Vous aimerez peut-être aussi
- Prpo Epnoc GreaseDocument5 pagesPrpo Epnoc GreaseRisali AddiniPas encore d'évaluation
- ME Formula by Tordillo IMG - 0024Document1 pageME Formula by Tordillo IMG - 0024Arwyn BermasPas encore d'évaluation
- MR 3 2020 Polar DualityDocument10 pagesMR 3 2020 Polar DualityUrsu ValeriuPas encore d'évaluation
- Unit 4 Root Locus - DiagramsDocument11 pagesUnit 4 Root Locus - DiagramsrameshsmePas encore d'évaluation
- 365 39 Solutions Instructor Manual Chapter 3 Finite AutomataDocument9 pages365 39 Solutions Instructor Manual Chapter 3 Finite AutomataHARSHRAJSINH SOLANKIPas encore d'évaluation
- Img - 0047 MCQ Ece Board Exam 81Document1 pageImg - 0047 MCQ Ece Board Exam 81Arwyn BermasPas encore d'évaluation
- Sistemas Digitales - 6Document1 pageSistemas Digitales - 6José Antonio Reyes CardosoPas encore d'évaluation
- RPS Ipi 2Document13 pagesRPS Ipi 2scholisPas encore d'évaluation
- KITZ Steel Ball Valves Trunnion Type E-202-07Document23 pagesKITZ Steel Ball Valves Trunnion Type E-202-07yohaneswpPas encore d'évaluation
- Berkey Colortran Distribution Equipment Distribution Center Hanging Cord Type Spec Sheet 1979Document2 pagesBerkey Colortran Distribution Equipment Distribution Center Hanging Cord Type Spec Sheet 1979Alan MastersPas encore d'évaluation
- Img - 0051 MCQ Ece Board Exam 89Document1 pageImg - 0051 MCQ Ece Board Exam 89Master JaguarPas encore d'évaluation
- Chogyur Dechen Lingpa - Tukdrub Thinley NyingpoDocument34 pagesChogyur Dechen Lingpa - Tukdrub Thinley NyingpoSamuel LongPas encore d'évaluation
- Robert Fox and William Henry ScottDocument3 pagesRobert Fox and William Henry ScottFrancis Xavier AlcazarPas encore d'évaluation
- 1012 20Document1 page1012 20shoyebPas encore d'évaluation
- Lines and Offset of Series 60Document10 pagesLines and Offset of Series 60gksahaPas encore d'évaluation
- 作業15Document3 pages作業15steven0627.ee11Pas encore d'évaluation
- Experiment 3Document3 pagesExperiment 3AAAAALLENNPas encore d'évaluation
- 5 Axis MachinesDocument33 pages5 Axis MachinesgsPas encore d'évaluation
- 1.7.1.h.2 HASIL PEMBINAANDocument1 page1.7.1.h.2 HASIL PEMBINAANpajakpkmlosarangPas encore d'évaluation
- TRIGONOMETRYDocument31 pagesTRIGONOMETRYAshwini MalavPas encore d'évaluation
- Macneils Oow Pocket BookDocument79 pagesMacneils Oow Pocket BooknarenPas encore d'évaluation
- Sima Gramatica Limbii Romane Prin Metode RapideDocument12 pagesSima Gramatica Limbii Romane Prin Metode RapideMihai MihaiPas encore d'évaluation
- 4° Semana A.e.ii Método de Compatibilidad en Placa (A) 051021Document24 pages4° Semana A.e.ii Método de Compatibilidad en Placa (A) 051021Carlo Herbozo PomaPas encore d'évaluation
- Muhammad Farkhan Fadhilah Sandy, S.Ak., Ak., ACPADocument2 pagesMuhammad Farkhan Fadhilah Sandy, S.Ak., Ak., ACPAMuhammad Farkhan Fadhilah SandyPas encore d'évaluation
- Balancing EquationsDocument30 pagesBalancing Equationswilliam.ongeri.tutoringPas encore d'évaluation
- Img - 0081 MCQ Ree Board Exam 151Document1 pageImg - 0081 MCQ Ree Board Exam 151Arwyn BermasPas encore d'évaluation
- Eagle, Ralph Fleischman, Musselman Section Experimental Therapeutics, National Institutes of Health, Bethesda ReceivedDocument19 pagesEagle, Ralph Fleischman, Musselman Section Experimental Therapeutics, National Institutes of Health, Bethesda ReceivedlorenaPas encore d'évaluation
- Deterministic Finite Automata: COMP2600 - Formal Methods For Software EngineeringDocument28 pagesDeterministic Finite Automata: COMP2600 - Formal Methods For Software EngineeringBlackk WorldzPas encore d'évaluation
- Robotics CH 4 Robot DynamicsDocument40 pagesRobotics CH 4 Robot DynamicsCharlette Alessi InaoPas encore d'évaluation
