Vous aimerez peut-être aussi
- Modeling of Type 4 Wind Turbine Generators - UVIG Modeling WikiDocument11 pagesModeling of Type 4 Wind Turbine Generators - UVIG Modeling WikielchicogrisPas encore d'évaluation
- 5825 24808 1 PBDocument9 pages5825 24808 1 PBFelipe Esteban Guglielmi AsenjoPas encore d'évaluation
- A New Method of Maximum Power Point Tracking For DFIG Based Wind TurbineDocument7 pagesA New Method of Maximum Power Point Tracking For DFIG Based Wind Turbinebalaji06202Pas encore d'évaluation
- 13 Chapter 4Document37 pages13 Chapter 4Raj AryanPas encore d'évaluation
- Doubly-Fed Induction Machine Models For Stability Assessment of Wind FarmsDocument6 pagesDoubly-Fed Induction Machine Models For Stability Assessment of Wind FarmsArun RajendranPas encore d'évaluation
- MPC Paper-Ieee FormatDocument6 pagesMPC Paper-Ieee Formathemavathi114071Pas encore d'évaluation
- Simulation of DFIG Wind Turbines Ride Through CapabilityDocument9 pagesSimulation of DFIG Wind Turbines Ride Through CapabilityDanny LiPas encore d'évaluation
- 14 Power Output and Energy YieldDocument55 pages14 Power Output and Energy YieldHmaedPas encore d'évaluation
- Wind Energy Training Ch#4Document44 pagesWind Energy Training Ch#4Munseb AliPas encore d'évaluation
- Control of A Power Circuit Interface of A Flywheel-Based Energy Stor-Age SystemDocument6 pagesControl of A Power Circuit Interface of A Flywheel-Based Energy Stor-Age SystemSantiago Bonilla RiveraPas encore d'évaluation
- Transformer EfficiencyDocument8 pagesTransformer EfficiencyKrishnBhairavPas encore d'évaluation
- PEDS'01 Conference Proceedings Doubly-Fed Full-Controlled Induction Wind GeneratorDocument7 pagesPEDS'01 Conference Proceedings Doubly-Fed Full-Controlled Induction Wind Generatorrida1001Pas encore d'évaluation
- Paper 15Document13 pagesPaper 15RakeshconclavePas encore d'évaluation
- Unit CommDocument56 pagesUnit CommkgurumoorthiPas encore d'évaluation
- Electrical Braking of Large Wind TurbinesDocument11 pagesElectrical Braking of Large Wind Turbineslaaloo41Pas encore d'évaluation
- A Fuzzy-Logic Based MPPT Method For Stand-Alone Wind Turbine SystemDocument8 pagesA Fuzzy-Logic Based MPPT Method For Stand-Alone Wind Turbine SystemAJER JOURNALPas encore d'évaluation
- Modelling, Simulation and Analysis of Doubly Fed Induction Generator For Wind TurbinesDocument7 pagesModelling, Simulation and Analysis of Doubly Fed Induction Generator For Wind TurbinesskrtamilPas encore d'évaluation
- Matecconf 20153701048Document5 pagesMatecconf 20153701048Jordan YembangPas encore d'évaluation
- Maquinas de Corriente ContinuaDocument111 pagesMaquinas de Corriente ContinuaValentina Alzugaray BatallaPas encore d'évaluation
- A Master-Slave Fuzzy Logic Control SchemeDocument6 pagesA Master-Slave Fuzzy Logic Control SchemeFatih BurakPas encore d'évaluation
- MPPT Fuzzy Logic Controller for PMSG Wind TurbineDocument7 pagesMPPT Fuzzy Logic Controller for PMSG Wind TurbineHeather ClevelandPas encore d'évaluation
- DC Shunt Motor Exp7 PDFDocument10 pagesDC Shunt Motor Exp7 PDFGopinath B L NaiduPas encore d'évaluation
- Bog HoseDocument29 pagesBog HoseNadia BnPas encore d'évaluation
- Lab 11 - Capacitor Start and Capasitor Run MotorsDocument4 pagesLab 11 - Capacitor Start and Capasitor Run MotorscostpopPas encore d'évaluation
