Vous aimerez peut-être aussi
- PRIMA PARTE Dinamica e Misura Delle VibrazioniDocument59 pagesPRIMA PARTE Dinamica e Misura Delle VibrazioniFrancesco BuzzigoliPas encore d'évaluation
- C1 Lucidi Esperienza Molle 2014Document39 pagesC1 Lucidi Esperienza Molle 2014Paola CattozzoPas encore d'évaluation
- Elementi Di Dinamica Delle StruttureDocument67 pagesElementi Di Dinamica Delle Struttureaerospace1987Pas encore d'évaluation
- 04comp DinamicoDocument18 pages04comp Dinamicomarnik7000Pas encore d'évaluation
- MotoDocument10 pagesMotogigingPas encore d'évaluation
- Vibrazioni - Normative e DiagnosticaDocument60 pagesVibrazioni - Normative e DiagnosticaFrancesco TaliniPas encore d'évaluation
- PLV StruttureDocument10 pagesPLV StruttureNicola GianniniPas encore d'évaluation
- Prove Meccaniche Modulo ResistenzaDocument30 pagesProve Meccaniche Modulo Resistenzalmax53Pas encore d'évaluation
- Vibrazioni - Versione StampaDocument62 pagesVibrazioni - Versione Stampaperty92Pas encore d'évaluation
- SECONDA PARTE Riduzione Delle VibrazioniDocument79 pagesSECONDA PARTE Riduzione Delle Vibrazionimanzoni1Pas encore d'évaluation
- Meccanica Delle VibrazioniDocument50 pagesMeccanica Delle VibrazioniGiuseppe NapoliPas encore d'évaluation
- Introduzione Alla Fisica ModernaDocument113 pagesIntroduzione Alla Fisica Modernagiacomo19Pas encore d'évaluation
- PowerQuality e Armoniche - Comuzzi - 2006Document24 pagesPowerQuality e Armoniche - Comuzzi - 2006George VassilogluPas encore d'évaluation
- Progetto Del Telaio 007 Analisi Dinamica e Modale FEMDocument41 pagesProgetto Del Telaio 007 Analisi Dinamica e Modale FEMmariomatoPas encore d'évaluation
- Oscillatore Elasto PlasticoDocument7 pagesOscillatore Elasto PlasticoFabio LodoloPas encore d'évaluation
- Pendolo A TorsioneDocument10 pagesPendolo A TorsioneAnna MoriPas encore d'évaluation
- 2-Eq MotoDocument13 pages2-Eq Motoq_giovanniPas encore d'évaluation
- Lezione MR 04mag2021 - Teorema - Di - TorricelliDocument5 pagesLezione MR 04mag2021 - Teorema - Di - TorricelliAndrea MaglioPas encore d'évaluation
- Formulario Di Fisica PDFDocument19 pagesFormulario Di Fisica PDFSalvo LaudaniPas encore d'évaluation
- 001 Equilibrio e Reazioni VincolariDocument29 pages001 Equilibrio e Reazioni VincolariSamuele GramagliaPas encore d'évaluation
- 02 MCKDocument13 pages02 MCKLaura VignaPas encore d'évaluation
- Slides6 ElettrotecnicaDocument47 pagesSlides6 ElettrotecnicaAlessandro GambiniPas encore d'évaluation
- Vibrazioni Sistemi Ad Un GDLDocument28 pagesVibrazioni Sistemi Ad Un GDLGenPas encore d'évaluation
- La Quantità Di MotoDocument5 pagesLa Quantità Di MotoSamPas encore d'évaluation
- Costruzioni in Zona SismicaDocument76 pagesCostruzioni in Zona SismicaAlessandro RiposiPas encore d'évaluation
- 4 Dinamica-1Document12 pages4 Dinamica-1boom shakalakaPas encore d'évaluation
- Esercizi SvoltidinamicaDocument7 pagesEsercizi SvoltidinamicaIlaria figliuzziPas encore d'évaluation
- Analisi LimiteDocument44 pagesAnalisi LimiteMario ROSSIPas encore d'évaluation
- Goglio Comportamento Meccanico Dei MaterialiDocument102 pagesGoglio Comportamento Meccanico Dei MaterialiWilliam MoscaPas encore d'évaluation
