Vous aimerez peut-être aussi
- Cfm56 Training Manual LufthansaDocument322 pagesCfm56 Training Manual LufthansaStefan GergenenovPas encore d'évaluation
- Automatic Flight Control SystemsDocument610 pagesAutomatic Flight Control Systemsyouarewiner95% (22)
- ATA 32-Landing Gear DIFF R26Document81 pagesATA 32-Landing Gear DIFF R26NadirPas encore d'évaluation
- Madrigal Azevedo/Karina MRS: 04 Mar 2023 11 Mar 2023 Trip To Cancun, MexicoDocument3 pagesMadrigal Azevedo/Karina MRS: 04 Mar 2023 11 Mar 2023 Trip To Cancun, MexicoGinna SofiaPas encore d'évaluation
- ATA 25 - 737 NG B1 B2 Equip and FurnishingDocument53 pagesATA 25 - 737 NG B1 B2 Equip and FurnishingTharrmaselan manimaran100% (4)
- VOMMDocument62 pagesVOMMfresh_pearliePas encore d'évaluation
- Large Capacity Supercritical SetsDocument55 pagesLarge Capacity Supercritical Setsbidyut100100% (5)
- Understanding Downhole Tractors: Gulf Coast Section, SPE Northside, December 12, 2000Document24 pagesUnderstanding Downhole Tractors: Gulf Coast Section, SPE Northside, December 12, 2000southernorPas encore d'évaluation
- Servo 2012-01Document84 pagesServo 2012-01Fabien Gokucorp100% (1)
- A Conflict Resolution Approach Using Prioritization StrategyDocument6 pagesA Conflict Resolution Approach Using Prioritization Strategynicolae adrian DincaPas encore d'évaluation
- Application of Genetic Algorithms in The Aerospace Domain: H.H. Hesselink, H. Kuiper and J.M. Van Den AkkerDocument8 pagesApplication of Genetic Algorithms in The Aerospace Domain: H.H. Hesselink, H. Kuiper and J.M. Van Den AkkerPhani Kumar.bPas encore d'évaluation
- A Novel 3D Geometric Algorithm For Aircraft Autonomous Collision AvoidanceDocument6 pagesA Novel 3D Geometric Algorithm For Aircraft Autonomous Collision AvoidanceAnonymous t5MrKaXDPas encore d'évaluation
- Conflict Detection and Resolution in Air Traffic Management Based On Graph Coloring Problem Using Imperialist Competitive AlgorithmDocument16 pagesConflict Detection and Resolution in Air Traffic Management Based On Graph Coloring Problem Using Imperialist Competitive AlgorithmijitcajournalPas encore d'évaluation
- An LP Based Approximate Dynamic Programming ModelDocument20 pagesAn LP Based Approximate Dynamic Programming Modelsourav singhPas encore d'évaluation
- Airspace Sector Redesign Based On VoronoiDocument15 pagesAirspace Sector Redesign Based On Voronoiodic2002Pas encore d'évaluation
- Congestion Management 6Document8 pagesCongestion Management 6Anonymous TJRX7CPas encore d'évaluation
- A Linear Time and Space Algorithm For Optimal Traffic-Signal Duration at An IntersectionDocument9 pagesA Linear Time and Space Algorithm For Optimal Traffic-Signal Duration at An Intersectionnaumanhaider007Pas encore d'évaluation
- 0A Abeynayake Datcom ValidationDocument7 pages0A Abeynayake Datcom ValidationstewelsPas encore d'évaluation
- Applied Soft Computing Journal: Asma M. Altabeeb, Abdulqader M. Mohsen, Laith Abualigah, Abdullatif GhallabDocument20 pagesApplied Soft Computing Journal: Asma M. Altabeeb, Abdulqader M. Mohsen, Laith Abualigah, Abdullatif GhallabAbdulqader MohsenPas encore d'évaluation
- An Improved Ant Colony Algorithm and Its ApplicatiDocument10 pagesAn Improved Ant Colony Algorithm and Its ApplicatiI n T e R e Y ePas encore d'évaluation
- Research Article: Application of Improved Particle Swarm Optimization in Vehicle CrashworthinessDocument11 pagesResearch Article: Application of Improved Particle Swarm Optimization in Vehicle CrashworthinessFreddy OrlandoPas encore d'évaluation
- Trajectory Optimization of Space Maneuver Vehicle-2017Document14 pagesTrajectory Optimization of Space Maneuver Vehicle-2017Josue DelcidPas encore d'évaluation
