Vous aimerez peut-être aussi
- TFM RobertoSanchezGarcia PDFDocument147 pagesTFM RobertoSanchezGarcia PDFLuigi OrtiɀPas encore d'évaluation
- TFM RobertoSanchezGarcia PDFDocument147 pagesTFM RobertoSanchezGarcia PDFLuigi OrtiɀPas encore d'évaluation
- Momentos de inercia geométricasDocument2 pagesMomentos de inercia geométricasChris HePas encore d'évaluation
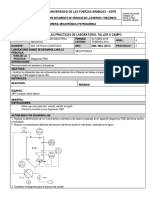
- 6 Practica 2 PDFDocument2 pages6 Practica 2 PDFLuigi OrtiɀPas encore d'évaluation
- Términos máximos y mínimos en sistemas digitalesDocument3 pagesTérminos máximos y mínimos en sistemas digitalesLuigi OrtiɀPas encore d'évaluation
- Trabajo 1. Ejercicios EMU8086Document5 pagesTrabajo 1. Ejercicios EMU8086Luigi OrtiɀPas encore d'évaluation
- Apendice EzfuerzosDocument4 pagesApendice EzfuerzosLuigi OrtiɀPas encore d'évaluation
- Informe2 P IDDocument13 pagesInforme2 P IDLuigi OrtiɀPas encore d'évaluation
- Consulta InerciaDocument6 pagesConsulta InerciaLuigi OrtiɀPas encore d'évaluation
- Máquinas Eléctricas y Transformadores-GuruDocument716 pagesMáquinas Eléctricas y Transformadores-GuruLuigi OrtiɀPas encore d'évaluation
- Soldadura 8Document12 pagesSoldadura 8Luigi OrtiɀPas encore d'évaluation
- Teoria de Maquinas y MecanismosDocument12 pagesTeoria de Maquinas y MecanismosEdgar ReyesPas encore d'évaluation
- Consulta Centrales de Generación Del EcuadorDocument11 pagesConsulta Centrales de Generación Del EcuadorLuigi OrtiɀPas encore d'évaluation
- Formato para Presentar PrácticaDocument4 pagesFormato para Presentar PrácticaLuigi OrtiɀPas encore d'évaluation
- Informe Teorema de ReciprocidadDocument19 pagesInforme Teorema de ReciprocidadLuigi Ortiɀ100% (1)
- Formulario Trigonometria PDFDocument3 pagesFormulario Trigonometria PDFLuigi OrtiɀPas encore d'évaluation
- Informe Circuitos Lab1Document2 pagesInforme Circuitos Lab1Luigi OrtiɀPas encore d'évaluation
- Flujo de Fondos Exel Entrada A CajaDocument6 pagesFlujo de Fondos Exel Entrada A CajaLuigi OrtiɀPas encore d'évaluation
- CV Nataly Aracely Ortiz Armendariz.8989Document3 pagesCV Nataly Aracely Ortiz Armendariz.8989Luigi OrtiɀPas encore d'évaluation
- Informe Circuitos Lab1Document2 pagesInforme Circuitos Lab1Luigi OrtiɀPas encore d'évaluation
- Piskunov - Calculo Diferencial e Integral Tomo 1 PDFDocument62 pagesPiskunov - Calculo Diferencial e Integral Tomo 1 PDFferPas encore d'évaluation
- Turbocompresor Luigi MEJORADODocument3 pagesTurbocompresor Luigi MEJORADOLuigi OrtiɀPas encore d'évaluation
- TecnologoDocument10 pagesTecnologoLuigi OrtiɀPas encore d'évaluation
- Portadas v2.0Document3 pagesPortadas v2.0Luigi OrtiɀPas encore d'évaluation
- La Parteria en Mexico ATLDocument17 pagesLa Parteria en Mexico ATLMaryam Farah Cruz AguilarPas encore d'évaluation
- Guía Proceso de EscrituraDocument2 pagesGuía Proceso de EscrituraSebastián Pröschle AntinopayPas encore d'évaluation