- Mathe HeftDocument2 pagesMathe Hefttomstevens2006Pas encore d'évaluation
- Img - 0135 MCQ Ece Board Exam 255Document1 pageImg - 0135 MCQ Ece Board Exam 255bnqr584bPas encore d'évaluation
- Latihan 6 (MSTT)Document8 pagesLatihan 6 (MSTT)wahyuPas encore d'évaluation
- Passat 6. Климатическая установка. На АЗС. В моторном отсеке. Стр. 279-330Document26 pagesPassat 6. Климатическая установка. На АЗС. В моторном отсеке. Стр. 279-330Manya SpasPas encore d'évaluation
- See 2 oDocument1 pageSee 2 omarc millisPas encore d'évaluation
- Ladang Simunjan - GRR SRR 2308-02 DD 29.08.23Document7 pagesLadang Simunjan - GRR SRR 2308-02 DD 29.08.23peic1988Pas encore d'évaluation
- Order Estimation of Markov ChainsDocument2 pagesOrder Estimation of Markov ChainsGiane HiginoPas encore d'évaluation
- Img - 0008 MCQ Ece Board Exam 3Document1 pageImg - 0008 MCQ Ece Board Exam 3Bugoy2023Pas encore d'évaluation
- Quiz 1Document2 pagesQuiz 1IndrajPas encore d'évaluation
- IMG - 0093 MCQ College Algebra 183Document1 pageIMG - 0093 MCQ College Algebra 183bnqr584bPas encore d'évaluation
- IMG - 0075 MCQ in Calculus 123Document1 pageIMG - 0075 MCQ in Calculus 123let ramPas encore d'évaluation
- MCSEM Test 2018 02 02 SolutionDocument6 pagesMCSEM Test 2018 02 02 Solutionthanuja gunasekharPas encore d'évaluation
- Angles On A Straight Line: Find The Measure of Each Indicated AngleDocument2 pagesAngles On A Straight Line: Find The Measure of Each Indicated AngleMaya LiusadyPas encore d'évaluation
- Maxime Rodinson - La Fascination de L'islam - 2003Document101 pagesMaxime Rodinson - La Fascination de L'islam - 2003BaldurPas encore d'évaluation
- L - Gse!: of U.E.E MissionDocument21 pagesL - Gse!: of U.E.E MissionRahul KumarPas encore d'évaluation
- The Calculation of Transmission Networks With The Aid of Graph TheoryDocument14 pagesThe Calculation of Transmission Networks With The Aid of Graph TheoryYANDRAPU MANOJ NAIDU 20MDT1017Pas encore d'évaluation
- EE I .J G:::: O9". O:itsDocument16 pagesEE I .J G:::: O9". O:itsTamim TalhaPas encore d'évaluation
- Guard RillDocument7 pagesGuard RillWahyu PasaribuPas encore d'évaluation
- 33iess Sasflea: 5ee EiDocument1 page33iess Sasflea: 5ee EiSwansea TriduaaPas encore d'évaluation
- ELEC212 Lect10Document7 pagesELEC212 Lect10evildoctorbluetoothPas encore d'évaluation
- CSE 460: Computabilty and Formal Languages: S. PramanikDocument20 pagesCSE 460: Computabilty and Formal Languages: S. PramanikTamiru FelekePas encore d'évaluation
- Constitution of The United States, 1825Document10 pagesConstitution of The United States, 1825John Sutherland100% (2)
- Pamfilos-On-RectangularDocument14 pagesPamfilos-On-RectangularKgmasterPas encore d'évaluation
- Table of Quantum Operators and Core CircuitsDocument3 pagesTable of Quantum Operators and Core CircuitsBraian De LeonPas encore d'évaluation
- Alpuerto Activity No. 1 HDLDocument1 pageAlpuerto Activity No. 1 HDL다나Pas encore d'évaluation
- Forarea Manuala A Puturilor de Apa. Tehnici Si Unelte de Lucru - Paul Sawyers PDFDocument6 pagesForarea Manuala A Puturilor de Apa. Tehnici Si Unelte de Lucru - Paul Sawyers PDFMircea LuicanPas encore d'évaluation
- T P P ' 1 1 ' ' y X y X : Homogeneous Representation of 2D TransformationsDocument3 pagesT P P ' 1 1 ' ' y X y X : Homogeneous Representation of 2D Transformationsvishwajeet patilPas encore d'évaluation
- Sequential LogicDocument56 pagesSequential LogicjusttacaptPas encore d'évaluation
- Sequential LogicDocument103 pagesSequential LogicjusttacaptPas encore d'évaluation
- Bernard D. Marquez Eduardo M. Axalan Engr. William A.L.T. NGDocument1 pageBernard D. Marquez Eduardo M. Axalan Engr. William A.L.T. NGRhon Nem KhoPas encore d'évaluation