- A Hybrid Ant Algorithm For The Airline CrewDocument11 pagesA Hybrid Ant Algorithm For The Airline CrewTatan BattagliaPas encore d'évaluation
- Fast-Time Simulation Evaluation of A Conflict Resolution Algorithm Under High Air Traffic DemandDocument15 pagesFast-Time Simulation Evaluation of A Conflict Resolution Algorithm Under High Air Traffic DemandAdrian DincaPas encore d'évaluation
- Ubiquitous Computing and Communication Journal Ready Paper 239 239Document7 pagesUbiquitous Computing and Communication Journal Ready Paper 239 239Usman TariqPas encore d'évaluation
- 10.optimal Transmission p.71-76 17july2010Document6 pages10.optimal Transmission p.71-76 17july2010huamanahuiPas encore d'évaluation
- Path Planning of Unmanned Aerial Vehicles Using Game TheoryDocument11 pagesPath Planning of Unmanned Aerial Vehicles Using Game TheoryInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Probabilistic Complexity in Support of AirspaceDocument10 pagesProbabilistic Complexity in Support of Airspaceodic2002Pas encore d'évaluation
- Citation Distributed MPC For Multi-Vehicle Systems Moving in FormationDocument12 pagesCitation Distributed MPC For Multi-Vehicle Systems Moving in FormationTony Y.Pas encore d'évaluation
- The General Comparison Between AIMD and AIAD Congestion Control AlgorithmsDocument8 pagesThe General Comparison Between AIMD and AIAD Congestion Control Algorithmseditor_ijarcssePas encore d'évaluation
- Comparison of Parallel Genetic Algorithm andDocument10 pagesComparison of Parallel Genetic Algorithm andNAENWI YAABARIPas encore d'évaluation
- 2015 - IJFTE - Ahmed BodyDocument7 pages2015 - IJFTE - Ahmed BodyMehul BambhaniaPas encore d'évaluation
- Solving Difficult Multicommodity Problems With A Specialized Interior-Point AlgorithmDocument14 pagesSolving Difficult Multicommodity Problems With A Specialized Interior-Point AlgorithmnarendraPas encore d'évaluation
- An Optimal 3D Analytical Solution For Collision Avoidance Between AircraftDocument9 pagesAn Optimal 3D Analytical Solution For Collision Avoidance Between AircraftAnonymous t5MrKaXDPas encore d'évaluation
- Minimum-Time - Consensus-Based - Approach - For - Power - SystemDocument11 pagesMinimum-Time - Consensus-Based - Approach - For - Power - SystemDavid FanaiPas encore d'évaluation
- Landing Route Planning Method For Micro Drones Based On HybridDocument5 pagesLanding Route Planning Method For Micro Drones Based On HybridGhalidh ChoirPas encore d'évaluation
- Model-Based Traffic Control For Balanced Reduction of Fuel Consumption, Emissions, and Travel TimeDocument6 pagesModel-Based Traffic Control For Balanced Reduction of Fuel Consumption, Emissions, and Travel TimeFlavio Vilca pintoPas encore d'évaluation
- Cooperative Distributed Robust Trajectory Optimization Using Receding Horizon Milp, TCST.2010.2045501Document9 pagesCooperative Distributed Robust Trajectory Optimization Using Receding Horizon Milp, TCST.2010.2045501Mehmed BrkićPas encore d'évaluation
- Optimization of Cost and Emission For Dynamic Load Dispatch Problem With Hybrid Renewable Energy SourcesDocument33 pagesOptimization of Cost and Emission For Dynamic Load Dispatch Problem With Hybrid Renewable Energy Sourcessrinivasa acharyaPas encore d'évaluation
- 2159-Article Text-2524-1-10-20080906Document16 pages2159-Article Text-2524-1-10-20080906jousuke higashikataPas encore d'évaluation
- UAV Path Planning Based On Receding Horizon Control With Adaptive StrategyDocument5 pagesUAV Path Planning Based On Receding Horizon Control With Adaptive StrategySofia KaramitsianiPas encore d'évaluation
- Congestion Management Using Genetic Algorithm in DDocument6 pagesCongestion Management Using Genetic Algorithm in DmuqthiarPas encore d'évaluation
