- Circuitos Monoestables EstablesDocument25 pagesCircuitos Monoestables EstablesorlandjctoPas encore d'évaluation
- Manual Sun2 PDF EsDocument134 pagesManual Sun2 PDF EsOscar Santos100% (1)
- Etapas Del EventoDocument7 pagesEtapas Del Eventoangie melissaPas encore d'évaluation
- Instrumentos de Cuerda, Viento, Percusion Entre OtrosDocument15 pagesInstrumentos de Cuerda, Viento, Percusion Entre OtrosGregory The-Grego DeajayPas encore d'évaluation
- Resumen La Carrera GoldrattDocument8 pagesResumen La Carrera Goldrattakd4767% (3)
- Cuestionario Analitica TerminadoDocument17 pagesCuestionario Analitica TerminadoCarlos Suppo100% (1)
- Guia Reparacion de Motores de Combustion InternaDocument58 pagesGuia Reparacion de Motores de Combustion InternaAlfredo Quispe Alvaro0% (1)
- Apuntes de Mediciones Hidrológicas y AmbientalesDocument236 pagesApuntes de Mediciones Hidrológicas y AmbientalesJavier Avila BiebarachPas encore d'évaluation
- Actividad de La Unid. 1+trabajo+en++++equipoDocument3 pagesActividad de La Unid. 1+trabajo+en++++equipoLuis Alberto Feliz VillanuevaPas encore d'évaluation
- Instalaciones: RT NDTDocument4 pagesInstalaciones: RT NDTEfrain PonsePas encore d'évaluation
- Tornillo MicrometricoDocument8 pagesTornillo MicrometricoRusber Orlando Sandoval GarzonPas encore d'évaluation
- Campo UnificadoDocument50 pagesCampo UnificadoCandy ElizabethPas encore d'évaluation
- Martín Felipe Castagnet - El Viaje de La Ciencia Ficción Argentina A Los Confines Del Espacio InteriorDocument10 pagesMartín Felipe Castagnet - El Viaje de La Ciencia Ficción Argentina A Los Confines Del Espacio InteriorEmilia Macchi100% (1)
- IEB Sistema de Puesta A TierraDocument44 pagesIEB Sistema de Puesta A TierrasalvandyPas encore d'évaluation
- Control y Prevencion de Incendios en Operaciones MinerasDocument9 pagesControl y Prevencion de Incendios en Operaciones MinerasLuis Miguel Guere BalvinPas encore d'évaluation
- Capacidades de Compresores-1 PDFDocument17 pagesCapacidades de Compresores-1 PDFliderfgvPas encore d'évaluation
- Casing 4 1/2" N-80 11.60 Lb/pie BCN - CRDocument1 pageCasing 4 1/2" N-80 11.60 Lb/pie BCN - CRGarcia MarinPas encore d'évaluation
- EVALUACION Unidad 1 Conceptos Basicos de ElectricidadDocument4 pagesEVALUACION Unidad 1 Conceptos Basicos de Electricidadana milena acevedoPas encore d'évaluation
- Caes 2Document26 pagesCaes 2Francisco Cordoba MoralesPas encore d'évaluation
- Extensiones PDFDocument0 pageExtensiones PDFwalexx04Pas encore d'évaluation
- Carga Fabril, (Muy Bueno) .Document23 pagesCarga Fabril, (Muy Bueno) .chivoloco77100% (3)