Vous aimerez peut-être aussi
- 100 circuitos de shields para arduino (español)D'Everand100 circuitos de shields para arduino (español)Évaluation : 3.5 sur 5 étoiles3.5/5 (3)
- 100 Circuitos de Shields para MotoresD'Everand100 Circuitos de Shields para MotoresÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Programacion de Videojuegos SDLDocument19 pagesProgramacion de Videojuegos SDLAnonymous HPFUTT88% (8)
- Modos de Falla en Cadenas de RodillosDocument1 pageModos de Falla en Cadenas de RodillosSantiago Bonilla RiveraPas encore d'évaluation
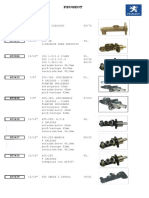
- PeugeotDocument30 pagesPeugeotאליהו אסתי אנדרדPas encore d'évaluation
- Prácticas de redes de datos e industrialesD'EverandPrácticas de redes de datos e industrialesÉvaluation : 4 sur 5 étoiles4/5 (5)
- Grupo 9 - Ejercicios de CargasDocument19 pagesGrupo 9 - Ejercicios de CargasCristian SG100% (2)
- Informe Analisis de Falla (Tubo)Document11 pagesInforme Analisis de Falla (Tubo)hendrickmazvargasPas encore d'évaluation
- Distalizadores IntraoralesDocument7 pagesDistalizadores IntraoralesMargarita Lopez Martinez100% (1)
- Introducción Al Psoc5Lp: Teoría y aplicaciones prácticaD'EverandIntroducción Al Psoc5Lp: Teoría y aplicaciones prácticaPas encore d'évaluation
- Practica Sensor de TemperaturaDocument11 pagesPractica Sensor de TemperaturaDanny Caisachana Ortiz50% (2)
- Carrito Seguidor de LineaDocument22 pagesCarrito Seguidor de LineaAlejandro RodriguezPas encore d'évaluation
- F. R. Shanley - Mecanica de Materiales PDFDocument485 pagesF. R. Shanley - Mecanica de Materiales PDFIsidro Gutierrez Pari100% (2)
- Practica 2 DSMDocument6 pagesPractica 2 DSMLuis Eduardo AndradePas encore d'évaluation
- Contador Óptico Reporte Proyecto Final PDFDocument9 pagesContador Óptico Reporte Proyecto Final PDFjohnlovecraftPas encore d'évaluation
- Clase 21-I2c PDFDocument54 pagesClase 21-I2c PDFJUAN ALARCON MACHETEPas encore d'évaluation
- Robot Sigue Líneas Con Arduino - CastillowikiDocument17 pagesRobot Sigue Líneas Con Arduino - Castillowikigeloandima1Pas encore d'évaluation
- Practica 3 TASDocument8 pagesPractica 3 TASAlejandro Galindo FuentesPas encore d'évaluation
- Simulación e Implementación de Un Radar de Onda Pulsada Utilizando Un Sensor UltrasónicoDocument20 pagesSimulación e Implementación de Un Radar de Onda Pulsada Utilizando Un Sensor UltrasónicoANTHONY HUAMANPas encore d'évaluation
- Servomecanismos AF6 Programación de Una Tarjeta para Servomotor.Document12 pagesServomecanismos AF6 Programación de Una Tarjeta para Servomotor.Edwin IsraelPas encore d'évaluation
- MEDIDOR RPMDocument8 pagesMEDIDOR RPMLuis BravoPas encore d'évaluation
- Diseño de Un Sistema de Exploración para Un RoverDocument16 pagesDiseño de Un Sistema de Exploración para Un RoverDaniel Elmer Parado SosaPas encore d'évaluation
- Robot Velocista Informe FinalDocument15 pagesRobot Velocista Informe FinalDanish PalaciosPas encore d'évaluation
- Clase 13 I2cDocument80 pagesClase 13 I2cDavid Alejandro Espejo GarciaPas encore d'évaluation
- Medidor RPMDocument8 pagesMedidor RPMLuis BravoPas encore d'évaluation
- Lab VDocument15 pagesLab VDennys Fernando CoralPas encore d'évaluation
- P6 DSM 1827471Document17 pagesP6 DSM 1827471Elan Gabriel Moreno SanchezPas encore d'évaluation
- Informe Laboratorio FINALDocument10 pagesInforme Laboratorio FINALMiguel GuarínPas encore d'évaluation
- Control de Ensayos en Maquina de Charpy Mediante Un GLCD y Un Teclado Matricial - para CombinarDocument11 pagesControl de Ensayos en Maquina de Charpy Mediante Un GLCD y Un Teclado Matricial - para CombinarCarlos CapillaPas encore d'évaluation