- Population Metaheuristics To Solve The Professional Staff Transportation ProblemDocument15 pagesPopulation Metaheuristics To Solve The Professional Staff Transportation ProblemkofiomariPas encore d'évaluation
- A Multi-Objective Vehicle Routing Problem Using Dominant Rank MethodDocument6 pagesA Multi-Objective Vehicle Routing Problem Using Dominant Rank MethodLYDIA SETIAWANPas encore d'évaluation
- Tactical Conflict Detection and Resolution in A 3-D AirspaceDocument10 pagesTactical Conflict Detection and Resolution in A 3-D AirspaceAdrian DincaPas encore d'évaluation
- Aerodynamics of Solar CarsDocument4 pagesAerodynamics of Solar CarsNeil WuPas encore d'évaluation
- Airline Disruptive ManagementDocument8 pagesAirline Disruptive Managementsaif ur rehman shahid hussain (aviator)Pas encore d'évaluation
- Automated Conflict Resolution For Air Traffic ContDocument28 pagesAutomated Conflict Resolution For Air Traffic ContAdrian DincaPas encore d'évaluation
- Solving Area Coverage Problem With Uavs: A Vehicle Routing With Time Windows VariationDocument20 pagesSolving Area Coverage Problem With Uavs: A Vehicle Routing With Time Windows VariationDeepak KushwahaPas encore d'évaluation
- Comparison Between Solidworks and Ansys CFX FlowsDocument6 pagesComparison Between Solidworks and Ansys CFX FlowsAbbas Amirifard100% (1)
- Decentralized Model Predictive Control of Cooperating Uavs: Arthur Richards and Jonathan HowDocument6 pagesDecentralized Model Predictive Control of Cooperating Uavs: Arthur Richards and Jonathan HowjamestppPas encore d'évaluation
- Automated Conflict Resolution For Air Traffic Control: So Fer Hzv.2 Not Beeeii Tested Imdei-I-EalisiicDocument3 pagesAutomated Conflict Resolution For Air Traffic Control: So Fer Hzv.2 Not Beeeii Tested Imdei-I-Ealisiicnicolae adrian DincaPas encore d'évaluation
- Cuckoo Search Algorithm For Capacitated Vehicle Routing ProblemDocument9 pagesCuckoo Search Algorithm For Capacitated Vehicle Routing Problem-Ayomi Sii Sasmito-Pas encore d'évaluation
- GPU-Based Parameterized NMPC Scheme For Control of Half Car Vehicle With Semi-Active Suspension SystemDocument6 pagesGPU-Based Parameterized NMPC Scheme For Control of Half Car Vehicle With Semi-Active Suspension SystemBRIDGET AUHPas encore d'évaluation
- Unsupervised Aircraft Trajectories Clustering: A Minimum Entropy ApproachDocument7 pagesUnsupervised Aircraft Trajectories Clustering: A Minimum Entropy Approachgeorgez111Pas encore d'évaluation
- Manifolds in Costing ProjectDocument13 pagesManifolds in Costing ProjectAbraham JyothimonPas encore d'évaluation
- AIAA SDM 2015 Paper KierDocument13 pagesAIAA SDM 2015 Paper KierAnmar Hamid AliPas encore d'évaluation
- Genetic Algorithms, Function Optimization, and Facility Layout DesignDocument25 pagesGenetic Algorithms, Function Optimization, and Facility Layout DesignAlptekin TorunPas encore d'évaluation
- Chopped Random Basis Quantum Optimization: PACS NumbersDocument10 pagesChopped Random Basis Quantum Optimization: PACS NumbersgomariosPas encore d'évaluation
- Applied Soft Computing: Quoc Bao Diep, Thanh Cong Truong, Swagatam Das, Ivan ZelinkaDocument17 pagesApplied Soft Computing: Quoc Bao Diep, Thanh Cong Truong, Swagatam Das, Ivan ZelinkaPrashanthPas encore d'évaluation
- Hybrid Discrete Particle Swarm Optimization Algorithm For Capacitated Vehicle Routing ProblemDocument8 pagesHybrid Discrete Particle Swarm Optimization Algorithm For Capacitated Vehicle Routing ProblemSyifani RahmaniaPas encore d'évaluation
- Line Planning 3Document11 pagesLine Planning 3Darlyn LCPas encore d'évaluation
- Computers & Industrial Engineering: SciencedirectDocument12 pagesComputers & Industrial Engineering: SciencedirectNurul InzanyPas encore d'évaluation
