Vous aimerez peut-être aussi
- Solucionario Actualizado Caf 1 - PC2 - UltimoDocument130 pagesSolucionario Actualizado Caf 1 - PC2 - UltimoJosé M89% (9)
- Calculo Numero de Botellas AcumuladorDocument4 pagesCalculo Numero de Botellas AcumuladorWilson Rivera100% (3)
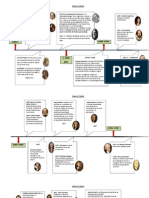
- Línea de Tiempo de Fisicos Destacados Mejorada-FinalDocument5 pagesLínea de Tiempo de Fisicos Destacados Mejorada-FinalNadia Marinka Igor Villanueva100% (6)
- Sistema de NumeraciónDocument1 pageSistema de NumeraciónWashington Meneses MenesesPas encore d'évaluation
- Ejercicios de Polinomios para Primero de SecundariaDocument6 pagesEjercicios de Polinomios para Primero de SecundariaJorge ValerPas encore d'évaluation
- Presentación Bases Curriculares 7° Básico A 2° Medio - MatemáticaDocument20 pagesPresentación Bases Curriculares 7° Básico A 2° Medio - MatemáticaAlberto HurtadoPas encore d'évaluation
- Practica 5. Fisica LabDocument3 pagesPractica 5. Fisica LabEli CarranzaPas encore d'évaluation
- Conceptos Fundamentales en La Evaluación PsicológicaDocument2 pagesConceptos Fundamentales en La Evaluación Psicológicasixto bonillaPas encore d'évaluation
- Trabajo Estadística InferencialDocument24 pagesTrabajo Estadística InferencialSebastian GamarraPas encore d'évaluation
- Presentación Nº1Document5 pagesPresentación Nº1SamuelAdamSossaLaymePas encore d'évaluation
- 33 Arboles de Predicción Tree-Based, Bagging, Random Forest, BoostingDocument97 pages33 Arboles de Predicción Tree-Based, Bagging, Random Forest, BoostingDavid DavidPas encore d'évaluation
- 0 0 Modeloexamen 3 P Analisis Mat2º P GlobalDocument5 pages0 0 Modeloexamen 3 P Analisis Mat2º P GlobalFrancisco Martínez NavarroPas encore d'évaluation
- Ado 2.5Document19 pagesAdo 2.5Masvec 107Pas encore d'évaluation
- Diseño E-ABR - Fundamento CálculoDocument5 pagesDiseño E-ABR - Fundamento CálculoKevin PerezPas encore d'évaluation
- Deber N-1Document3 pagesDeber N-1STIVEN VALDIVIEZOPas encore d'évaluation
- Guía de Ejercicios Análisis Estadístico de DatosDocument2 pagesGuía de Ejercicios Análisis Estadístico de DatosltoledovillagraPas encore d'évaluation
- Resumen de AplicacionesDocument247 pagesResumen de AplicacionesmarcoPas encore d'évaluation
- Tesis Maestría Enseñanza de Lógica - Jacinto Córdova GuimarayDocument125 pagesTesis Maestría Enseñanza de Lógica - Jacinto Córdova Guimaraygabrielgonza2000Pas encore d'évaluation
- Necc 07 PDFDocument70 pagesNecc 07 PDFnestorPas encore d'évaluation
- Wo 006-Cw91834-Deyfor-Cc-011 - 0 RugosimetroDocument3 pagesWo 006-Cw91834-Deyfor-Cc-011 - 0 RugosimetrojorgePas encore d'évaluation
- Metodos de ProgramacionDocument4 pagesMetodos de ProgramacionLety PvPas encore d'évaluation
- Guia de Trabajo Cuarto Basico DivisoresDocument5 pagesGuia de Trabajo Cuarto Basico DivisoresCarmen Gloria Bravo GonzálezPas encore d'évaluation
- Autónomo 1.3. Distribuciones Discretas 20200717 PDFDocument3 pagesAutónomo 1.3. Distribuciones Discretas 20200717 PDFsantiago vacaPas encore d'évaluation
- CRUCIGRAMA MATEMÁTICO - Semana Del 12 Al 16 de Julio de 2021Document5 pagesCRUCIGRAMA MATEMÁTICO - Semana Del 12 Al 16 de Julio de 2021noah ackermanPas encore d'évaluation
- Continuidad de FuncionesDocument7 pagesContinuidad de FuncionesAlex GonzalezPas encore d'évaluation
- Fundamentos-Del-Calculo - Ruben Flores EspinozaDocument266 pagesFundamentos-Del-Calculo - Ruben Flores EspinozaVega R JosePas encore d'évaluation
- Ejercicios de Perímetros y Áreas para Segundo de SecundariaDocument5 pagesEjercicios de Perímetros y Áreas para Segundo de SecundariaGid Reynoso PomaPas encore d'évaluation
- Liquid ADocument1 pageLiquid AAriel C ChPas encore d'évaluation
- Tarea I Cálculo VectorialDocument7 pagesTarea I Cálculo VectorialStalyn EncarnacionPas encore d'évaluation
- Guia Sobre Razones de CambioDocument2 pagesGuia Sobre Razones de CambioMario MedinaPas encore d'évaluation