- Computación Cuántica MonografiaDocument12 pagesComputación Cuántica MonografiaLaura Osorio67% (3)
- Requerimientos de Espacios AuxiliaresDocument22 pagesRequerimientos de Espacios AuxiliaresbarluisburPas encore d'évaluation
- Rubrica para Discurso OralDocument8 pagesRubrica para Discurso OralDoris Gonzales Briceño67% (6)
- 7 Herramientas de CalidadDocument37 pages7 Herramientas de CalidadIsabel BriceñoPas encore d'évaluation
- 1.la ComunicaciónDocument2 pages1.la ComunicaciónDeNis Sanchez AyquipaPas encore d'évaluation
- Formatos de Hojas de ControlDocument7 pagesFormatos de Hojas de ControlEsteban Huamani RojasPas encore d'évaluation
- BDL300IPARTEDocument57 pagesBDL300IPARTEAlex FrancoPas encore d'évaluation
- Geotecnia Formacion y Origen de Las RocaDocument40 pagesGeotecnia Formacion y Origen de Las RocaAnto Salcedo GonzalesPas encore d'évaluation
- Filosofia Del Derecho - Juan Manuel Teran - 1Document12 pagesFilosofia Del Derecho - Juan Manuel Teran - 1Oscar FizPas encore d'évaluation
- Proyecto Mecanica de FluidosDocument20 pagesProyecto Mecanica de FluidosEder Parada PisciottyPas encore d'évaluation
- HIPOTESISDocument5 pagesHIPOTESISANGIE VALENTINA GUERRERO JAIMES100% (1)
- WatsonDocument5 pagesWatsonMayerlin SorianoPas encore d'évaluation
- Rol de Las FanbDocument3 pagesRol de Las Fanbannie100% (3)
- DESARROLLO PSICOMOTORDocument17 pagesDESARROLLO PSICOMOTORClaudia ElizethPas encore d'évaluation
- Medicion y Comparacion-1Document29 pagesMedicion y Comparacion-1Mario EnriquezPas encore d'évaluation
- La Biblioteca AulicaDocument3 pagesLa Biblioteca AulicaMaria Fandiño100% (1)
- Fieldhouse - Economía e ImperioDocument6 pagesFieldhouse - Economía e Imperiojessiesamojluk100% (4)
- Guia P Problemas de AlcoholDocument119 pagesGuia P Problemas de AlcoholEDUARDO HERNANDEZ RAMIREZ100% (1)
- El Departamento de Sistemas.Document7 pagesEl Departamento de Sistemas.Raymart AlvaradoPas encore d'évaluation
- Text GobDocument36 pagesText GobGabriel Fabricio Rojas SalazarPas encore d'évaluation
- Archivos BinariosDocument12 pagesArchivos BinariosPatriciaIsabelPas encore d'évaluation
- ESTRATEGIAS COGNITIVAS Y CONDUCTUALES PARA EL MIEDO ESCÉNICODocument131 pagesESTRATEGIAS COGNITIVAS Y CONDUCTUALES PARA EL MIEDO ESCÉNICObergajoPas encore d'évaluation
- TareaDocument20 pagesTareaLcda. Luz GranadosPas encore d'évaluation
- Hernandez y Couso. Código Penal Comentado PDFDocument383 pagesHernandez y Couso. Código Penal Comentado PDFCatalina Fernández Carter100% (1)
- Argumento de Enfermedad Mental y Personalidad de FoucaultDocument6 pagesArgumento de Enfermedad Mental y Personalidad de FoucaultRa UcPas encore d'évaluation
- Mapa Conceptual - Filosofia - Grupo 2Document5 pagesMapa Conceptual - Filosofia - Grupo 2Nelly Margarita Delgado SilvaPas encore d'évaluation