- A Geometric Approach To Strategic Conflict Detection and ResolutionDocument11 pagesA Geometric Approach To Strategic Conflict Detection and ResolutionAdrian DincaPas encore d'évaluation
- Dynamics and Design Genetic by Algorithm Optimization Coupling Computational Fluid Dynamics and Genetic AlgorithmDocument14 pagesDynamics and Design Genetic by Algorithm Optimization Coupling Computational Fluid Dynamics and Genetic AlgorithmBrian Quintero ArboledaPas encore d'évaluation
- Two-Layer Obstacle Collision Avoidance With Machine Learning For More Energy-Efficient Unmanned Aircraft TrajectoriesDocument16 pagesTwo-Layer Obstacle Collision Avoidance With Machine Learning For More Energy-Efficient Unmanned Aircraft TrajectoriesMarcelo RodriguesPas encore d'évaluation
- Expert Systems With Applications: Lorena Pradenas, Boris Oportus, Víctor ParadaDocument7 pagesExpert Systems With Applications: Lorena Pradenas, Boris Oportus, Víctor ParadaFelipe Rodríguez RojasPas encore d'évaluation
- Computational Geometry: Exploring Geometric Insights for Computer VisionD'EverandComputational Geometry: Exploring Geometric Insights for Computer VisionPas encore d'évaluation
- A Review of Conflict Detection and Resolution Modeling MethodsDocument11 pagesA Review of Conflict Detection and Resolution Modeling MethodsAdrian DincaPas encore d'évaluation
- Conflict Detection and Resolution in The PresenceDocument20 pagesConflict Detection and Resolution in The PresenceAdrian DincaPas encore d'évaluation
- Automated Conflict Resolution For Air Traffic ContDocument28 pagesAutomated Conflict Resolution For Air Traffic ContAdrian DincaPas encore d'évaluation
- Caa-Ac-gen029 RVSM Advisory CircularDocument13 pagesCaa-Ac-gen029 RVSM Advisory CircularAdrian DincaPas encore d'évaluation
- Experimental Performance of A Genetic Algorithm For Airborne Strategic Conflict ResolutionDocument15 pagesExperimental Performance of A Genetic Algorithm For Airborne Strategic Conflict ResolutionAdrian DincaPas encore d'évaluation
- Tactical Conflict Detection and Resolution in A 3-D AirspaceDocument10 pagesTactical Conflict Detection and Resolution in A 3-D AirspaceAdrian DincaPas encore d'évaluation
- Fast-Time Simulation Evaluation of A Conflict Resolution Algorithm Under High Air Traffic DemandDocument15 pagesFast-Time Simulation Evaluation of A Conflict Resolution Algorithm Under High Air Traffic DemandAdrian DincaPas encore d'évaluation
- Cued Control 950Document19 pagesCued Control 950Adrian DincaPas encore d'évaluation
- Vela Adan e 201112 PHDDocument187 pagesVela Adan e 201112 PHDAdrian DincaPas encore d'évaluation
- V Add I Concept 2011Document25 pagesV Add I Concept 2011Adrian DincaPas encore d'évaluation
- Conflict Detection and Alerting For Separation Assurance SystemsDocument8 pagesConflict Detection and Alerting For Separation Assurance SystemsAdrian DincaPas encore d'évaluation
- A Geometric Approach To Strategic Conflict Detection and ResolutionDocument11 pagesA Geometric Approach To Strategic Conflict Detection and ResolutionAdrian DincaPas encore d'évaluation
- Formal Verification of An Optimal Air Traffic Conflict Resolution and Recovery AlgorithmDocument12 pagesFormal Verification of An Optimal Air Traffic Conflict Resolution and Recovery AlgorithmAdrian DincaPas encore d'évaluation
- LeNy Pappas ATC10 FixSchedulingDocument6 pagesLeNy Pappas ATC10 FixSchedulingAdrian DincaPas encore d'évaluation
- Geometric Algorithms For Conflict Detection/Resolution in Air Traffic ManagementDocument7 pagesGeometric Algorithms For Conflict Detection/Resolution in Air Traffic ManagementAdrian DincaPas encore d'évaluation
- The Display of Uncertainty Information On The Controller Working PositionDocument10 pagesThe Display of Uncertainty Information On The Controller Working PositionAdrian DincaPas encore d'évaluation
