Vous aimerez peut-être aussi
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
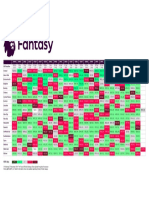
- FDR 2019 20 - V16Document1 pageFDR 2019 20 - V16AshutoshAparajPas encore d'évaluation
- Designer's Guide To EN 1997-1 Eurocode 7: Geotechnical Design - General RulesDocument15 pagesDesigner's Guide To EN 1997-1 Eurocode 7: Geotechnical Design - General RulesAshutoshAparajPas encore d'évaluation
- NIESR Election Briefing - The Macroeconomics of Parties' Tax and Spending PlansDocument8 pagesNIESR Election Briefing - The Macroeconomics of Parties' Tax and Spending PlansAshutoshAparajPas encore d'évaluation
- A Practical Look at Creep and Shrinkage in Bridge DesignDocument14 pagesA Practical Look at Creep and Shrinkage in Bridge DesignAshutoshAparajPas encore d'évaluation
- Aqua 1Document329 pagesAqua 1AshutoshAparajPas encore d'évaluation
- Thick Shell ElementDocument1 pageThick Shell ElementAshutoshAparajPas encore d'évaluation
- MaterialDocument161 pagesMaterialAshutoshAparajPas encore d'évaluation
- Arranged Love by Parul A Mittal in PDFDocument162 pagesArranged Love by Parul A Mittal in PDFAshutoshAparajPas encore d'évaluation
- Strut & Tie ModelDocument67 pagesStrut & Tie Modelahmed adel100% (9)
- Wood - ArmerDocument6 pagesWood - ArmerNovak Novaković100% (1)
- sp74 2007Document36 pagessp74 2007AshutoshAparajPas encore d'évaluation
- LUSAS Volume 2Document272 pagesLUSAS Volume 2AshutoshAparaj100% (1)
- Design of Prestressed Concrete Structures (3rd Edition) - T. Y. Lin & Ned H. Burns - 2Document326 pagesDesign of Prestressed Concrete Structures (3rd Edition) - T. Y. Lin & Ned H. Burns - 2Ahmed Al-Amri96% (23)
- Sofistik 1Document121 pagesSofistik 1AshutoshAparajPas encore d'évaluation
- MaterialDocument161 pagesMaterialAshutoshAparajPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- DNA Structure and Replication: Chapter Nine Khalid HussainDocument49 pagesDNA Structure and Replication: Chapter Nine Khalid HussainKhalid HussainPas encore d'évaluation
- Coca-Cola BeverageDocument17 pagesCoca-Cola BeverageMahmood SadiqPas encore d'évaluation
- Soil ResistivityDocument6 pagesSoil ResistivityAnonymous EP0GKhfPas encore d'évaluation
- Popis Na OK KoziDocument325 pagesPopis Na OK KoziViktor ArsovPas encore d'évaluation
- Analisis Perencanaan Rekrutmen Aparatur Sipil Negara Kabupaten Mamuju UtaraDocument11 pagesAnalisis Perencanaan Rekrutmen Aparatur Sipil Negara Kabupaten Mamuju UtarafitriPas encore d'évaluation
- Statistics For EconomicsDocument58 pagesStatistics For EconomicsKintu GeraldPas encore d'évaluation
- HGP Year End Report 2021-2022 NewDocument169 pagesHGP Year End Report 2021-2022 Newangelica sungaPas encore d'évaluation
- Confirmation 2Document11 pagesConfirmation 2حمزة دراغمةPas encore d'évaluation
- Differentialequations, Dynamicalsystemsandlinearalgebra Hirsch, Smale2Document186 pagesDifferentialequations, Dynamicalsystemsandlinearalgebra Hirsch, Smale2integrationbyparths671Pas encore d'évaluation
- Electrochemistry DPP-1Document2 pagesElectrochemistry DPP-1tarunPas encore d'évaluation
- Concept of InsuranceDocument4 pagesConcept of InsuranceNazrul HoquePas encore d'évaluation
- Review Women With Moustaches and Men Without Beards - Gender and Sexual Anxieties of Iranian Modernity PDFDocument3 pagesReview Women With Moustaches and Men Without Beards - Gender and Sexual Anxieties of Iranian Modernity PDFBilal SalaamPas encore d'évaluation
- Cognitive InfocommunicationsDocument229 pagesCognitive Infocommunicationsradhakodirekka8732Pas encore d'évaluation
- Lecture Notes 1 - Finance - Principles of Finance Lecture Notes 1 - Finance - Principles of FinanceDocument7 pagesLecture Notes 1 - Finance - Principles of Finance Lecture Notes 1 - Finance - Principles of FinanceKim Cristian MaañoPas encore d'évaluation
- Ev Conversion PDFDocument2 pagesEv Conversion PDFShannonPas encore d'évaluation
- Pex 03 02Document5 pagesPex 03 02aexillis0% (1)
- Dual Nature of Radiation and MatterDocument5 pagesDual Nature of Radiation and Mattercopadag753Pas encore d'évaluation
- Body Wash Base Guide Recipe PDFDocument2 pagesBody Wash Base Guide Recipe PDFTanmay PatelPas encore d'évaluation
- Request Please Only Students Who Are Willing To Join in Haryana in Any District Are Requested To Apply For JobDocument2 pagesRequest Please Only Students Who Are Willing To Join in Haryana in Any District Are Requested To Apply For JobUdayan KarnatakPas encore d'évaluation
- Intangible AssetsDocument16 pagesIntangible Assets566973801967% (3)
- Battle Group Builder + Commonwealth Infantry Roster - Wargames DesignDocument12 pagesBattle Group Builder + Commonwealth Infantry Roster - Wargames DesignPete PoliPas encore d'évaluation
- Personal Tutor: 11 + MATHS Test 6Document10 pagesPersonal Tutor: 11 + MATHS Test 6siddhant4uPas encore d'évaluation
- Welcome Speech For Seminar in College 2Document4 pagesWelcome Speech For Seminar in College 2Niño Jay C. GastonesPas encore d'évaluation
- PL SQL Exercise6Document2 pagesPL SQL Exercise6Nishant AndhalePas encore d'évaluation
- Osssc JR Clerk Odia Paper 2015 - 20171207 - 0001Document7 pagesOsssc JR Clerk Odia Paper 2015 - 20171207 - 0001songspk100Pas encore d'évaluation
- ACO 201 - (Section) - Spring 2021Document8 pagesACO 201 - (Section) - Spring 2021George BeainoPas encore d'évaluation
- CPM Pert Multiple Choice Questions and AnswersDocument2 pagesCPM Pert Multiple Choice Questions and Answersptarwatkar123Pas encore d'évaluation
- Airline and Airport Master - OdsDocument333 pagesAirline and Airport Master - OdsGiri KumarPas encore d'évaluation
- Sari Sari Store in Tabango Leyte The Business Growth and Its Marketing Practices 124 PDF FreeDocument11 pagesSari Sari Store in Tabango Leyte The Business Growth and Its Marketing Practices 124 PDF FreeJim Ashter Laude SalogaolPas encore d'évaluation
- Basic Customer Service SkillsDocument90 pagesBasic Customer Service SkillsGillian Delos ReyesPas encore d'évaluation