- Equazioni CardinaliDocument25 pagesEquazioni CardinaliValerio Jackson MelucciPas encore d'évaluation
- Rumore 1Document22 pagesRumore 1Alessio LeredePas encore d'évaluation
- Elastomeri Ed ElasticitàDocument6 pagesElastomeri Ed ElasticitàGabriele GessatiPas encore d'évaluation
- Funicolare Rev1.1Document4 pagesFunicolare Rev1.1Michele BovomiPas encore d'évaluation
- Ritiro e ViscositàiDocument53 pagesRitiro e ViscositàiIvoGraziotinPas encore d'évaluation
- Moto ArmonicoDocument7 pagesMoto Armonicodebugger20Pas encore d'évaluation
- Macchine SincroneDocument28 pagesMacchine SincroneGianfrancesco FlorioPas encore d'évaluation
- Urti CollisioneDocument11 pagesUrti CollisioneCristian CafaroPas encore d'évaluation
- 03a Dinamica1-SP - Con NoteDocument40 pages03a Dinamica1-SP - Con NoteRossel DiazPas encore d'évaluation
- Relazione Chimica FisicaDocument14 pagesRelazione Chimica FisicaDavide LuisePas encore d'évaluation
- Lezione 15 PDFDocument36 pagesLezione 15 PDFAnonymous QRUEIaPas encore d'évaluation
- Push OverDocument12 pagesPush Overandrea_l1349Pas encore d'évaluation
- DISPENSE Di Controlli Automatici - G. MarroDocument40 pagesDISPENSE Di Controlli Automatici - G. MarroDomenico Rafti100% (1)
- HartreeDocument12 pagesHartreeioenopioPas encore d'évaluation
- Appunti MR 2Document20 pagesAppunti MR 2NelsonPas encore d'évaluation
- Pendolo A TorsioneDocument4 pagesPendolo A TorsioneAnna MoriPas encore d'évaluation
- 1 - Misure in Campo Biomedico - 4Document36 pages1 - Misure in Campo Biomedico - 4domenico pioPas encore d'évaluation
- Teoria Classica Di LorentzDocument13 pagesTeoria Classica Di LorentzFabio GraziosoPas encore d'évaluation
- LezioniMM 14 15a - 05 06.11.2020Document26 pagesLezioniMM 14 15a - 05 06.11.2020emmene frePas encore d'évaluation
- Il Moto Turbolento - Capitolo 9Document28 pagesIl Moto Turbolento - Capitolo 9Vincenzo PicozziPas encore d'évaluation
- Approsimazione ImpulsivaDocument48 pagesApprosimazione ImpulsivaMario RossiPas encore d'évaluation
- Oscillatore 1Document11 pagesOscillatore 1dariaPas encore d'évaluation
- Esercitazione 3-4Document10 pagesEsercitazione 3-4chiaraPas encore d'évaluation
- Bethe-Bloch FormulaDocument10 pagesBethe-Bloch Formulabigdrew89Pas encore d'évaluation
- Ottica FisicaDocument18 pagesOttica FisicaErmenegildo De La BeppaPas encore d'évaluation
- Oscillatori e OndeDocument64 pagesOscillatori e OndesirloraPas encore d'évaluation
- CDM UNINA Lecture1Document60 pagesCDM UNINA Lecture1CarloLucianiPas encore d'évaluation
- Mat Did 492491Document32 pagesMat Did 492491Gomblotto BotPas encore d'évaluation
- Esercizi Svolti DinamicaDocument7 pagesEsercizi Svolti Dinamicagiulia ColzaniPas encore d'évaluation
- Massa Modale EffettivaDocument7 pagesMassa Modale EffettivaFederica Di LupoPas encore d'évaluation
- 1 IntroduzioneFiltriDocument68 pages1 IntroduzioneFiltririccardoPas encore d'évaluation
- FiltriDocument31 pagesFiltririccardoPas encore d'évaluation
- Lezioni Di Teoria Musicale PDFDocument50 pagesLezioni Di Teoria Musicale PDFDanilo CiampronePas encore d'évaluation
- Tracker Help It PDFDocument92 pagesTracker Help It PDFriccardoPas encore d'évaluation
- Teo e Ling MusicaleDocument20 pagesTeo e Ling MusicalericcardoPas encore d'évaluation
