Vous aimerez peut-être aussi
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesD'EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesPas encore d'évaluation
- 38 KV, 16 Ka, 1200 A: OVR-38 Outdoor Vacuum Recloser Instruction ManualDocument70 pages38 KV, 16 Ka, 1200 A: OVR-38 Outdoor Vacuum Recloser Instruction ManualTetianaPas encore d'évaluation
- Info Iec62271-203 (Ed1.0) en DDocument11 pagesInfo Iec62271-203 (Ed1.0) en DdvamseeramPas encore d'évaluation
- A Newton Optimal Power Flow Program For Ontario Hydro EMSDocument7 pagesA Newton Optimal Power Flow Program For Ontario Hydro EMSFlores JesusPas encore d'évaluation
- Electrical Common Functionality User GuideDocument226 pagesElectrical Common Functionality User GuideZhao XuanPas encore d'évaluation
- Electrical Engineer User GuideDocument387 pagesElectrical Engineer User GuideZhao XuanPas encore d'évaluation
- Ref615 - Hbfnaeagnhalbmg11gDocument1 pageRef615 - Hbfnaeagnhalbmg11gMahyar MashayekhiPas encore d'évaluation
- airOS UGDocument148 pagesairOS UGPlamenPas encore d'évaluation
- Indice de Relay'sDocument16 pagesIndice de Relay'shectorhscPas encore d'évaluation
- BBP344 Led3600 WW 36W 20D 100-240VDocument2 pagesBBP344 Led3600 WW 36W 20D 100-240VJosue CastroPas encore d'évaluation
- Assignment AASTUDocument1 pageAssignment AASTUAwol Abdu100% (1)
- My Very First LoveDocument1 pageMy Very First LoveKarina EcayPas encore d'évaluation
- ANSI MV Recloser Quick Reference Guide 7SR224 Three-Phase enDocument4 pagesANSI MV Recloser Quick Reference Guide 7SR224 Three-Phase enlast730Pas encore d'évaluation
- Power Transformer Design, Manufacturing and TestingDocument19 pagesPower Transformer Design, Manufacturing and TestingAbd ALRahmanPas encore d'évaluation
- Wm-E1 2g DB Gsm-Gprs Modem Inst Config v1 2 0 4wDocument18 pagesWm-E1 2g DB Gsm-Gprs Modem Inst Config v1 2 0 4wCristina AntohiPas encore d'évaluation
- 4 - Power Quality Problems - Part IIIIDocument17 pages4 - Power Quality Problems - Part IIIISari M.I100% (1)
- EPQS Multifunction Meter User ManualDocument36 pagesEPQS Multifunction Meter User Manualiskandarn_el5735Pas encore d'évaluation
- Manual de Operaciones-MK9Config 3 Instrukcja 3.1.8.7 enDocument34 pagesManual de Operaciones-MK9Config 3 Instrukcja 3.1.8.7 enInnovación TECHPas encore d'évaluation
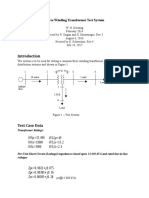
- Three Winding Transformer Test System-EPRI-2017-Rev4Document18 pagesThree Winding Transformer Test System-EPRI-2017-Rev4Jorge TorresPas encore d'évaluation
- L PRO 2100 ManualDocument306 pagesL PRO 2100 ManualEduardo ZamoranoPas encore d'évaluation
- Sensitivity of Transient Stability Critical Clearing TimeDocument12 pagesSensitivity of Transient Stability Critical Clearing Timedr.Sabita shresthaPas encore d'évaluation
- Du-Elc - 202004-Diagrama UnifilarDocument1 pageDu-Elc - 202004-Diagrama UnifilarHubert Kennedy Pérez MonteroPas encore d'évaluation
- Mie10170 Drts XX User-Manual Rev1.33Document512 pagesMie10170 Drts XX User-Manual Rev1.33Slobodan SavicPas encore d'évaluation
- General Catalog LenoirElecDocument164 pagesGeneral Catalog LenoirElecjipix7850% (2)
- Growatt 1000-S Dan 1500-S Inverter DatasheetDocument2 pagesGrowatt 1000-S Dan 1500-S Inverter DatasheetJoshua Immanuel GaniPas encore d'évaluation
- Superimposed Components Based Sub-Cycle Protection of Transmission LinesDocument6 pagesSuperimposed Components Based Sub-Cycle Protection of Transmission LinesFabien CallodPas encore d'évaluation
- Service Manual RAINBOW 180E EnglishDocument54 pagesService Manual RAINBOW 180E EnglishJaroslaw BrzozowskiPas encore d'évaluation
- Schneider Electric REACh Project UpdateDocument2 pagesSchneider Electric REACh Project UpdateAleksandarPas encore d'évaluation