- Reporte Practica Monitoreo de Una Señal AnalogicaDocument12 pagesReporte Practica Monitoreo de Una Señal AnalogicaSaúl Altamirano BejaranoPas encore d'évaluation
- Informe Encoder Optico 1Document8 pagesInforme Encoder Optico 1Gustavo QuicaliquinPas encore d'évaluation
- Informe Encoder Chimbana LeninDocument8 pagesInforme Encoder Chimbana LeninJessica PilatasigPas encore d'évaluation
- Informe Encoder Medidor de RPMDocument8 pagesInforme Encoder Medidor de RPMDaniel Eduardo AnasiPas encore d'évaluation
- Paso 3Document11 pagesPaso 3Jimmy francoPas encore d'évaluation
- Brujula DigitalDocument6 pagesBrujula Digitaloskrsando4Pas encore d'évaluation
- Práctica 2 Electricidad Industrial UPIICSADocument15 pagesPráctica 2 Electricidad Industrial UPIICSAEdAlaman100% (1)
- Informe Guia (Invernadero)Document12 pagesInforme Guia (Invernadero)Lizeth VargasPas encore d'évaluation
- Osciloscopio iEEEDocument9 pagesOsciloscopio iEEEAdrian Feelx100% (1)
- Practica5 - Modo Manual Modo AutomáticoDocument15 pagesPractica5 - Modo Manual Modo AutomáticoHenry FloresPas encore d'évaluation
- EncoderDocument5 pagesEncoderWendy JimenezPas encore d'évaluation
- Informe VelocistaDocument13 pagesInforme VelocistaViera Navarro EinerPas encore d'évaluation
- Segundo Informe de RedesDocument15 pagesSegundo Informe de RedesZeus OmegaPas encore d'évaluation
- Preparatorio 1.3 Masabanda PachacamaDocument13 pagesPreparatorio 1.3 Masabanda PachacamaAndrés GmctPas encore d'évaluation
- Esquemadecodificacion Manchester IvanDanielCruzGarcia 11140862 PDFDocument13 pagesEsquemadecodificacion Manchester IvanDanielCruzGarcia 11140862 PDFIvanCgPas encore d'évaluation
- Preinforme 1Document11 pagesPreinforme 1Juan Manuel LópezPas encore d'évaluation
- Sensores Electrónicos para El Desarrollo de Mediciones en Un CoheteDocument8 pagesSensores Electrónicos para El Desarrollo de Mediciones en Un CoheteAaron Smith Fernández PizarroPas encore d'évaluation
- EncoderDocument13 pagesEncoderAlejandro Rodriguez100% (3)
- Lector de VelocidadDocument9 pagesLector de VelocidadCarlos quispe QuispePas encore d'évaluation
- Propuesta de PracticaDocument6 pagesPropuesta de PracticaKarla Stephany Fuentes HernandezPas encore d'évaluation
- Practica Motor EncoderDocument6 pagesPractica Motor EncoderAlex ParedesPas encore d'évaluation
- Resumen - Corte 2Document2 pagesResumen - Corte 2Daniela Gonzalez CasasPas encore d'évaluation
- Distancia Del Sensor de Sharp 2YOA21 y LCDDocument12 pagesDistancia Del Sensor de Sharp 2YOA21 y LCDniko098100% (1)
- Arduino Con LabViewDocument6 pagesArduino Con LabViewAndrew Israel QPas encore d'évaluation
- Proyecto Radar Deterctor Con Microcontrolador STM32Document7 pagesProyecto Radar Deterctor Con Microcontrolador STM32DecimePibeEspadaSiñaniPas encore d'évaluation
- Temporizador para RetrasosDocument13 pagesTemporizador para RetrasosJars SolorzanoPas encore d'évaluation
- Arduino Pantalla LCDDocument7 pagesArduino Pantalla LCDJOSE CAMPOSPas encore d'évaluation
- ProyectoDocument13 pagesProyectoPato BautistaPas encore d'évaluation
- Guia Metodologica Grupal Individual Byron CarreraDocument20 pagesGuia Metodologica Grupal Individual Byron CarreraAlejoCarreraPas encore d'évaluation
- Guía Práctica 5 Comunicación TTL y I2CDocument8 pagesGuía Práctica 5 Comunicación TTL y I2CPESQUERA ACUICOLAPas encore d'évaluation
- Reporte Proyecto U1, UlisesDocument24 pagesReporte Proyecto U1, UlisesVictor Manuel Caballero PerezPas encore d'évaluation