- LagrangeDocument91 pagesLagrangericcardoPas encore d'évaluation
- Ec 11804Document23 pagesEc 11804Vincenzo Nocerino100% (2)
- Rigol Manuale Utente Oscilloscopio Digitale SerieDocument268 pagesRigol Manuale Utente Oscilloscopio Digitale SeriericcardoPas encore d'évaluation
- La Buona Scuola ApprofondimentiDocument30 pagesLa Buona Scuola ApprofondimentiPietro AloiPas encore d'évaluation
- Capsule User Guide NVLDocument40 pagesCapsule User Guide NVLriccardoPas encore d'évaluation
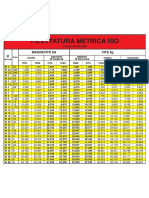
- Filettatura Metrica ISODocument1 pageFilettatura Metrica ISOriccardoPas encore d'évaluation
- PRIMA PARTE Dinamica e Misura Delle VibrazioniDocument59 pagesPRIMA PARTE Dinamica e Misura Delle VibrazioniriccardoPas encore d'évaluation
- Fisica Generale 2Document67 pagesFisica Generale 2riccardoPas encore d'évaluation
- Manuale Mach 3 ItalianoDocument175 pagesManuale Mach 3 ItalianoeFalegname100% (1)
- 1) DISPENSA CM2 Elastoplasticità - Danno - Strain Rate R 2016-10Document136 pages1) DISPENSA CM2 Elastoplasticità - Danno - Strain Rate R 2016-10riccardoPas encore d'évaluation
- Fisica Generale 2Document67 pagesFisica Generale 2riccardoPas encore d'évaluation
- Tecnologia Meccanica - 3.01 Deformazione PlasticaDocument283 pagesTecnologia Meccanica - 3.01 Deformazione PlasticariccardoPas encore d'évaluation
- Epistemologia Newton LagrangeDocument10 pagesEpistemologia Newton LagrangericcardoPas encore d'évaluation
- Seminario PS 2014Document57 pagesSeminario PS 2014riccardoPas encore d'évaluation
- MaterialiDocument18 pagesMaterialiMarta PalenzonaPas encore d'évaluation
- 08-Caratterizzazione Meccanica PDFDocument8 pages08-Caratterizzazione Meccanica PDFriccardoPas encore d'évaluation
- Tecnologia Meccanica - 3.01 Deformazione PlasticaDocument283 pagesTecnologia Meccanica - 3.01 Deformazione PlasticariccardoPas encore d'évaluation
- 05 Carichi Distribuiti PDFDocument26 pages05 Carichi Distribuiti PDFriccardoPas encore d'évaluation
- 08-Tensioni-Deformazioni .Rip. SdC. V1-4Document21 pages08-Tensioni-Deformazioni .Rip. SdC. V1-4marcopasottiPas encore d'évaluation
- 02 Punti CorpiRigidi PDFDocument16 pages02 Punti CorpiRigidi PDFriccardoPas encore d'évaluation
- 01 IntroduzioneDocument10 pages01 IntroduzionericcardoPas encore d'évaluation
- 09-Teorie Rottura .Rip. SdC. V1-4 PDFDocument16 pages09-Teorie Rottura .Rip. SdC. V1-4 PDFobertocPas encore d'évaluation
- 02 Punti CorpiRigidi PDFDocument16 pages02 Punti CorpiRigidi PDFriccardoPas encore d'évaluation
- 04 AzioniInterne PDFDocument11 pages04 AzioniInterne PDFriccardoPas encore d'évaluation
- Tecnaria v4Document2 pagesTecnaria v4Alessandro De FuscoPas encore d'évaluation
- Cap1 Prob SolDocument11 pagesCap1 Prob SolDennis AlexisPas encore d'évaluation
- Copia Di IL MOTO ARMONICODocument4 pagesCopia Di IL MOTO ARMONICODaniela MarkuPas encore d'évaluation
- Collegamenti - Simboli Numerici Dei Procedimenti Di Saldatura - (Da UNI 1310)Document1 pageCollegamenti - Simboli Numerici Dei Procedimenti Di Saldatura - (Da UNI 1310)fraPas encore d'évaluation
- Turbine Gas Presentazione TaccioliDocument23 pagesTurbine Gas Presentazione Taccioliflystudio3dPas encore d'évaluation