- Line Installation and Protective Equipment Overhead Specifiers Guide Br100008enDocument120 pagesLine Installation and Protective Equipment Overhead Specifiers Guide Br100008enPolano SpiridionPas encore d'évaluation
- 01 - SVC PLUS - DECRETO422 - Class Room Training - Principle - of - Operation Rev0Document46 pages01 - SVC PLUS - DECRETO422 - Class Room Training - Principle - of - Operation Rev0Rita jofréPas encore d'évaluation
- Essential Differences Between IEC 60909 and ANSIIEEE C37 SeriesDocument4 pagesEssential Differences Between IEC 60909 and ANSIIEEE C37 Seriesyeprem82Pas encore d'évaluation
- Sa Akx92 PDFDocument157 pagesSa Akx92 PDFfjeroPas encore d'évaluation
- FREJA300-306-Win5 4 UG en V03Document204 pagesFREJA300-306-Win5 4 UG en V03apofviewPas encore d'évaluation
- Modelo de Relé MhoDocument5 pagesModelo de Relé MhoRaidson AlencarPas encore d'évaluation
- LG 42ls3400 42ls340y PDFDocument42 pagesLG 42ls3400 42ls340y PDFMaria de Guerrero100% (1)
- CODocument18 pagesCObauhaus10Pas encore d'évaluation
- Session03 Ground ImpedanceDocument60 pagesSession03 Ground ImpedancekunhalparikhPas encore d'évaluation
- 25 Ohms Ground Resistance HistoryDocument3 pages25 Ohms Ground Resistance HistoryBen E100% (1)
- Ficha Tecnica Panel Solar Jinko280WpDocument2 pagesFicha Tecnica Panel Solar Jinko280WpJair SaavedraPas encore d'évaluation
- ASHIDA Numerical 3OC Protection RelayDocument17 pagesASHIDA Numerical 3OC Protection RelayNamrata ShettiPas encore d'évaluation
- máy cắt sf6 abbDocument7 pagesmáy cắt sf6 abbQuảng Thành NamPas encore d'évaluation
- CIGRE 2006: High-current switching protective equipment in capacitor banksDocument9 pagesCIGRE 2006: High-current switching protective equipment in capacitor bankscarlos vidalPas encore d'évaluation
- Ekor - RPS: Multifunctional Protection Unit Volume 1 of 3Document144 pagesEkor - RPS: Multifunctional Protection Unit Volume 1 of 3Mayrita M Rojas100% (1)
- Direct Quadrate D-Q Modeling of 3-Phase PDFDocument7 pagesDirect Quadrate D-Q Modeling of 3-Phase PDFRuchir Pandey HSET, SRHUPas encore d'évaluation
- Liebert NX UPS: Installation Manual-10-30kVA, 208V, 60HzDocument80 pagesLiebert NX UPS: Installation Manual-10-30kVA, 208V, 60HzUzziel MaguePas encore d'évaluation
- Synchronizing devices and systems data sheetDocument1 pageSynchronizing devices and systems data sheetŽarko Močnik100% (1)
- Fluke+PM6685,+PM6685R+Prog +Frequency+Counter PDFDocument94 pagesFluke+PM6685,+PM6685R+Prog +Frequency+Counter PDFtaryoPas encore d'évaluation
- Smart x835 DatasheetDocument4 pagesSmart x835 DatasheetBeni SetiawanPas encore d'évaluation
- Color Codes and Irregular MarkingDocument354 pagesColor Codes and Irregular MarkingOscarGonzalezPas encore d'évaluation
- 0613CT0001 PDFDocument180 pages0613CT0001 PDFhimanshu yadavPas encore d'évaluation
- Principles of Overvoltage Protection and Insulation Coordination of Lines and Substations of PSE S.A.Document42 pagesPrinciples of Overvoltage Protection and Insulation Coordination of Lines and Substations of PSE S.A.Ayanangshu ChakrabartyPas encore d'évaluation
- MATPOWER Manual PDFDocument140 pagesMATPOWER Manual PDFcupidarunPas encore d'évaluation
- Voltage Sag Analysis Case Studies: JonesDocument7 pagesVoltage Sag Analysis Case Studies: JonesJofred Dela VegaPas encore d'évaluation
- Voltage Sag Analysis Case StudiesDocument7 pagesVoltage Sag Analysis Case Studiesmonirul_ahmedPas encore d'évaluation
- Measuring and Analyzing Voltage FlickerDocument5 pagesMeasuring and Analyzing Voltage FlickerGustavo AguayoPas encore d'évaluation
- Calculate SCCRDocument17 pagesCalculate SCCRsimonPas encore d'évaluation
- DF PMSMDocument9 pagesDF PMSMmohamed omarPas encore d'évaluation
- Chapter 7 Directional OcDocument10 pagesChapter 7 Directional OcTana AzeezPas encore d'évaluation