- Optimal PDFDocument6 pagesOptimal PDFjalilemadiPas encore d'évaluation
- Optimal Size Selection For Step Up TransDocument6 pagesOptimal Size Selection For Step Up Transle hoai NamPas encore d'évaluation
- Tuning Analysis For The High-Amplifier: Q Class-E PowerDocument6 pagesTuning Analysis For The High-Amplifier: Q Class-E PowersmarziehPas encore d'évaluation
- Design of A Wind Turbine Pitch Controller For Loads and Fatigue ReductionDocument10 pagesDesign of A Wind Turbine Pitch Controller For Loads and Fatigue ReductionperkusicmPas encore d'évaluation
- Generalized Dynamic and Steady State Analysis of Self Excited Induction (SEIG)Document6 pagesGeneralized Dynamic and Steady State Analysis of Self Excited Induction (SEIG)harisimpPas encore d'évaluation
- Benzen-2008-IEEE-ICSET Z-Source Inverter Based Wind Power Generation PDFDocument5 pagesBenzen-2008-IEEE-ICSET Z-Source Inverter Based Wind Power Generation PDFAnoop MathewPas encore d'évaluation
- Development of Wind Turbine Simulator For Generator Torque ControlDocument4 pagesDevelopment of Wind Turbine Simulator For Generator Torque ControlDadir AliPas encore d'évaluation
- Application of A Matrix Converter For The Power Control of A Variable-Speed Wind-Turbine Driving A Doubly-Fed Induction GeneratorDocument6 pagesApplication of A Matrix Converter For The Power Control of A Variable-Speed Wind-Turbine Driving A Doubly-Fed Induction GeneratorchetanPas encore d'évaluation
- Sam Williamson Modelling and Simulation of A Pico Hydropower Off Grid Network PDFDocument28 pagesSam Williamson Modelling and Simulation of A Pico Hydropower Off Grid Network PDFGabriel SimmerPas encore d'évaluation
- A Study of MPPT Schemes in PMSG Based Wind Turbine System: Joydeep Sarkar Prof. Shridhar S KhuleDocument6 pagesA Study of MPPT Schemes in PMSG Based Wind Turbine System: Joydeep Sarkar Prof. Shridhar S KhuleKhiem NguyenPas encore d'évaluation
- Power Maximization Control of Small Wind System Using Permanent Magnet Synchronous GeneratorDocument13 pagesPower Maximization Control of Small Wind System Using Permanent Magnet Synchronous GeneratorhassenbbPas encore d'évaluation
- Modelling and Simulation of Doubly Fed Induction Generator Varable Speed Wind TurbineDocument6 pagesModelling and Simulation of Doubly Fed Induction Generator Varable Speed Wind TurbineSandeepKumarPas encore d'évaluation
- Abstract:: Key Word: Induction Motor, EfficiencyDocument6 pagesAbstract:: Key Word: Induction Motor, Efficiencysrinivasan_smartPas encore d'évaluation
- Concepts, Simulation and Testing For Pico Hydro NetworksDocument6 pagesConcepts, Simulation and Testing For Pico Hydro NetworksEngineers Without Borders UK0% (1)
- Volume (8) Issue (4) 493-507Document15 pagesVolume (8) Issue (4) 493-507Seid BegovicPas encore d'évaluation
- RDocument8 pagesRhamza gaPas encore d'évaluation
- APPLICATION OF MATRIX CONVERTER IN WIND PMSGDocument8 pagesAPPLICATION OF MATRIX CONVERTER IN WIND PMSGChetan GhatagePas encore d'évaluation
- Jjmie: Modeling and Optimization of Wind Turbine Driving Permanent Magnet Synchronous GeneratorDocument6 pagesJjmie: Modeling and Optimization of Wind Turbine Driving Permanent Magnet Synchronous GeneratorhassenbbPas encore d'évaluation
- Advanced in Control Engineeringand Information ScienceDocument5 pagesAdvanced in Control Engineeringand Information ScienceLuemba DayzesPas encore d'évaluation
