Vous aimerez peut-être aussi
- Apendix ADocument1 pageApendix ASadashiw PatilPas encore d'évaluation
- Recognition of Competent Person Under SMPV 0Document6 pagesRecognition of Competent Person Under SMPV 0Sadashiw PatilPas encore d'évaluation
- Risk MGMT Thrugh Process ApproachDocument1 pageRisk MGMT Thrugh Process ApproachSadashiw PatilPas encore d'évaluation
- Safety Goggles 1) Sure Safety 1.1) 3M Indoor - Outdoor Safety EyewearDocument2 pagesSafety Goggles 1) Sure Safety 1.1) 3M Indoor - Outdoor Safety EyewearSadashiw PatilPas encore d'évaluation
- Refractory Inspection-3Document2 pagesRefractory Inspection-3Sadashiw PatilPas encore d'évaluation
- Project Quality ManagementDocument4 pagesProject Quality ManagementSadashiw PatilPas encore d'évaluation
- EOI For Competent Persons Under SMPV (U) Rules 2016Document2 pagesEOI For Competent Persons Under SMPV (U) Rules 2016Sadashiw PatilPas encore d'évaluation
- The Static and Mobile Pressure VesselsDocument28 pagesThe Static and Mobile Pressure VesselsSadashiw PatilPas encore d'évaluation
- Boilers and Hrsgs 171: Fig. 7.4 Pressure ConversionsDocument1 pageBoilers and Hrsgs 171: Fig. 7.4 Pressure ConversionsSadashiw PatilPas encore d'évaluation
- Pressure Conversion PDFDocument1 pagePressure Conversion PDFSadashiw Patil100% (1)
- 04 Welding Consumables Control (Welder)Document1 page04 Welding Consumables Control (Welder)Sadashiw PatilPas encore d'évaluation
- Determination of Necessary Preheating Temperature in Steel WeldingDocument7 pagesDetermination of Necessary Preheating Temperature in Steel WeldingKelvin LabarezPas encore d'évaluation
- Metric UnitsDocument47 pagesMetric UnitsSadashiw PatilPas encore d'évaluation
- Company ProfileDocument9 pagesCompany ProfileSadashiw PatilPas encore d'évaluation
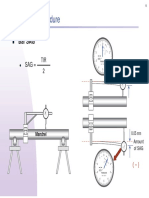
- Dail Indicator Shaft Alignment (Sag)Document3 pagesDail Indicator Shaft Alignment (Sag)Sadashiw PatilPas encore d'évaluation
- Travel Camera Comparison TableDocument1 pageTravel Camera Comparison TableSadashiw Patil0% (1)
- Pressure Vessel Plate InspectionDocument5 pagesPressure Vessel Plate InspectionSadashiw PatilPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Arduino Water Flow Sensor CodeDocument6 pagesArduino Water Flow Sensor CodeNasruddin AVPas encore d'évaluation
- Century Lookbook CatalogueDocument162 pagesCentury Lookbook Cataloguefwd2datta50% (2)
- Boston Matrix of CokeDocument11 pagesBoston Matrix of CokeIrvin A. OsnayaPas encore d'évaluation
- MSupply BuilderDocument21 pagesMSupply BuilderRohan BagadiyaPas encore d'évaluation
- Reference Letter of DR Zaka EmadDocument2 pagesReference Letter of DR Zaka EmadRMRE UETPas encore d'évaluation
- Underwater Wireless CommunicationDocument18 pagesUnderwater Wireless CommunicationNeelasha Baa100% (1)
- Shyla Jennings Ebook FinalDocument17 pagesShyla Jennings Ebook FinalChye Yong HockPas encore d'évaluation
- E DPT2020Document37 pagesE DPT2020arjuna naibahoPas encore d'évaluation
- Backup Exec 12.5 AVVIDocument6 pagesBackup Exec 12.5 AVVIcharanjit_singhPas encore d'évaluation
- 01 IK IESYS e Communications OverviewDocument12 pages01 IK IESYS e Communications OverviewHernando AlborPas encore d'évaluation
- Error Rateio NorunDocument725 pagesError Rateio Norunmatheus felipePas encore d'évaluation
- Pinhole Camera InformationDocument4 pagesPinhole Camera InformationD'ferti AnggraeniPas encore d'évaluation
- Changes in Bash Version 4.2 To Bash 4.3Document123 pagesChanges in Bash Version 4.2 To Bash 4.3LordAjaxPas encore d'évaluation
- QP Cluster Manager PDFDocument31 pagesQP Cluster Manager PDFkanisha2014Pas encore d'évaluation
- S11ES Ig 16Document4 pagesS11ES Ig 16allanrnmanalotoPas encore d'évaluation
- API Valves: A. API Gate Valves B. Mud Gate Valves C. API Plug ValvesDocument15 pagesAPI Valves: A. API Gate Valves B. Mud Gate Valves C. API Plug Valveskaveh-bahiraeePas encore d'évaluation
- Chiller: Asian Paints Khandala PlantDocument19 pagesChiller: Asian Paints Khandala PlantAditiPas encore d'évaluation
- ACI Concrete International Vol 45 No 8 2023Document76 pagesACI Concrete International Vol 45 No 8 2023Cristopher TenorioPas encore d'évaluation
- Sub Station ReportDocument43 pagesSub Station ReportSithartha SouryaPas encore d'évaluation
- Manual Operacion Compresores de AireDocument204 pagesManual Operacion Compresores de AireHugo RodriguezPas encore d'évaluation
- Aalco StocklistDocument36 pagesAalco StocklistjsfscibdPas encore d'évaluation
- AssignmentDocument2 pagesAssignmentPhước ĐặngPas encore d'évaluation
- Summer SLS 1103 SyllabusDocument22 pagesSummer SLS 1103 SyllabusJay100% (1)
- 2004 ATRA Seminar Manual ContentsDocument316 pages2004 ATRA Seminar Manual Contentschoco84100% (2)
- Auto Chassis NotesDocument90 pagesAuto Chassis Notesanishsukumar000gmailcomPas encore d'évaluation
- JournalDocument13 pagesJournalAnonymous 1uwOEpe5w8Pas encore d'évaluation
- M8JZ47Document5 pagesM8JZ47Leo GuillermoPas encore d'évaluation
- Bank of AmericaDocument3 pagesBank of AmericamortensenkPas encore d'évaluation
- Hfe Panasonic Sa-Akx50 PH PN Service enDocument132 pagesHfe Panasonic Sa-Akx50 PH PN Service enJohntec nuñezPas encore d'évaluation
- Miqro Vaporizer Owners ManualDocument36 pagesMiqro Vaporizer Owners ManualJuan Pablo AragonPas encore d'évaluation