- Distribution Substation and Reliability AnalysisDocument5 pagesDistribution Substation and Reliability Analysisjoseph5689Pas encore d'évaluation
- Fault Diagnosis AC BY Current Park'S: Drives, The Average Vector ApproachDocument3 pagesFault Diagnosis AC BY Current Park'S: Drives, The Average Vector Approachnadji mohPas encore d'évaluation
- 04 Generic Method NDZ DetectionDocument5 pages04 Generic Method NDZ Detectionjwsmith60Pas encore d'évaluation
- United States Patent: (75) Inventors: Robert E. Morris, Viola, ID (US)Document19 pagesUnited States Patent: (75) Inventors: Robert E. Morris, Viola, ID (US)jwsmith60Pas encore d'évaluation
- Evaluation of Impedance Parameters in Transmission LinesDocument72 pagesEvaluation of Impedance Parameters in Transmission Linesjwsmith60Pas encore d'évaluation
- Evaluation of Impedance Parameters in Transmission LinesDocument72 pagesEvaluation of Impedance Parameters in Transmission Linesjwsmith60Pas encore d'évaluation
- C37.110 Guide For The Application of Current TX Used For Protective Relaying PurposeDocument4 pagesC37.110 Guide For The Application of Current TX Used For Protective Relaying Purposeluhusapa100% (1)
- AC Transmission Line Model Parameter ValidationDocument50 pagesAC Transmission Line Model Parameter ValidationWilber Lucas100% (1)
- C37.110 Guide For The Application of Current TX Used For Protective Relaying PurposeDocument4 pagesC37.110 Guide For The Application of Current TX Used For Protective Relaying Purposeluhusapa100% (1)
- IEEE C37guide For Power SystemDocument124 pagesIEEE C37guide For Power SystemJohn Bihag100% (2)
- Evaluation of Impedance Parameters in Transmission LinesDocument72 pagesEvaluation of Impedance Parameters in Transmission Linesjwsmith60Pas encore d'évaluation
- Electric Power Generation TransmissionDocument14 pagesElectric Power Generation Transmissionsilambuonnet100% (1)
- 5.3L EngineDocument832 pages5.3L EnginevixentdPas encore d'évaluation
- AC Transmission Line Model Parameter ValidationDocument50 pagesAC Transmission Line Model Parameter ValidationWilber Lucas100% (1)
- Encyclopedia of Grounding PDFDocument123 pagesEncyclopedia of Grounding PDFjwsmith60Pas encore d'évaluation
- Power Transformer Inrush CurrentDocument10 pagesPower Transformer Inrush CurrentDulon22Pas encore d'évaluation
- Network Equivalent Models For Short Circuit Analysis: 0-7803-7322-7/02/$17.00 (C) 2002 IEEEDocument4 pagesNetwork Equivalent Models For Short Circuit Analysis: 0-7803-7322-7/02/$17.00 (C) 2002 IEEEjwsmith60Pas encore d'évaluation
- Unbalance Currents PDFDocument7 pagesUnbalance Currents PDFjwsmith60Pas encore d'évaluation
- 97IPST032Document5 pages97IPST032jwsmith60Pas encore d'évaluation
- Cold Load Pick Up TheoryDocument30 pagesCold Load Pick Up TheoryhendrexPas encore d'évaluation
- 7 1 Fourier SeriesDocument48 pages7 1 Fourier Seriesjwsmith60Pas encore d'évaluation
- Demographics: County Profile Granville County (NC) April 2017Document4 pagesDemographics: County Profile Granville County (NC) April 2017jwsmith60Pas encore d'évaluation
- Bench Harness TutorialDocument17 pagesBench Harness Tutorialjwsmith60100% (1)
- Electric Motors - Energy Efficiency Reference Guide - CEATI PDFDocument166 pagesElectric Motors - Energy Efficiency Reference Guide - CEATI PDFjwsmith60Pas encore d'évaluation
- Model Based Fault Locating Algorithm for Distribution SystemsDocument194 pagesModel Based Fault Locating Algorithm for Distribution Systemsjwsmith60Pas encore d'évaluation
- 3 Bus Power FlowDocument13 pages3 Bus Power FlowRakesh PandaPas encore d'évaluation
- Encyclopedia of GroundingDocument123 pagesEncyclopedia of Groundingjwsmith60Pas encore d'évaluation
- Joining Instruction 4 Years 22 23Document11 pagesJoining Instruction 4 Years 22 23Salmini ShamtePas encore d'évaluation