- Mechanical Workshop Practice ReportDocument6 pagesMechanical Workshop Practice ReportMuhd AkmalPas encore d'évaluation
- Quality ControlDocument10 pagesQuality ControlSabbir AhmedPas encore d'évaluation
- Methods of Tube Expansion in Tube To TubDocument19 pagesMethods of Tube Expansion in Tube To Tubkurcek100% (1)
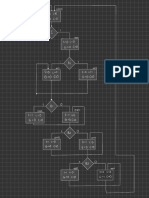
- Write An Algorithm and Flowchart For Computing The Average Number of The Default 4 NumbersDocument3 pagesWrite An Algorithm and Flowchart For Computing The Average Number of The Default 4 NumbersMark Jelan100% (1)
- Glass Inspection CriteriaDocument4 pagesGlass Inspection CriteriabatteekhPas encore d'évaluation
- Jacky Smith Resume Project ManagerDocument1 pageJacky Smith Resume Project ManagerGrey GrayPas encore d'évaluation
- Dogging Guide 2003 - WorkCover NSWDocument76 pagesDogging Guide 2003 - WorkCover NSWtadeumatas100% (1)
- Stock # Carbon Weight Burn Temp Puncture StrengthDocument8 pagesStock # Carbon Weight Burn Temp Puncture StrengthMintPas encore d'évaluation
- C12200Document3 pagesC12200xgiorg100% (1)
- Waqas Riaz: Total Years of Experience: 2 Years ObjectiveDocument2 pagesWaqas Riaz: Total Years of Experience: 2 Years ObjectiveIrfanPas encore d'évaluation
- Design For Manufacturing Course - by DFRDocument257 pagesDesign For Manufacturing Course - by DFRhlgc63100% (2)
- Doing Hot Work On Gas ShipDocument5 pagesDoing Hot Work On Gas ShipAnonymous icnhaNsFPas encore d'évaluation
- 2013 11 DUPLEX EasyDocument21 pages2013 11 DUPLEX EasyAnonymous HC0tWePas encore d'évaluation
- RT L2 General Examination PaperDocument4 pagesRT L2 General Examination PaperdaddadPas encore d'évaluation
- Selling Your Contents To The WorldDocument25 pagesSelling Your Contents To The WorldCreative Malaysia100% (1)
- Ain Tsila Development Main EPC Contract A-CNT-CON-000-00282 Subcontract N°: JI-2045/07-002BDocument15 pagesAin Tsila Development Main EPC Contract A-CNT-CON-000-00282 Subcontract N°: JI-2045/07-002BAslaouiPas encore d'évaluation
- EN RotomaticDocument4 pagesEN RotomaticnajeerwPas encore d'évaluation
- Module002 LaboratoryExercise002Document2 pagesModule002 LaboratoryExercise002Joaquin SmithPas encore d'évaluation
- Measurement Advisory Committee Summary - Attachment 3Document70 pagesMeasurement Advisory Committee Summary - Attachment 3MauricioICQPas encore d'évaluation
- Q3 NSP - SLP - RLPDocument41 pagesQ3 NSP - SLP - RLPRushi RavalPas encore d'évaluation
- BM 81004 MuvDocument52 pagesBM 81004 MuvHamza Abbasi AbbasiPas encore d'évaluation
- Receiving Material Procedure (Done) (Sudah Direvisi)Document8 pagesReceiving Material Procedure (Done) (Sudah Direvisi)Hardika SambilangPas encore d'évaluation
- Determination of The Solubility Product Constant of Silver AcetateDocument8 pagesDetermination of The Solubility Product Constant of Silver AcetateSara Al AzemPas encore d'évaluation
- Applying Six Sigma at 3MDocument13 pagesApplying Six Sigma at 3MdchPas encore d'évaluation
- EMOC 208 Installation of VITT For N2 Cylinder FillingDocument12 pagesEMOC 208 Installation of VITT For N2 Cylinder Fillingtejcd1234Pas encore d'évaluation
- Deep Web Research and Discovery Resources 2019 by Marcus P. Zillman, M.S., A.M.H.A.Document67 pagesDeep Web Research and Discovery Resources 2019 by Marcus P. Zillman, M.S., A.M.H.A.Tina CleoPas encore d'évaluation
- Asme Wec Chapter Annual ReportDocument12 pagesAsme Wec Chapter Annual ReportManazar HussainPas encore d'évaluation
- 06-901 Keyed Input SwitchesDocument4 pages06-901 Keyed Input Switchesmajed al.madhajiPas encore d'évaluation
- Honeywell P7640B1032 Differential Pressure Sensors PDFDocument2 pagesHoneywell P7640B1032 Differential Pressure Sensors PDFMarcello PorrinoPas encore d'évaluation