- Cycloconverter drives synchronous motorsDocument6 pagesCycloconverter drives synchronous motorsmipanduro7224Pas encore d'évaluation
- Expanded Slip Limits in Double Fed Asynchronous Generator SystemDocument5 pagesExpanded Slip Limits in Double Fed Asynchronous Generator SystemJohnny4JohnnyPas encore d'évaluation
- Efficiency Maps of Electrical MachinesDocument9 pagesEfficiency Maps of Electrical Machinesmdht1556Pas encore d'évaluation
- Efficiency Aspects of Vector Control Applied To Synchronous Reluctance MotorsDocument7 pagesEfficiency Aspects of Vector Control Applied To Synchronous Reluctance MotorsNeeraj GahlainPas encore d'évaluation
- Power Optimization and Control in Wind Energy Conversion Systems Using Extremum SeekingDocument12 pagesPower Optimization and Control in Wind Energy Conversion Systems Using Extremum SeekingVijay RajuPas encore d'évaluation
- Power System Dynamics and ControlDocument9 pagesPower System Dynamics and ControlBiplab SarkarPas encore d'évaluation
- Using PSO and BA To Design Optimal Speed Parameters of Wind Turbine GeneratorsDocument6 pagesUsing PSO and BA To Design Optimal Speed Parameters of Wind Turbine GeneratorsSamir2020Pas encore d'évaluation
- Power and Energy Analysis of Commercial Small Wind Turbine SystemsDocument6 pagesPower and Energy Analysis of Commercial Small Wind Turbine SystemsKamal DrawilPas encore d'évaluation
- Control of A PMSG Based Wind Energy Generation System For Power Maximization and Grid Fault ConditionsDocument10 pagesControl of A PMSG Based Wind Energy Generation System For Power Maximization and Grid Fault ConditionsHieu VuPas encore d'évaluation
- Synchronous Drive PerformanceDocument8 pagesSynchronous Drive PerformancehaimantiPas encore d'évaluation
- Ieee 5Document10 pagesIeee 5Thiaga RajanPas encore d'évaluation
- AC Machines Lab. Experiment No.2: University Electronics Engineering College Systems and Control DepDocument6 pagesAC Machines Lab. Experiment No.2: University Electronics Engineering College Systems and Control DepQusai JamalPas encore d'évaluation
- School of Electrical, Electronic and Communications EngineeringDocument7 pagesSchool of Electrical, Electronic and Communications EngineeringIsmail HussainPas encore d'évaluation
- Study of a reluctance magnetic gearbox for energy storage system applicationD'EverandStudy of a reluctance magnetic gearbox for energy storage system applicationÉvaluation : 1 sur 5 étoiles1/5 (1)
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlD'EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlÉvaluation : 5 sur 5 étoiles5/5 (1)
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsD'EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsPas encore d'évaluation
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesD'EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesPas encore d'évaluation
- Boiler Performance Improvement Due To Intelligent Sootblowing Utilizing Real-Time Boiler MonitoringDocument33 pagesBoiler Performance Improvement Due To Intelligent Sootblowing Utilizing Real-Time Boiler MonitoringGowtham Naidu GummadiPas encore d'évaluation
- Spray Control at TPPDocument13 pagesSpray Control at TPPPUSHKARKHANNAPas encore d'évaluation
- Reducing Coking SteamDocument8 pagesReducing Coking SteamPUSHKARKHANNAPas encore d'évaluation