- DBMS Architecture FeaturesDocument30 pagesDBMS Architecture FeaturesFred BloggsPas encore d'évaluation
- Baobab MenuDocument4 pagesBaobab Menuperseverence mahlamvanaPas encore d'évaluation
- Essential Rendering BookDocument314 pagesEssential Rendering BookHelton OliveiraPas encore d'évaluation
- Correlation Degree Serpentinization of Source Rock To Laterite Nickel Value The Saprolite Zone in PB 5, Konawe Regency, Southeast SulawesiDocument8 pagesCorrelation Degree Serpentinization of Source Rock To Laterite Nickel Value The Saprolite Zone in PB 5, Konawe Regency, Southeast SulawesimuqfiPas encore d'évaluation
- 100 Training Games - Kroehnert, GaryDocument180 pages100 Training Games - Kroehnert, GarywindsorccPas encore d'évaluation
- 4 Influencing Factors of Learners Career Choice Parents Choice Vs Personal DescisionDocument24 pages4 Influencing Factors of Learners Career Choice Parents Choice Vs Personal Descisionmatteo mamaloPas encore d'évaluation
- Annual Plan 1st GradeDocument3 pagesAnnual Plan 1st GradeNataliaMarinucciPas encore d'évaluation
- Key Fact Sheet (HBL FreedomAccount) - July 2019 PDFDocument1 pageKey Fact Sheet (HBL FreedomAccount) - July 2019 PDFBaD cHaUhDrYPas encore d'évaluation
- OS LabDocument130 pagesOS LabSourav BadhanPas encore d'évaluation
- Srimanta Sankaradeva Universityof Health SciencesDocument3 pagesSrimanta Sankaradeva Universityof Health SciencesTemple RunPas encore d'évaluation
- Anti Jamming of CdmaDocument10 pagesAnti Jamming of CdmaVishnupriya_Ma_4804Pas encore d'évaluation
- Laryngeal Diseases: Laryngitis, Vocal Cord Nodules / Polyps, Carcinoma LarynxDocument52 pagesLaryngeal Diseases: Laryngitis, Vocal Cord Nodules / Polyps, Carcinoma LarynxjialeongPas encore d'évaluation
- EIRA v0.8.1 Beta OverviewDocument33 pagesEIRA v0.8.1 Beta OverviewAlexQuiñonesNietoPas encore d'évaluation
- Basic Features of The Microcredit Regulatory Authority Act, 2006Document10 pagesBasic Features of The Microcredit Regulatory Authority Act, 2006Asif Hasan DhimanPas encore d'évaluation
- Inborn Errors of Metabolism in Infancy: A Guide To DiagnosisDocument11 pagesInborn Errors of Metabolism in Infancy: A Guide To DiagnosisEdu Diaperlover São PauloPas encore d'évaluation
- Assignment Gen PsyDocument3 pagesAssignment Gen PsyHelenPas encore d'évaluation
- Dance Appreciation and CompositionDocument1 pageDance Appreciation and CompositionFretz Ael100% (1)
- ArDocument26 pagesArSegunda ManoPas encore d'évaluation
- Excess AirDocument10 pagesExcess AirjkaunoPas encore d'évaluation
- CENG 5503 Intro to Steel & Timber StructuresDocument37 pagesCENG 5503 Intro to Steel & Timber StructuresBern Moses DuachPas encore d'évaluation
- Service Manual: Precision SeriesDocument32 pagesService Manual: Precision SeriesMoises ShentePas encore d'évaluation
- Statistical Decision AnalysisDocument3 pagesStatistical Decision AnalysisTewfic SeidPas encore d'évaluation
- Guide To Raising Capital From Angel Investors Ebook From The Startup Garage PDFDocument20 pagesGuide To Raising Capital From Angel Investors Ebook From The Startup Garage PDFLars VonTurboPas encore d'évaluation
- Mpu 2312Document15 pagesMpu 2312Sherly TanPas encore d'évaluation
- Condition Based Monitoring System Using IoTDocument5 pagesCondition Based Monitoring System Using IoTKaranMuvvalaRaoPas encore d'évaluation
- Assembly ModelingDocument222 pagesAssembly ModelingjdfdfererPas encore d'évaluation
- France Winckler Final Rev 1Document14 pagesFrance Winckler Final Rev 1Luciano Junior100% (1)
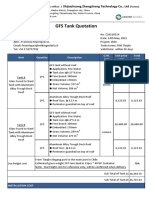
- GFS Tank Quotation C20210514Document4 pagesGFS Tank Quotation C20210514Francisco ManriquezPas encore d'évaluation
- Tutorial 1 Discussion Document - Batch 03Document4 pagesTutorial 1 Discussion Document - Batch 03Anindya CostaPas encore d'évaluation