- Paper EncoderDocument9 pagesPaper EncoderKarla ConstanzaPas encore d'évaluation
- USB Entre PIC y MatlabDocument27 pagesUSB Entre PIC y MatlabpetroPas encore d'évaluation
- Reporte Practica 5Document13 pagesReporte Practica 5Juan Pablo HurtadoPas encore d'évaluation
- InformeDocument7 pagesInformeRODRIGO ALONZO VELASQUEZ FLORESPas encore d'évaluation
- PDF Contador Digital Informe Proyecto Final - Compress PDFDocument12 pagesPDF Contador Digital Informe Proyecto Final - Compress PDFLEYDA ORIANA CAYRO FLORESPas encore d'évaluation
- Sensor RoboticaDocument25 pagesSensor Roboticaalex yarlaque huamanPas encore d'évaluation
- Informe Proyecto POODocument7 pagesInforme Proyecto POOElian Andres Diaz VargasPas encore d'évaluation
- Estabilización de Suelos Con Jet Grouting - Mariana BernasconiDocument18 pagesEstabilización de Suelos Con Jet Grouting - Mariana BernasconiLorea ElvisPas encore d'évaluation
- FisicaDocument2 pagesFisicaXimena Zoé Tovar ChávezPas encore d'évaluation
- Propiedades Térmicas de La MateriaDocument12 pagesPropiedades Térmicas de La MateriaMayraSonccoPas encore d'évaluation
- Magnitud Física Símbolo Unidad SIDocument2 pagesMagnitud Física Símbolo Unidad SIBrandonRivasGiraldoPas encore d'évaluation
- CAJABLANCAV2Document28 pagesCAJABLANCAV2Didi DuartePas encore d'évaluation
- Anexo Tecnico Consultorios Jurídicos U Mariana PDFDocument23 pagesAnexo Tecnico Consultorios Jurídicos U Mariana PDFbrayan arley cortes tobarPas encore d'évaluation
- Maquinarías EspecialesDocument4 pagesMaquinarías EspecialesEdgar Raul Machaca MaytaPas encore d'évaluation
- Circuitos Electrónicos 1 Clase HDocument31 pagesCircuitos Electrónicos 1 Clase HPaolo Torreblanca LazoPas encore d'évaluation
- TDR Adecuación Infraestructura Polvorines.v2Document16 pagesTDR Adecuación Infraestructura Polvorines.v2Victor EduardoPas encore d'évaluation
- TranspocketDocument52 pagesTranspocketyalo24Pas encore d'évaluation
- Diagrama Hombre MaquinaDocument13 pagesDiagrama Hombre MaquinaMarta Troncoso BarbosaPas encore d'évaluation
- Comex River Sellador Nitrocelulosa Directo 1000Document2 pagesComex River Sellador Nitrocelulosa Directo 1000carpintador100% (1)
- El BencenoDocument26 pagesEl BencenoCarlos M. P. GonzálezPas encore d'évaluation
- Energia y Mantenimiento 2014 PDFDocument76 pagesEnergia y Mantenimiento 2014 PDFWilly HuaytaPas encore d'évaluation
- AT2 Motoniveladora 14MDocument6 pagesAT2 Motoniveladora 14MBeder Mauricio Cayatopa QuispePas encore d'évaluation
- Seguridad TSQL SQL Server 2008 PDFDocument49 pagesSeguridad TSQL SQL Server 2008 PDFvcotagPas encore d'évaluation
- Rac 337 Reparaciones Mayores o Alteraciones Mayores 2Document3 pagesRac 337 Reparaciones Mayores o Alteraciones Mayores 2baironman46Pas encore d'évaluation
- Guía de Actividades y Rúbrica de Evaluación - Tarea 4 - Práctica de LaboratorioDocument15 pagesGuía de Actividades y Rúbrica de Evaluación - Tarea 4 - Práctica de LaboratorioRichard Mejia Acevedo0% (1)
- Sistema de Abastecimiento de Agua para Altos Caudales (SAAC) - 2016 PDFDocument19 pagesSistema de Abastecimiento de Agua para Altos Caudales (SAAC) - 2016 PDFBauroPas encore d'évaluation
- Cuestionario Manual MsaDocument5 pagesCuestionario Manual MsaIsaias Fermin GonzalezPas encore d'évaluation
- Civil 10Document12 pagesCivil 10Diefo 69Pas encore d'évaluation
- 3 Bgu Fisica P1Q2Document8 pages3 Bgu Fisica P1Q2Gary CabezaPas encore d'évaluation
- Leyes Informaticas Todas PDFDocument38 pagesLeyes Informaticas Todas PDFAlfredo JosePas encore d'évaluation