- ESP TestDocument26 pagesESP TestPUSHKARKHANNAPas encore d'évaluation
- CLDocument13 pagesCLspicycartoonPas encore d'évaluation
- MNRE Scheme-Bagasse Biomass-May 2018Document9 pagesMNRE Scheme-Bagasse Biomass-May 2018PUSHKARKHANNAPas encore d'évaluation
- Greenhouse Gas Emissions from Fuel CombustionDocument11 pagesGreenhouse Gas Emissions from Fuel CombustionPUSHKARKHANNAPas encore d'évaluation
- Gasification - Case - Story - 04 With Good Block DiagramDocument19 pagesGasification - Case - Story - 04 With Good Block DiagramPUSHKARKHANNA100% (1)
- Flare Gas Recovery Systen GeneralDocument4 pagesFlare Gas Recovery Systen GeneralPUSHKARKHANNAPas encore d'évaluation
- ESP Design ParametersDocument34 pagesESP Design ParametersssirupaPas encore d'évaluation
- Biomass Briquette Machine Calculations PDFDocument52 pagesBiomass Briquette Machine Calculations PDFPUSHKARKHANNA100% (2)
- Centrifugal Compressor BasicsDocument45 pagesCentrifugal Compressor BasicsAnkit Gandhi100% (1)
- Design and Operating Parameters of ESPsDocument47 pagesDesign and Operating Parameters of ESPsarisPas encore d'évaluation
- Capacity Control of Screw Compressor PDFDocument8 pagesCapacity Control of Screw Compressor PDFshyam_anupPas encore d'évaluation
- Tips For Chiller Energy SavingsDocument3 pagesTips For Chiller Energy SavingsPUSHKARKHANNAPas encore d'évaluation
- 2 Mnre Program2Document11 pages2 Mnre Program2parchure123Pas encore d'évaluation
- Labsa Flow ChartDocument10 pagesLabsa Flow ChartPUSHKARKHANNA100% (1)
- MSW Plant LayoutDocument5 pagesMSW Plant LayoutPUSHKARKHANNAPas encore d'évaluation
- Labsa Report 0-0-11 Jan 2016 1620473101prefeasibilityreportDocument24 pagesLabsa Report 0-0-11 Jan 2016 1620473101prefeasibilityreportPUSHKARKHANNAPas encore d'évaluation
- Fundamentals of The EAF ProcessDocument54 pagesFundamentals of The EAF ProcessradynasrPas encore d'évaluation
- Descaling Pump VFD Case StudyDocument4 pagesDescaling Pump VFD Case StudyPUSHKARKHANNAPas encore d'évaluation
- Continuous Casting ProcessDocument12 pagesContinuous Casting ProcessPUSHKARKHANNAPas encore d'évaluation
- Air Mist For CCMDocument4 pagesAir Mist For CCMPUSHKARKHANNAPas encore d'évaluation
- Energy Efficiency Improvement in A Hot Strip Mill by Using Variable Speed DrivesDocument6 pagesEnergy Efficiency Improvement in A Hot Strip Mill by Using Variable Speed DrivesPUSHKARKHANNAPas encore d'évaluation
- A Study On Improved Biomass Briquet TingDocument8 pagesA Study On Improved Biomass Briquet Tingvaluer99Pas encore d'évaluation
- Coca Cola Conversion MiteshpandayDocument16 pagesCoca Cola Conversion MiteshpandayPUSHKARKHANNAPas encore d'évaluation
- Save Energy Costs with NTB NyTran Flat BeltsDocument4 pagesSave Energy Costs with NTB NyTran Flat BeltsPUSHKARKHANNAPas encore d'évaluation
- Ammonia Absorption Refrigeration Technology GuideDocument24 pagesAmmonia Absorption Refrigeration Technology GuidePUSHKARKHANNAPas encore d'évaluation
- 1 MW SPV Tech SpecificationsDocument72 pages1 MW SPV Tech SpecificationsPUSHKARKHANNA100% (1)
- Bab 2 - Coal Handling PlantDocument10 pagesBab 2 - Coal Handling PlantmasgrahaPas encore d'évaluation
- Digital Power Meter-PM 800 SeriesDocument14 pagesDigital Power Meter-PM 800 SeriesAlfiansyah Dharma Setia DjaketraPas encore d'évaluation