- Rules-Based Study of Conflicts Detection and Resolution in RampsDocument4 pagesRules-Based Study of Conflicts Detection and Resolution in RampsAdrian DincaPas encore d'évaluation
- Design of A Lateral Motion Controller For A Small Unmanned Aerial Vehicle (SUAV)Document6 pagesDesign of A Lateral Motion Controller For A Small Unmanned Aerial Vehicle (SUAV)Adrian DincaPas encore d'évaluation
- 534 640 PDFDocument6 pages534 640 PDFAdrian DincaPas encore d'évaluation
- Chapter 13Document58 pagesChapter 13Adrian DincaPas encore d'évaluation
- Gas Tables v2Document12 pagesGas Tables v2Nobara KugisakiPas encore d'évaluation
- Gaslands Refuelled DashboardsDocument3 pagesGaslands Refuelled DashboardsOrdo MonstrumPas encore d'évaluation
- Blender With Open FoamDocument25 pagesBlender With Open FoamstyleworkerPas encore d'évaluation
- Chapter 12 Bow Thruster: American Tug 34 Owner ExperiencesDocument5 pagesChapter 12 Bow Thruster: American Tug 34 Owner ExperiencesAnonymous YCQmM6xJN4Pas encore d'évaluation
- Transportation Engineering Ii: Classification and Axle Loading of Commercial VehiclesDocument13 pagesTransportation Engineering Ii: Classification and Axle Loading of Commercial VehicleskKhalid YousafPas encore d'évaluation
- Wave MotionDocument32 pagesWave Motionanoopanu1990Pas encore d'évaluation
- Compressors: Department of Education and Science of UkraineDocument18 pagesCompressors: Department of Education and Science of UkraineAzmah EskandriPas encore d'évaluation
- Kalpana ChawlaDocument5 pagesKalpana ChawlaSamarth ParmarPas encore d'évaluation
- n189 Rs SystemsDocument2 pagesn189 Rs SystemsEmrehan KocamışPas encore d'évaluation
- Pad21 055 CNDocument2 pagesPad21 055 CNsaid_1234Pas encore d'évaluation
- Tutorial Sheet (ME324) 2018-19Document1 pageTutorial Sheet (ME324) 2018-19Asif SadarPas encore d'évaluation
- Silabus Avleg-1Document4 pagesSilabus Avleg-1hanif sqPas encore d'évaluation
- Routefinder: Online Flight PlannerDocument2 pagesRoutefinder: Online Flight PlannerRAdE0nEXEPas encore d'évaluation
- ATR - Fiche42 600S 3 PDFDocument2 pagesATR - Fiche42 600S 3 PDFDimitra Eirini DiamantidouPas encore d'évaluation
- A Pilot's Life in Active Service From 1930-1955Document14 pagesA Pilot's Life in Active Service From 1930-1955Austin Macauley Publishers Ltd.Pas encore d'évaluation
- A Startup by IIT-Bombay Alumni Is Fuelling A Cheaper and Greener Way To Propel Satellites Into SpaceDocument4 pagesA Startup by IIT-Bombay Alumni Is Fuelling A Cheaper and Greener Way To Propel Satellites Into SpaceapndesaiPas encore d'évaluation
- Basics For 2 Way Cartridge Valves LI: ISO 7368 Size From 16 To 100Document4 pagesBasics For 2 Way Cartridge Valves LI: ISO 7368 Size From 16 To 100kaniappan sakthivelPas encore d'évaluation
- Air To SurfaceDocument7 pagesAir To SurfaceHVPas encore d'évaluation
- R1Q3 - How Astronauts Visualize Data 1Document29 pagesR1Q3 - How Astronauts Visualize Data 1Job Klyde CarisoPas encore d'évaluation
- SL Somos PerFORM Material Specifications PDFDocument2 pagesSL Somos PerFORM Material Specifications PDFTushar Prakash ChaudhariPas encore d'évaluation
- Advisory Circular: Subject: Precision Approach Path Indicator Harmonization With Instrument Landing SystemDocument10 pagesAdvisory Circular: Subject: Precision Approach Path Indicator Harmonization With Instrument Landing SystemmiguelangelcsPas encore d'évaluation
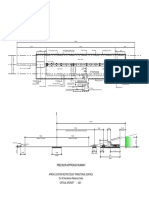
- New Airport Construction Standard 4C Precision Approach Runway Runway Strip Width: 300M Critical Aircraft: A321Document1 pageNew Airport Construction Standard 4C Precision Approach Runway Runway Strip Width: 300M Critical Aircraft: A321Sheena BautistaPas encore d'évaluation