- Installation and Operation Manual - Growatt - MOD 3 15KTL3 X - Inverters - 2021 - ENGDocument30 pagesInstallation and Operation Manual - Growatt - MOD 3 15KTL3 X - Inverters - 2021 - ENGMarius Constantin VochinPas encore d'évaluation
- Capacitor BankDocument6 pagesCapacitor BankJoe Ros100% (2)
- A3100 PDFDocument2 pagesA3100 PDFirfanWPKPas encore d'évaluation
- Module 10 Measuring InstrumentsDocument19 pagesModule 10 Measuring InstrumentsRavinder SharmaPas encore d'évaluation
- Question 4 (G10.14) : (A) Draw The Impedance Diagram With The ImpedancesDocument8 pagesQuestion 4 (G10.14) : (A) Draw The Impedance Diagram With The ImpedancesazlinazaidiPas encore d'évaluation
- Part 1 - Main Spec To Annexure 1 - DG Set Technical Spec - HPCL 1530879310Document25 pagesPart 1 - Main Spec To Annexure 1 - DG Set Technical Spec - HPCL 1530879310how areyouPas encore d'évaluation
- AcuRev 1310 DIN Rail Power and Energy Meter DatasheetDocument6 pagesAcuRev 1310 DIN Rail Power and Energy Meter DatasheetEl Ajiaco BikePas encore d'évaluation
- 100KW 1MW InverterDocument6 pages100KW 1MW InverterJose MontillaPas encore d'évaluation
- BEEE QuestionsDocument8 pagesBEEE QuestionsPavan KhetrapalPas encore d'évaluation
- Electrical Calculation SheetsDocument4 pagesElectrical Calculation SheetsHusamHaskoPas encore d'évaluation
- Transformers: Practice Problems: Set 1Document2 pagesTransformers: Practice Problems: Set 1Suryansh Singh RawatPas encore d'évaluation
- LTMR100EFM Motor Controller DatasheetDocument3 pagesLTMR100EFM Motor Controller DatasheetAjayprakash MishraPas encore d'évaluation
- Three Phase Induction Motor ReportDocument24 pagesThree Phase Induction Motor ReportSiddharth NandhanPas encore d'évaluation
- Ace Circuit BuilderDocument186 pagesAce Circuit BuilderBráulio SoaresPas encore d'évaluation
- Technical Dairy: 1-Boiler and Auxillaries Main BoilerDocument59 pagesTechnical Dairy: 1-Boiler and Auxillaries Main Boilersuleman247Pas encore d'évaluation
- Tesla Coil ConstructionDocument35 pagesTesla Coil Constructionzudan2013Pas encore d'évaluation
- GW BT Datasheet-EnDocument1 pageGW BT Datasheet-EnLong BunPas encore d'évaluation
- Jour Janu Feb 11Document24 pagesJour Janu Feb 11Arijit GangulyPas encore d'évaluation
- Merus A2 Module User Manual 3.1 PDFDocument110 pagesMerus A2 Module User Manual 3.1 PDFFawad NoorPas encore d'évaluation
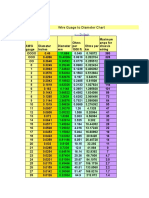
- Wire GuageDocument13 pagesWire GuageAkd DeshmukhPas encore d'évaluation
- 2UEB000487 v1 Drive On GeneratorDocument19 pages2UEB000487 v1 Drive On GeneratorSherifPas encore d'évaluation
- Capacitor and Arrester GEDocument68 pagesCapacitor and Arrester GEricharhenPas encore d'évaluation
- Relay Selection Guide A1 enDocument26 pagesRelay Selection Guide A1 enAdamian InakeaPas encore d'évaluation
- Module-4 Reactive Power Compensation and Voltage ControlDocument24 pagesModule-4 Reactive Power Compensation and Voltage ControlNiharikaPas encore d'évaluation
- PHILIPS Lighting Handbook Correspondence Course HP and MHLDocument52 pagesPHILIPS Lighting Handbook Correspondence Course HP and MHLsteven32419021Pas encore d'évaluation
- EEMDocument17 pagesEEMSandaruwan සුජීවPas encore d'évaluation
- Difference Between Active and Reactive PowerDocument2 pagesDifference Between Active and Reactive PowerDada Khalandar ShaikPas encore d'évaluation